智能仓系统设计(AGV结构设计、导航算法、路径算法、上位机、仿真等)
导语
大家好,我是智能仓储物流技术研习社的社长,你的老朋友,老K。行业群
新书《智能物流系统构成与技术实践》
作者:广东产品质量监督检验研究院林晋立
广州铁路集团羊城铁路总公司林钦志
来源:<<机电工程技术>>
随着自动化技术、计算机技术和人工智能技术的不断发展,过去将货物堆积在地面的存储方式已被取代,立体货架成为仓储的一大亮点。自动化仓储的特点是存储量大,货物存取效率高。
本文设计排烟防火阀门行业的智能仓储系统,可对排烟防火阀门行业进行高效存储与运输,减少阀门存储过程中浪费的时间,提高储运效率,节约人力和成本。
一、智能仓储系统工作原理
智能仓储系统即通过自动化控制的仓库存储与运输系统。仓储系统通过智能机械运输工具实现货物的自动入库与出库,上位机系统则实时记录仓库中货物存储的具体位置及空闲库位。
智能仓储系统自动化程度极高,产品出入库由自动化运输机械来实现,替代了传统方式下工人的机械操作。上位机管理系统自动登记货物信息,替代了繁琐的人工盘点,极大提升仓库的储运效率。
智能仓储系统需要由AGV(AutomatedGuidedVehicle)来实现,AGV是指安装有自动导航装置,可根据导航沿指定路线行驶,具有躲避障碍等功能的运输车辆,以下简称“AGV无人车”。随着工业自动化的快速发展,AGV无人车已广泛应用于港口、码头、机场、仓储等运输行业,在智能仓储系统中扮演重要的角色。

二、智能仓储系统设计
2.1 仓储系统结构与组成
智能仓储系统由货仓、阀门运输工具和上位机控制软件组成。货仓主体结构为重型单元式货架,阀门运输工具为基于激光SLAM导航技术的AGV无人车。上位机管理软件可进行系统出入库的管理与AGV无人车路线的规划。
2.2 货仓设计
货仓由A、B两并排货架组成,货架间设有5m宽的过道供AGV无人车取货与转向。货架A为3层结构,每层可放置高宽尺寸范围在1.25m×1.25m内的排烟防火阀门;货架B为“H”型双层结构,上层放置高宽尺寸范围在1.25m×1.25m的阀门,下层可放置高宽尺寸范围在2.5m×1.25m内的阀门。货仓结构组成如图1所示。

图1 货仓结构
设计的货架由方形钢制管材焊接而成,属于重型单元式结构,每单元承重2000kg。货架每单元包含两个库位,一个库位对应放置一个川字托盘。每个川字托盘可容纳5个宽度尺寸为1.25m及以下的阀门,此设计可满足载重要求。
货架A包含12个单元,货架B包含8个单元,共可存放200个阀门。仓库占地面积小,能满足检测阀门的存储需求,若需存放阀门的数量超出范围,可相应增加货架的单元数量。
2.3 AGV无人车设计
2.3.1 整体结构
AGV无人车车身为四轮平衡重式结构,控制系统由主板、激光雷达、深度相机、IMU、通讯模块、里程计、电机驱动模块和液压升降模块组成。
主板选择Jesonna‐no,操作系统为Ubuntu18.04,可通过串口通信驱动底层STM32板卡控制电机模块与液压升降模块;激光雷达选择RPLIDARA2,其检测距离为0.2-12m,精度为测量值的2%,分辨率为测量值的1%;深度相机采用AstraPro,视场角(FOV:H58.4°×V40.2°),视距0.6-8m;IMU惯性测量单元为HWT905九轴陀螺仪传感器,可输出加速度、角度等数据。控制系统结构如图2所示。

图2 控制系统结构
2.3.2 激光SLAM导航系统
目前,AGV无人车导航技术有磁条导航、色带导航、二维码导航、激光导航、SLAM导航等。磁条导航需在地面铺设轨道,影响区域的通过性能;色带导航易受污染而影响导航的准确度。
激光导航需要设置反光板,价格昂贵。此系统采用激光SLAM导航技术,无需铺设轨道或使用反光板,通过仓库中的墙面、货架立柱等作为参照,实现定位与导航。
SLAM(SimultaneousLocalizationandMapping)即同步定位与地图构建技术,将AGV无人车置于货仓内任一位置并开始运动,通过激光雷达向参照物发射激光信号,与参照物反射的回波信号进行比较,从而获取AGV无人车的位置、速度等信息。
同时与深度相机、IMU、里程计获取的数据融合,可实现货仓地图构建、AGV无人车定位、避障、入库及自主导航的功能。
2.3.3 导航算法
SLAM导航算法分为两类:一类是基于滤波理论的SLAM算法,如AMCL、EKF、Gmapping等;另一类是基于图优化理论的SLAM算法,如Karto、Hector、Catogra‐pher等。
基于图优化理论的SLAM算法具有闭环检测环节,优化所使用的存储空间小,适用于构建大面积的场景。但此算法运算量大,使用普通设备难以进行复杂计算。基于粒子滤波理论的SLAM算法运算量小,适用于构建小面积的场景。
仓储空间在检测场地中占地面积小,本文结合实际场景,选择基于粒子滤波理论的Gmapping算法,Gmapping算法可实时构建场景地图,应用广泛。
定位及构图原理:将AGV无人车放置于仓储场景中的某一位置,分别设置初始状态下无人车、激光雷达和里程计的坐标系并进行坐标转换,使无人车从原点O0行驶至On位置,则O1,O2,…,On-1依次为其途经点。
在无人车行驶过程中,激光雷达发射激光束对周围环境进行扫描,激光束抵达的区域可标识为0,激光束无法抵达的区域即障碍物标识为1,则仓储环境可通过包含0、1信息的栅格地图进行表示。里程计则记录了无人车的位姿。无人车在O0-On的任一点都有自身的位姿和栅格地图数据。
无人车处于O1时,根据自身位姿预测一条行驶轨迹;到达O2时,通过里程计数据更新无人车位姿及地图;行驶到On,计算所有途经点的权重并构建出仓储区域的准确地图。
2.3.4 路径规划
若要使无人车运输阀门至指定位置,则需对其行驶路径进行规划。AGV无人车行驶路径规划主要分为两部分:入库路径规划和出库路径规划。
送检阀门运送至检测场地后,需要进行卸货、信息录入等操作。入库则是将阀门从信息录入区域运送至货仓库位上,AGV无人车完成一次入库后将回到信息录入区域。入库路径规划如图3所示。

图3 入库路径规划
出库是指将阀门从货仓相应库位移送至检测区域。一个川字托盘上放有5个阀门,将待检阀门取出后,需要把托盘放回原来的库位。出库路径规划如图4所示。
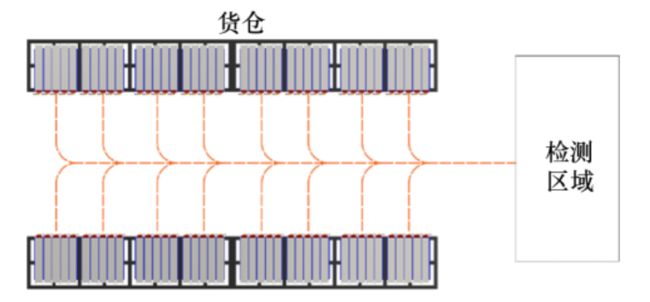
图4 出库路径规划
由于每次只取出托盘上的一个阀门进行检测,因此从检测区送回的托盘仍有剩余的存储空间。若有阀门需要存入,可设置路径让AGV无人车先把托盘移送至信息录入区,待阀门装满托盘后再将其运回原来库位,图5所示为AGV无人车对某一库位的阀门进行出库与补充入库的路径图。

图5 指定路径
2.4 上位机软件设计
上位机通过智能仓储管理软件对系统进行管理,软件具有库位状态显示、阀门信息查询和AGV无人车导航路径设置等功能。货仓中每个库位都有对应的编码,如货架A中层第1库位的库位号为A-m-1,货架B上层第8库位的库位号为B-u-8。
每个库位的状态可在软件的库位显示器中实时显示,如图6所示。其中绿色表示库位已装满、红色表示空闲库位、橙色表示该库位中阀门未装满。

图6 智能仓储管理系统界面
阀门送达检测场地后,业务员登记阀门信息并生成二维码(QRCode)标签,包含阀门编号、生产厂家、规格型号等信息。标签贴于阀体,是阀门唯一的标识。使用手持式读写终端扫描标签上的二维码,可将阀门编号录入仓储管理系统并为其分配库位。
查询区可通过输入阀门编号查找其所处库位,也可输入库位号查询库位中的所有阀门。在导航区中设置AGV无人车的运行方式、库位号、途经点等信息,系统将生成导航路径并发送至AGV无人车执行导航指令。
三、系统仿真与分析
在Inventor中对智能仓储系统建模,系统的总体布局如图7所示。

图7 智能仓储系统总体布局
设置AGV无人车行驶速度为0.5-3km/h,空载且直线行驶时速度可保持在3km/h。转弯速度应减慢以保持托盘上阀门的稳定,避免因惯性作用导致阀门掉落。
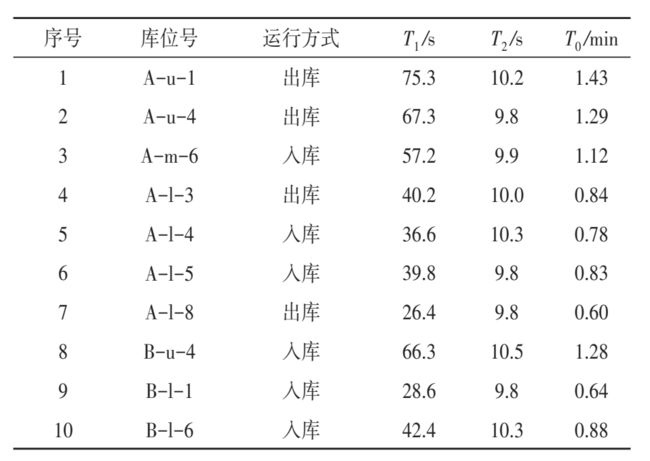
货叉的升降速度为10-15m/min,空载时升降速度可适当加快,负载时速度减慢。随机选取10个库位进行出入库的仿真分析,仿真结果如表1所示。表中,T1为AGV无人车行驶时间,T2为升降货叉及装卸托盘的操作时间,T0为完成一次运送任务的总时长。
由表可知,使用此智能仓储系统对检测阀门进行查询及运送的时间为0.60-1.43min,而通过人工查找与搬运的时间约为10-15min。智能仓储系统的工作效率相比人工操作提高了
85.7%-94.0%。
表1 10个库位仿真数据表
四、结束语
本文将自动化仓储技术应用于排烟防火阀门的存储与运输,设计了排烟防火阀门智能仓储系统。
系统采用并列式货架结构,使用激光SLAM技术对AGV无人车进行定位与导航,在上位机管理软件中设置AGV无人车的出入库路径。
设置了10组阀门出入库路径并进行仿真,仿真结果表明此智能仓储系统的工作效率相比人工操作提高了85.7%-94.0%。设计的排烟防火阀门智能仓储系统具备阀门自动出入库及库位状态实时显示等功能,系统准确、高效,具有一定的应用价值。
知名企业
读者福利:
抄底-仓储机器人-即买即用-免调试
甲乙双方人脉互配神器--->千人俱乐部
福利
知识社区:主要包含智能仓储物流自动化规划设计,自动化立体库、智能机器人,自动化拣选系统,仓储管理软件WMS,AGV/AMR应用等。
免费提供一些解决方案、行业报告、PPT、电子书、手册、技术资料等干货(目前30G+,并实时更新),全部可下载。

更多推荐
工厂规划方法流程:137页
最全提升机大盘点:12种!
2023年中国物流信息软件系统行业概览
AGV系统设计解析:布局-车体-对接-对接-数量计算-路径规划
建设“库架合一”立体库|你必须要知道的细节!
自动化箱式存储系统设计与系统构架
立体库的好基友|各类自动化输送系统
AGV智能仓储管理系统的设计思路
实例剖析--自动化立体库效率提升方案
货架计算与设计
收藏|堆垛机故障大全及解决办法
巷道堆垛机基本知识要点