ubuntu20.04下turtlebot3与cartographer结合使用–建图与定位
ubuntu20.04下turtlebot3与cartographer结合使用–建图与定位
目录
- ubuntu20.04下turtlebot3与cartographer结合使用--建图与定位
-
- 参考链接
-
- turtlebot3安装
- Cartographer安装
- 2D建图仿真
-
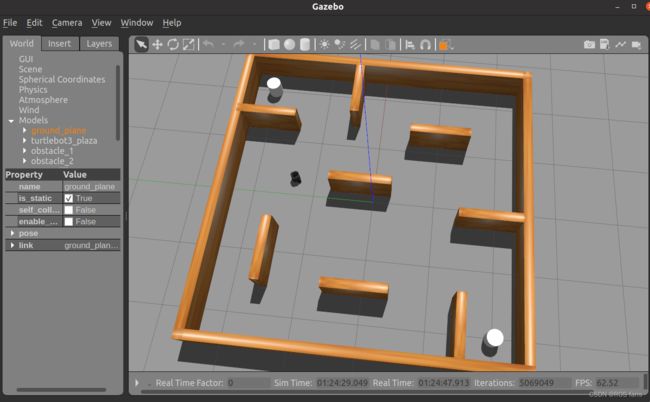
- 1.启动Gazebo仿真
- 2.启动slam
- 3. 将地图保存.pbstream文件
- 4. 可以通过cartographer提供的ros包,将后缀名为.pbstream的地图信息,转化成ros地图信息,用于其他方式的定位,如AMCL
- 5. 基于已有地图定位
参考链接
turtlebot3安装
-
turtlebot3
-
turtlebot3_msgs
-
turtlebot3_simulations
以上3个功能包都需安装编译
Cartographer安装
GitHub
- https://github.com/cartographer-project/cartographer
- https://github.com/cartographer-project/cartographer_ros
Google文档–强力推荐
- Cartographer ROS
CSDN
- cartographer探秘第一章之安装编译与参数配置
2D建图仿真
1.启动Gazebo仿真
roslaunch turtlebot3_gazebo turtlebot3_stage_4.launch
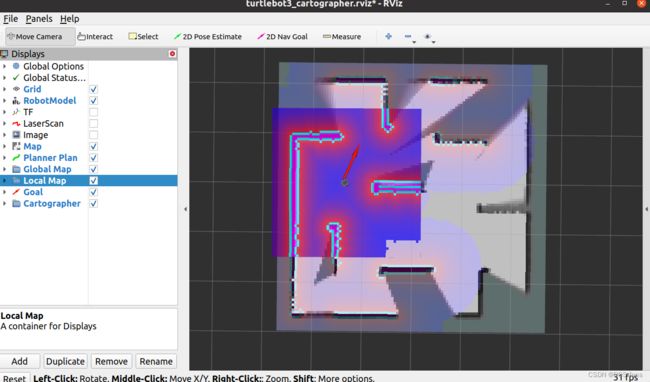
2.启动slam
turtlebot3已包含与cartographer相关的启动配置文件,故只需安装好cartographer,便可通过以下命令启动cartographer的slam建图,包含move_base节点
roslaucn turtlebot3_slam turtlebot3_slam.launch slam_methods:=cartographer
注:
turtlebot3_slam/config文件目录下已有turtlebot3_lds_2d.lua,也可以自定义新建.lua文件
同样保存在turtlebot3_slam/config文件目录下,方便后续动态调用
参考古月居的文档
turtlebot3_carto.lua
include "map_builder.lua"
include "trajectory_builder.lua"
options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map",
tracking_frame = "base_footprint",
published_frame = "odom",
odom_frame = "odom",
provide_odom_frame = false, --算法内部提供里程计
publish_frame_projected_to_2d = false,
use_odometry = true, --使用里程计
use_nav_sat = false,
use_landmarks = false,
num_laser_scans = 1,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 1,
num_point_clouds = 0,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 1.,
odometry_sampling_ratio = 1.,
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1.,
landmarks_sampling_ratio = 1.,
}
MAP_BUILDER.use_trajectory_builder_2d = true
TRAJECTORY_BUILDER_2D.submaps.num_range_data = 35
TRAJECTORY_BUILDER_2D.min_range = 0.3
TRAJECTORY_BUILDER_2D.max_range = 8.
TRAJECTORY_BUILDER_2D.missing_data_ray_length = 1.
TRAJECTORY_BUILDER_2D.use_imu_data = false
TRAJECTORY_BUILDER_2D.imu_gravity_time_constant = 9.8
TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = true
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.linear_search_window = 0.1
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.translation_delta_cost_weight = 10.
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.rotation_delta_cost_weight = 1e-1
POSE_GRAPH.optimization_problem.huber_scale = 1e2
POSE_GRAPH.optimize_every_n_nodes = 35
POSE_GRAPH.constraint_builder.min_score = 0.65
return options
通过以下命令动态加载自定义.lua文件
roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=cartographer configuration_basename:=turtlebot3_carto.lua
3. 将地图保存.pbstream文件
参考链接
rosservice call /write_state "{filename: '/home/chj/maps/carto_test.pbstream', include_unfinished_submaps: true}"
filename路径自行选择
4. 可以通过cartographer提供的ros包,将后缀名为.pbstream的地图信息,转化成ros地图信息,用于其他方式的定位,如AMCL
rosrun cartographer_ros cartographer_pbstream_to_ros_map -map_filestem=/home/chj/maps/carto_test -pbstream_filename=/home/chj/maps/carto_test.pbstream -resolution=0.05

5. 基于已有地图定位
使用已经建立好的地图进行定位,同时进行增量式更新地图
- 在turtlebot3_slam/config文件目录下新建
turtlebot3_carto_localization.lua
include "turtlebot3_carto.lua"
--TRAJECTORY_BUILDER.pure_localization = true (不需要这句,否则报错)
TRAJECTORY_BUILDER.pure_localization_trimmer = {
max_submaps_to_keep = 3,
}
POSE_GRAPH.optimize_every_n_nodes = 50
return options
- 选择在turtlebot3_slam/launch文件目录下新建turtlebot3_carto_localization.launch
<launch>
<arg name="model" default="$(env TURTLEBOT3_MODEL)" doc="model type [burger, waffle, waffle_pi]"/>
<arg name="configuration_basename" default="turtlebot3_carto_localization.lua"/>
<arg name="open_rviz" default="true"/>
<arg name="arg load_state_filename" default="/home/chj/maps/carto_test.pbstream"/>
<include file="$(find turtlebot3_bringup)/launch/turtlebot3_remote.launch">
<arg name="model" value="$(arg model)" />
include>
<include file="$(find turtlebot3_navigation)/launch/move_base.launch">
<arg name="model" value="$(arg model)" />
include>
<node pkg="cartographer_ros" type="cartographer_node" name="cartographer_node"
args="-configuration_directory $(find turtlebot3_slam)/config
-configuration_basename $(arg configuration_basename)
-load_state_filename $(arg load_state_filename)"
output="screen">
<remap from="/imu" to="/flat_imu"/>
node>
<node pkg="cartographer_ros" type="cartographer_occupancy_grid_node"
name="cartographer_occupancy_grid_node"
args="-resolution 0.05" />
<node pkg="turtlebot3_slam" type="flat_world_imu_node" name="flat_world_imu_node" output="screen">
<remap from="imu_in" to="/imu" />
<remap from="imu_out" to="/flat_imu" />
node>
<group if="$(arg open_rviz)">
<node pkg="rviz" type="rviz" name="rviz" required="true"
args="-d $(find turtlebot3_slam)/rviz/turtlebot3_$(arg slam_methods).rviz"/>
group>
launch>
注:
动态参数load_state_filename的default应当为之前保存的.pbstream路径
- 仿真测试
roslaunch turtlebot3_gazebo turtlebot3_stage_4.launch
roslaunch turtlebot3_slam turtlebot3_carto_localization.launch