第一章 工程师数学算法库之线性代数矩阵运算库Eigen的使用
现在有很多的科学计算软件,matlab,开源库。这些都是国外的,中国人能不能有自己的数学算法库呢?
工程师需要的是一个可以移植的算法库,而不太想了解库背后纷繁复杂的理论。我之后会开一个专栏,学习数学算法的同时分享这些算法,尽量让工程师拥有一个可以拿来就移植的算法包。> 2020/01/28 我可能太乐观了,重新实现一遍数学算法是不是太难了,意义也不大呢?对于工程师,最想要的是能直接拿来就能用的库,移植方便,算法效率高,最好不收费。
工程师数学算法库系列
第一章 工程师数学算法库之线性代数矩阵运算库Eigen的使用
目录
一、移植Eigen的方法
二、Eigen具有的具体功能
三、Eigen的详细介绍(包含对运行效率的分析)
3.1 矩阵数据类型
3.2 定义大矩阵的方法(行列大小大于16)
3.3 矩阵初始化方式
3.4 矩阵运算
3.5 矩阵分解(还需验证)
3.6 线性方程求解
3.7 欧拉角和四元数转化
四、使用的技巧和注意事项
五、致谢
前言:我所使用的Eigen版本是Eigen3.3.5,因此后面所有的代码示例和解释都是基于此的。时间:2020/01/28
一、移植Eigen的方法
我也是从这个csdn地址下载的,代码包下载地址:https://download.csdn.net/download/qq21497936/10800291
亲测可用!!!
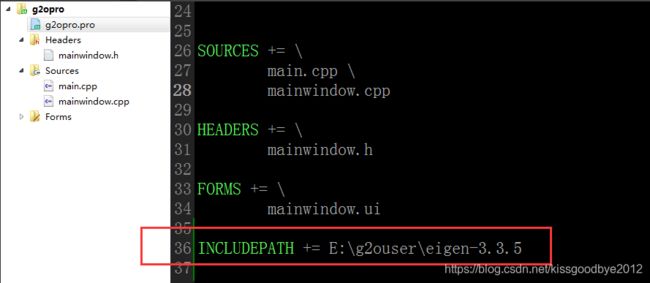
Eigen的移植非常简单,只需一步。随便将Eigen放置在任何位置,当然最好别有中文路径(我也没试过,最好别吧,外国的中文适配不是那么好)。移植方法:使用时将Eigen的头文件路径包含就行。
例子,QT里如下,其实就是让IDE可以找到你的头文件就行,这里真的感谢开源Eigen的作者们,真的方便!:
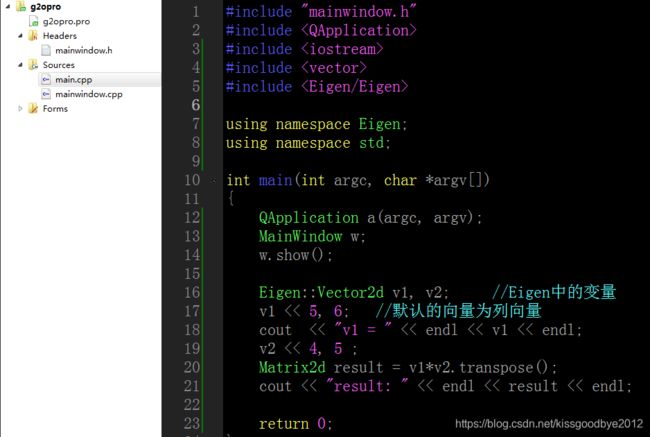
给大家一段验证是否移植好的代码,这个是转自博客:https://www.cnblogs.com/tornadomeet/archive/2012/12/11/2813842.html:
#include
#include
using namespace Eigen;
using namespace std;
int main(int argc, char *argv[])
{
Eigen::Vector2d v1, v2; //Eigen中的变量
v1 << 5, 6; //默认的向量为列向量
cout << "v1 = " << endl << v1 << endl;
v2 << 4, 5 ;
Matrix2d result = v1*v2.transpose();
cout << "result: " << endl << result << endl;
return 0;
} 二、Eigen具有的具体功能
Eigen的官网:http://eigen.tuxfamily.org/dox/group__TutorialMatrixClass.html
但官网好像转移到gitlab了,具体见官网上的公告。
讨论:
1.稠密矩阵是每个元素都存储的,而稀疏矩阵是将非零元素存储成一个表;
2.固定矩阵对于小矩阵非常适用(矩阵大小最大4X4,有时到16X16),在编译的时候就已知矩阵大小;而对于大矩阵,一般适用动态矩阵,即使编译时就知道矩阵大小;这里涉及内存大小的分配,对于动态矩阵,在堆中动态分配内存大小;
三、Eigen的详细介绍(包含对运行效率的分析)
前言:我的机器配置
用了多年的acer机(2012年买的),配置如下:

对于效率的计算,多次运算取最大时间为测试值。
3.1 矩阵数据类型
矩阵类如下,是一个模板类:
template
注意:
1.这个类不仅可以用于矩阵,也可用于行向量和列向量;
2.这个矩阵类也同时适合固定大小的矩阵和可变大小的矩阵;
参数说明,前三个参数是必须有的:
参数1,_Scalar:矩阵元素的数据类型,包括float, double, int or std::complex
参数2,_Rows: 矩阵的行数,可以为具体值,也可以动态指定;
参数3,_Cols: 矩阵的列数,可以为具体值,也可以动态指定;
预定义类型,就是常用的提前定义好的矩阵类,方便使用。
更多的预定义类型见:http://eigen.tuxfamily.org/dox/group__matrixtypedefs.html:
Matrix2d是一个 2x2 doubles类型方阵 (Matrix)Vector4f是一个大小为4的floats类型向量 (Matrix)RowVector3i是一个大小为3的int类型行向量 (Matrix)
MatrixXf是一个动态大小的floats类型矩阵(Matrix)VectorXf是一个动态大小的floats类型向量(Matrix)
Matrix2Xf是一个部分固定大小的floats类型矩阵 (Matrix)MatrixX3d是一个部分固定大小的double类型矩阵 (Matrix)
注意:这些预定义类的命名空间为Eigen,使用的时候如下图所示。如果加了using namespace Eigen;也可以不加前面的Eigen:。
3.2 定义大矩阵的方法(行列大小大于16)
根据前面3.1的介绍,去定义一个m x n的矩阵其实是一件非常容易的事。但我们定义的矩阵是要进行运算的,直接定义一个大矩阵非常容易造成内存超限(栈溢出),这个时候可以通过定义动态矩阵的方法,避免这个问题。动态矩阵在赋值或者运算的时候,自动产生对应的维数大小。
注意:动态矩阵在赋值后,运算过程中矩阵大小也是可以变化的。也就是说,一旦定义为动态矩阵,它的维度就是随时可变的。
例如,先前我们创建的如下面形式的矩阵:
Eigen::Matrix matrix_NN; 改成动态矩阵的形式:
Eigen::Matrix matrix_NN;
matrix_NN = Eigen::MatrixXd::Random(500, 500);
//或者更加一般的赋值方法如下
Matrix a;
double t[] = {1,2,3,4};
a= Map >(t);//RowMajor代表行优先 3.3 矩阵初始化方式
(1)随机值初始化矩阵
Matrix p=Matrix::Random();//一般的矩阵随机初始化
matrix_NN = Eigen::MatrixXd::Random(500, 500);//动态矩阵随机初始化 (2)单位矩阵初始化矩阵
Matrix p=Matrix::Identity(5);//定义并初始化矩阵
std::cout << matrix_NN << std::endl;//显示矩阵 (3)零矩阵初始化矩阵
Matrix p=Matrix::Zero();//定义并初始化矩阵
std::cout << p << std::endl;//显示矩阵
matrix_NN = Eigen::MatrixXd::Zero(500, 500); (4)用指定值初始化矩阵
Matrix p=Matrix::Constant(5);//定义并初始化矩阵
std::cout << p << std::endl;//显示矩阵 (5) 矩阵赋值
方法1:逗号初始化
Eigen提供了逗号操作符允许我们方便地为矩阵/向量/数组中的元素赋值。按从左到右,从上到下的顺序列出所有元素,并用逗号进行分隔。需要注意的是,对象的尺寸需要事先指定,而且所列出的元素数目要和操作对象的尺寸大小一致。
注意:
1. 这样赋值一定要完成赋值充分,不能留几个元素不赋值,否则计算会报错:初始化未完成,结果是末尾会补零进行计算。
Matrix2d a;
a << 1, 2, 3, 4;
MatrixXd b(2,2);
b << 2, 3, 1, 4;2. 不仅可以用数值进行赋值,还可以通过多个向量进行赋值,如下:看最后一个joined矩阵,是用两个向量来赋值的
RowVectorXd vec1(3);
vec1 << 1, 2, 3;
std::cout << "vec1 = " << vec1 << std::endl;
RowVectorXd vec2(4);
vec2 << 1, 4, 9, 16;
std::cout << "vec2 = " << vec2 << std::endl;
RowVectorXd joined(7);
joined << vec1, vec2;
std::cout << "joined = " << joined << std::endl;
3. 还可以通过矩阵块来进行赋值,就像拼图一样,哈哈
MatrixXf matA(2, 2);
matA << 1, 2, 3, 4;
MatrixXf matB(4, 4);
matB << matA, matA/10, matA/10, matA;
std::cout << matB << std::endl;
结果如下:
1 2 0.1 0.2
3 4 0.3 0.4
0.1 0.2 1 2
0.3 0.4 3 44.还可以通过块表达式进行赋值(这个还不太懂)(还需验证)
Matrix3f m;
m.row(0) << 1, 2, 3;
m.block(1,0,2,2) << 4, 5, 7, 8;
m.col(2).tail(2) << 6, 9;
std::cout << m;
结果如下:
1 2 3
4 5 6
7 8 9
3.4 矩阵运算
(1)矩阵加减法
直接加和减就行,但得注意矩阵行列数得相同,否则程序会报错。报错也会有结果输出,这个结果是按照最小行列数的矩阵来计算的,不足的会补零。
Matrix2d a;
a << 1, 2,
3, 4;
MatrixXd b(2,2);
b << 2, 3,
1, 4;
std::cout << "a + b =\n" << a + b << std::endl;
std::cout << "a - b =\n" << a - b << std::endl;加法的计算效率结果如下(减法的没测,2000那组结果差不多),单位ms,注意200 x 200的时候程序已经提示矩阵过大,后来改用动态矩阵了:
| ACER | 小新潮7000 | 华硕电脑 | |
|---|---|---|---|
| 2 X 2 | 0 | ||
| 20 X 20 | 0 | ||
| 200 X 200 | 3 | ||
| 2000 X 2000 | 128 |
(2)矩阵乘法
Matrix a;
double t[] = {1,2,3,4};
a= Map >(t);
Matrix b;
double tt[] = {2,3,4,5};
b= Map >(tt);
std::cout << "a * b =\n" << a * b << std::endl; 乘法的计算效率结果如下,单位ms,采用动态矩阵:
| ACER | 小新潮7000 | 华硕电脑 | |
|---|---|---|---|
| 2 X 2 | 0 | ||
| 20 X 20 | 1 | ||
| 200 X 200 | 227 | ||
| 2000 X 2000 | 超长时间 |
(3)求矩阵行列式
double p=a.determinant();(4)求逆矩阵,伴随矩阵,矩阵转置(还需验证)
std::cout << "p=\n" << a.transpose() << std::endl;//转置矩阵
std::cout << "p=\n" << a.adjoint() << std::endl;//伴随矩阵
std::cout << "p=\n" << a.inverse() << std::endl;//逆矩阵(5)求矩阵特征值(还需验证)
MatrixK= MatrixXd::Random(4,4);
EigenSolver> es(K);
MatrixXcd evecs = es.eigenvectors();//获取矩阵特征向量4*4,这里定义的MatrixXcd必须有c,表示获得的是complex复数矩阵
MatrixXcd evals = es.eigenvalues();//获取矩阵特征值 4*1
MatrixXd evalsReal;//注意这里定义的MatrixXd里没有c
evalsReal=evals.real();//获取特征值实数部分
MatrixXf::Index evalsMax;
evalsReal.rowwise().sum().maxCoeff(&evalsMax);//得到最大特征值的位置
Vector4d q;
q << evecs.real()(0, evalsMax), evecs.real()(1, evalsMax), evecs.real()(2, evalsMax), evecs.real()(3, evalsMax);//得到对应特征向量 3.5 矩阵分解(还需验证)
分解一:Cholesky分解
x3 = (A.transpose()*A).llt().solve(A.transpose()*b); //方法3:choleskey分解。分解二:LU三角分解
分解三:QR分解
分解四:奇异值分解
分解五:LDLT分解
#include
#include
#include
#include
#include
using namespace std;
using namespace Eigen;
#define MATRIX_SIZE 100
int main()
{
//方程组形式Ax = b;(假定A是方阵)
Matrix A;
A = MatrixXd::Random(MATRIX_SIZE,MATRIX_SIZE);
Matrix b;
b = MatrixXd::Random(MATRIX_SIZE,1);
Matrix x1;
Matrix x2;
Matrix x3;
Matrix x4;
clock_t time_stt = clock();
x1 = A.inverse()*b; //方式1:直接求逆求解x = A的逆 * b
cout<<"x1 time is:"<<1000*(clock()-time_stt)/(double)CLOCKS_PER_SEC<<"ms"< 3.6 线性方程求解
//计算Ax=b;
Eigen::Matrix3d A;
A<<1,1,1,1,2,3,3,2,3;
Eigen::Matrix b;
b<<3,6,8;
cout<<"行列式为:"<3.7 欧拉角和四元数转化
(1)欧拉角转四元数
先旋转x轴,然后旋转y轴,最后旋转z轴,对应的旋转角分别为rx, ry, rz,即ea[2] ea[1] ea[0]
q = Eigen::AngleAxisd(ea[0], ::Eigen::Vector3d::UnitZ()) *
Eigen::AngleAxisd(ea[1], ::Eigen::Vector3d::UnitY()) *
Eigen::AngleAxisd(ea[2], ::Eigen::Vector3d::UnitX());
(2)四元数转欧拉角
按照先旋转x轴(0),然后y轴(1),最后z轴得到的角度,并不是传统意义上,zyx旋转的欧拉角。
得到的ea向量,分别对应的是rz, ry, rx旋转角度,注意和下文的顺序对应
另外这里得到的角度,归一化的范围有些问题,代码中的说明是
The returned angles are in the ranges [0:pi] x [-pi:pi] x [-pi:pi].
所以,这里的rz角范围可能有问题,需要注意
Eigen::Quaterniond q(w, x, y, z);
Eigen::Matrix3d rx = q.toRotationMatrix();
Eigen::Vector3d ea = rx.eulerAngles(2,1,0);
四、使用的技巧和注意事项
五、致谢
感谢下面这些博客提供的参考
矩阵初始化相关:https://blog.csdn.net/wangxiao7474/article/details/103520425
动态矩阵赋值相关:https://blog.csdn.net/sinat_28751869/article/details/79425491
矩阵的特征值相关:https://blog.csdn.net/wcsgzc/article/details/53946345
四元数和欧拉角相关:
https://blog.csdn.net/heroacool/article/details/103288585
https://blog.csdn.net/DaqianC/article/details/81474338