STM32CUBEMX_DMA串口空闲中断接收+接收发送缓冲区
STM32CUBEMX_DMA串口空闲中断接收+接收发送缓冲区
前言:
我了解的串口接收指令的方式有:在这里插入图片描述
1、接收数据中断+特定帧尾
2、接收数据中断+空闲中断
3、DMA接收+空闲中断
我最推荐第三种,尤其是数据量比较大且频繁的时候
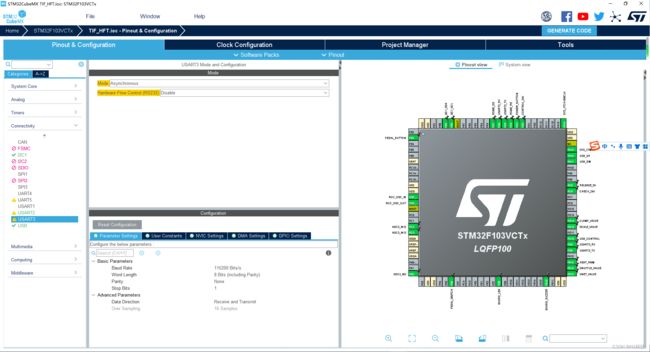
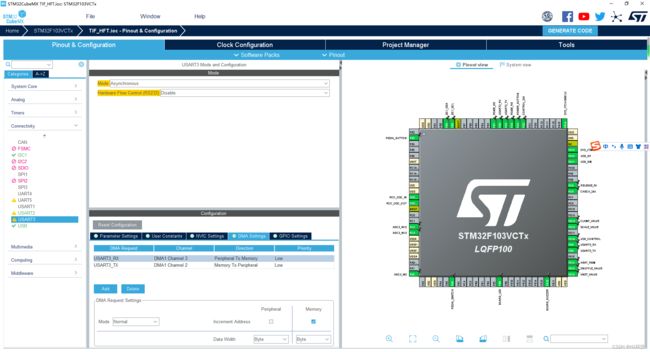
串口配置

my_it.c
#include "my_it.h"
#include "mymain.h"
#include "main.h"
#include "gpio.h"
#include "tim.h"
#include "usart.h"
#include "uart_lcd.h"
void MY_UART_IDLECallback(UART_HandleTypeDef *huart)//自定义的串口超时中断回调函数
{
HAL_UART_DMAStop(&huart3); //暂停DMA
unsigned char data_length = BUFFER_SIZE - __HAL_DMA_GET_COUNTER(&hdma_usart3_rx); //计算此帧数据长度
if(data_length == RBUFF_UNIT)
{
unsigned char recv_data[10] = {0};
memcpy(recv_data,receive_buff,RBUFF_UNIT);
RxDataBufCheck(recv_data,RBUFF_UNIT);
}
//HAL_UART_Transmit_DMA(&huart3,receive_buff,data_length); //回环测试,接收到什么返回什么
HAL_UART_Receive_DMA(&huart3, (unsigned char*)receive_buff, BUFFER_SIZE); //继续开启接收
data_length = 0;
}
void MY_UART_IRQHandler(UART_HandleTypeDef *huart)//此函数调用放在void USART3_IRQHandler(void)内执行
{
if(USART3 == huart->Instance)
{
if(RESET != __HAL_UART_GET_FLAG(&huart3, UART_FLAG_IDLE)) //判断是否是空闲中断
{
__HAL_UART_CLEAR_IDLEFLAG(&huart3); //清除空闲中断
MY_UART_IDLECallback(huart); //空闲中断处理函数
}
}
}
my_it.h
#ifndef __MY_IT_H
#define __MY_IT_H
#include "log.h"
#include "usart.h"
extern DMA_HandleTypeDef hdma_usart3_rx;
void MY_UART_IRQHandler(UART_HandleTypeDef *huart);
void MY_UART_IDLECallback(UART_HandleTypeDef *huart);
#endif
uart_lcd.c
#include "uart_lcd.h"
#include "sensor.h"
#include "dev_control.h"
#include uart_lcd.h
#ifndef __UART_LCD_H
#define __UART_LCD_H
#include "main.h"
#include "log.h"
#include "usart.h"
#include "eeprom.h"
#include