2022.06.23短学期mini2智行小车学习——初识ROS

什么是ROS:
机器人操作系统(Robot Operating System),一般简称为 ROS,它是一个应用于机器人之上的操作系统。
目前越来越多的机器人、无人机甚至无人车都开始采用 ROS 作为开发平台,尽管 ROS 在实用方面目前还存在一些限制,但前途非常光明。
随着技术进步,机器人产业分工开始走向细致化、多层次化,如今的电机、底盘、激光雷达、摄像头、机械臂等等元器件都有不同厂家专门生产。社会分工加速了机器人行业的发展。而各个部件的集成就需要一个统一的软件平台,在机器人领域,这个平台就是机器人操作系统 ROS。
ROS 是一个适用于机器人编程的框架,这个框架把原本松散的零部件耦合在了一起,为他们提供了通信架构。ROS 虽然叫做操作系统,但并非 Windows、Mac 那样通常意义的操作系统,它只是连接了操作系统和你开发的 ROS 应用程序,所以它也算是一个中间件,基于 ROS 的应用程序之间建立起了沟通的桥梁,所以也是运行在 Linux 上的运行环境,在这个环境上,机器人的感知、决策、控制算法可以更好的组织和运行。
ROS 机器人操作系统具有以下的特点:
⚫ 分布式 点对点
ROS 采用了分布式的框架,通过点对点的设计让机器人的进程可以分别运行,便于模块化的修改和定制,各个模块之间为松耦合机制,独立存在,不受其他进程影响,提高了系统的容错能力。
⚫ 多种语言支持
ROS 支持多种编程语言。C++、Pyhton 和已经在 ROS 中实现编译,是目前应用最广的 ROS开发语言,Lisp、C#、Java 等语言的测试库也已经实现,甚至 Matlab 等工具也提供了 ROS支持。为了支持多语言编程,ROS 采用了一种语言中立的接口定义语言来实现各模块之间消息传送。通俗的理解就是,ROS 的通信格式和用哪种编程语言来写无关,它使用的是自身定义的一套通信接口。
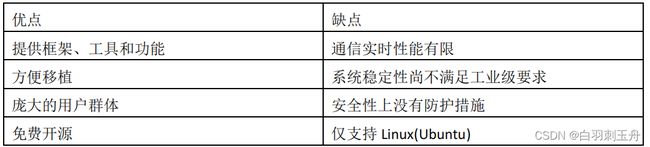
⚫ 开源社区
ROS 具有一个庞大的社区 ROS WIKI(http://wiki.ros.org/ ),这个网站将会始终伴随着你ROS 开发
ROS 系统的架构主要被分为三部分,每一部分都代表一个层级概念
⚫ 文件系统级
⚫ 计算图级
⚫ 开源社区级
第一级是文件系统级,在这一级中,我们通过描述 ROS 文件在操作系统中的位置与包含关系来描述 ROS 的内部组成,文件夹结构,以及工作所需文件。
第二级是计算图级,体现为系统与进程之间的通讯。
第三级是开源社区级,我们将介绍 ROS 中的工具与概念,ROS 用户之间如何共享知识, 算法和代码。正是在开源社区的大力支持下 ROS 系统才得以快速成长。
ROS 文件系统
ROS 中的文件系统和我们平时了解的操作系统类似,一个 ROS 程序的不同组件要放在
不同的文件夹下面。这些文件夹是根据功能的不同来对文件进行组织的。最上层的文件夹名
为工作空间。



 • src/: ROS 的 catkin 软件包(源代码包)
• src/: ROS 的 catkin 软件包(源代码包)
• build/: catkin(CMake)的缓存信息和中间文件
• devel/: 生成的目标文件(包括头文件,动态链接库,静态链接库,可执行文件等)、 环境变量


重新编译工作环境,回到工作空间根目录下,输入 catkin_make 即可完成编译

![]()
这是由于没有配置环境的原因所造成的,
解决方法:输入命令行source ~/catkin_ws/devel/setup.bash

设置input、output语音阵列
启动:roslaunch robot_voice iat_publish.launch
唤醒:rostopic pub /robot_voice/asr_topic std_msgs/String "data: ''"

后遇报错Recognizer error 10407
参考:
ROS科大讯飞语音错误:Recognizer error 10407_吃胡萝卜的兔酱的博客-CSDN博客_科大讯飞错误代码10407ROS科大讯飞语音错误:Recognizer error 104071.问题描述2.问题解决3.关于 Ubuntu16.04下 科大讯飞SDK的下载与测试相关链接1.问题描述环境ubuntu16.04+kinetic从讯飞官网下载SDK在运行例行程序时报错Recognizer error 10407这问题说明SDK和AppID和你的应用没有对应上在找到对应文件看了AppID后没有问题然后又按照教材执行了一遍,发现问题在so文件复制上2.问题解决so文件的复制与链接:进入到 Linux_ihttps://blog.csdn.net/weixin_44911552/article/details/117134933
将/x64文件夹下libmsc.so复制覆盖/usr/local/lib/libmsc.so
cd mini2_ws/src/robot_voice/libs/x64
sudo cp libmsc.so /usr/local/lib/
复制完so文件后,执行sudo ldconfig
语音识别:roslaunch robot_voice iat_publish.launch
语义识别:roslaunch robot_voice nlu_tuling.launch
智能问答:roslaunch robot_voice chat_robot.launch
唤醒:rostopic pub /robot_voice/asr_topic std_msgs/String "data: ''" 成功
成功

参考:
mplayer: could not connect to socket mplayer: No such file or directory Failed to open LIRC support._--天行健地势坤--的博客-CSDN博客当出现mplayer: could not connect to socketmplayer: No such file or directoryFailed to open LIRC support. You will not be able to use your remote control.错误时修改mplayer即可 gedit ~/.mplayer/config 加入l...https://blog.csdn.net/u011573853/article/details/103164128
修改~/.mplayer/config,设置lirc=no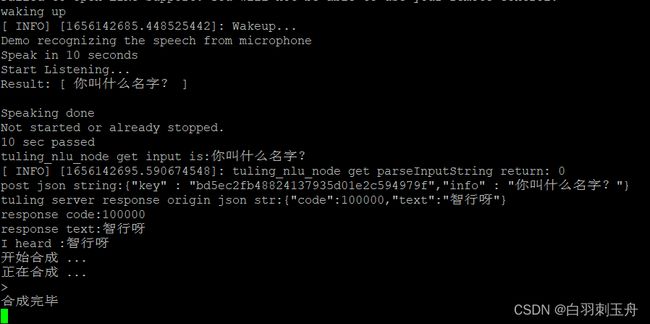
人脸识别
要先启动发布图像消息的节点
roslaunch astra_camera dabai_u3.launch
再运行人脸检测

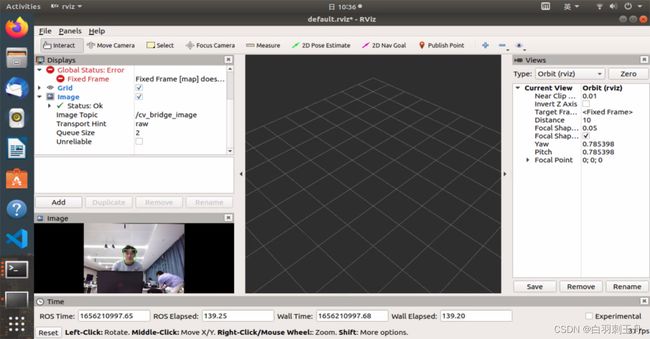
检测结果:
第一种方法:新建终端输入 rqt_image_view 在 image_topic 选择 cv_bridge_image 查看;
第二种方法:在 rviz 打开 cv_bridge_image 查看
新建一个终端输入 rviz
左边点击 add ,选中 image
在 image 的 topic 选项中选 cv_bridge_image image查看

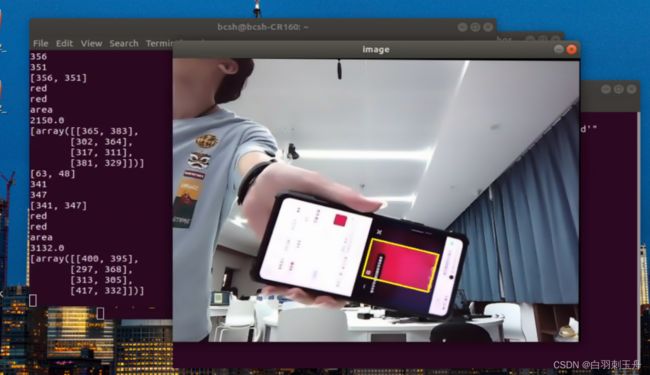
颜色识别
启动深度相机驱动 :roslaunch astra_camera dabai_u3.launch
启动视觉检测程序:rosrun openvino RGBcube_detector.py(启动检测程序、后选择一个检测目标)
发布检测的颜色:rostopic pub /cube_choose std_msgs/String "data: 'red'"
Red
Blue

第一步:绘制地图
在robot_shell目录下启动./7 tab补全
第二个窗口不能timeout

在最后一个窗口控制小车行进建模
保存地图:终端窗口运行roslaunch robot_slam save_map.launch
第二步:测试地图以及路径规划
在robot_shell目录下启动./8 tab补全
绿色箭头调整小车位置
新建终端窗口运行rostopic echo /move_base_simple/goal 查看座标位置信息。
紫色箭头控制小车目的地
之后我们在rviz里选择2dnavgoal在终点位置标注下,之后回到查看座标终端记录坐标信息,记录目标位置坐标,

打开mini2_ws/src/mini2_arm/src/control_center.cpp,找到图片所示位置更改,此外,我们还可以在该文件内修改抓取与释放时机械臂位置,更改完成后,在mini2_ws文件夹下新建终端输入指令:catkin_make,编译。

home文件夹下运行RGBcube脚本
新建终端输入:rostopic pub /robot_voice/asr_topic std_msgs/String "data: 'red'"
激活语音识别程序,在第五个窗口下(RGBcube窗口说出要识别的红色蓝色绿色中的一种),之后开始自动识别物块并抓取到指定位置

最终效果:智行小车——致大学最后一个短学期_哔哩哔哩_bilibili