【最短路算法】一篇文章彻底弄懂Dijkstra算法|多图解+代码详解

- 博主简介:努力学习的大一在校计算机专业学生,热爱学习和创作。目前在学习和分享:算法、数据结构、Java等相关知识。
- 博主主页: @是瑶瑶子啦
- 所属专栏: 算法 ;该专栏专注于蓝桥杯和ACM等算法竞赛
- 近期目标:写好专栏的每一篇文章

目录
- 一、简介
- 二、基本思想策略
- 三、代码实现
-
-
-
- 输入格式
- 输出格式
- 数据范围
-
- 3.1伪代码详解
- 3.2源代码详解
- 3.4:数据结构优化
- 3.3:算法分析
-
- 四、使用小根堆来优化Dijkstra算法
- 五、深入和反思
一、简介
Dijkstra算法适用于最短路问题中,单源最短路(只有一个起点),并且每条边的权重都是正数的情况
二、基本思想策略
首先假定源点为u(就是起点),顶点集合V被划分为两部分:集合 S 和 V-S。 初始时S中仅含有源点u,其中S中的顶点到源点的最短路径已经确定。
集合S 和V-S中所包含的顶点到源点的最短路径的长度待定,称从源点出发只经过S中的点到达V-S中的点的路径为特殊路径(不一定是最短的)
并用dist[]记录当前每个顶点对应的最短特殊路径长度。
红色顶点是S集合中,均已经确定最短路径的点,而绿色的是V-S集合中没有确定该顶点到源点最短路径的点。我们可以看到只经过S中的点到绿色点有两条特殊路径:
15+20和20+10,但是只有一条最短路径:15+20,那么绿色点就当前情况来看,可以暂时把它的dist[i]更新为25,但是一定是最短特殊路径吗?不一定,为什么呢?我们接下来往下看
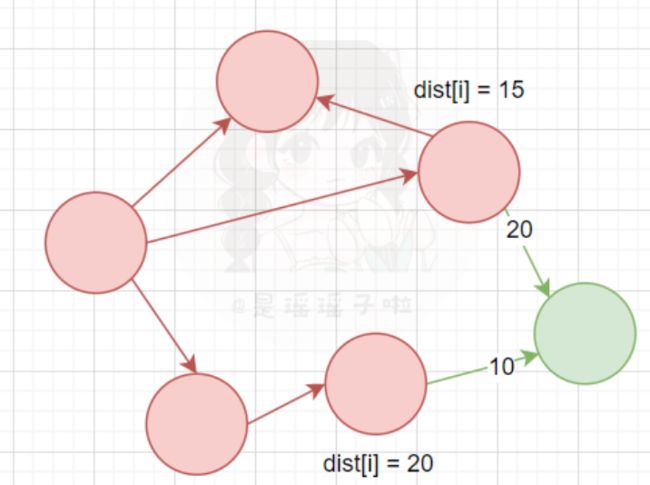
可以看到,V-S集合中假设存在一点T,经过这点到目的点的距离,很有可能是目的点真正的dist!

可能这里可能有点晕,没错。上面只是一个大概的介绍,我们接下来彻底揭开它的神秘面纱。
选择特殊路径长度最短的路径,将其连接的V-S中的顶点加入到集合S中,同时更新数组dist[](核心)。一旦S包含了所有顶点,dist[]就是从源到所有其他顶点的最短路径长度。
数据结构: h[N],e[M],ne[M],w[M]构建带权重的邻接表,来存储图;int dist[N];//dist 数组保存源点到其余各个节点的距离
(1)初始化。令集合S={0},对于集合V-S中的所有顶点x{1,2,3…n};初始化dist数组memset(dist, 0x3f, sizeof(dist));//dist 数组的各个元素为无穷大,
(2)找最小。在集合V-S中依照贪心策略来寻找使得dist[j]具有最小值的顶点t,即dist[t]=min,则顶点t就是集合V-S中距离源点u最近的顶点。
(3)加入S战队。将顶点t加入集合S,同时更新V-S
(4)借东风。在(2)中已近找到了源点到t的最短路径,那么对集合V-S中所有与顶点t相邻的顶点j,都可以借助t走捷径。
如果dist[i] = min(dist[i], dist[t] + w[j]);//更新 dist[j],转(2)。
光凭这个好像是这么回事,但是细节值得推敲。这个题的本质还是贪心。
比如只看刚刚的文字,不仔细分析,你能不能解决我开头提出的那个问题?
为什么这么说呢。因为在目前(局部情况)来看,确实找到最短特殊路径了,竟然就直接加入S战队,不太可取,就像我开头提出的,在V-S集合中,万一存在一个点,经过这个点再到目的点,很有可能才是真正的最短距离。
那为什么这个算法是可取的呢?
巧就巧在,最外层循环,遍历了整个顶点,并且并不是说,一旦该顶点加入了S战队,它的dist就不能变了,相反,它在实时更新!。当循环遍历到绿色顶点T时,会更新与它相连节点的dist。
不知道有没有get到我的意思,虽然我没有用公式啥的去推导,我个人也非常讨厌那种不人性化的方式,更喜欢用一种形象的,意会的方式去理解。
综上,由局部最优,到全局最优,这种贪心的策略,完全可以保证全部遍历和循环后,dist[]数组中存的就是该点到源点的最短距离!!!(上面是我个人的理解,欢迎一起讨论交流和学习捏!)
三、代码实现
这里是AcWing 849.Dijkstra求最短路 I模板题目
给定一个 n 个点 m 条边的有向图,图中可能存在重边和自环,所有边权均为正值。
请你求出 1 号点到 n 号点的最短距离,如果无法从 1 号点走到 n 号点,则输出 −1。
输入格式
第一行包含整数 n 和 m。
接下来 m 行每行包含三个整数 x,y,z,表示存在一条从点 x 到点 y 的有向边,边长为 z。
输出格式
输出一个整数,表示 1 号点到 n 号点的最短距离。
如果路径不存在,则输出 −1。
数据范围
1≤n≤500,
1≤m≤105,
图中涉及边长均不超过10000。
3.1伪代码详解
int dist[N],state[N];
dist[1] = 0,state = 1;//把源点加入S集合
for (i : 1~n)
{
1),t<-找最小,找到只经过S中的点到V-S集合中某一点,距离最小的那个V-S中的那个点
2),state[t] = 1;将t加入到S战队
3),更新与t顶点相邻点的dist
}
3.2源代码详解
#include关于存储图的适合,没有考虑重边和自环的影响?
因为在第三步更新的时候,即使邻接表那条单链上有两个一样编号的节点,但是第三步更新的时候,还是会让对应编号节点的dist为最小。所以即使有重边也不影响
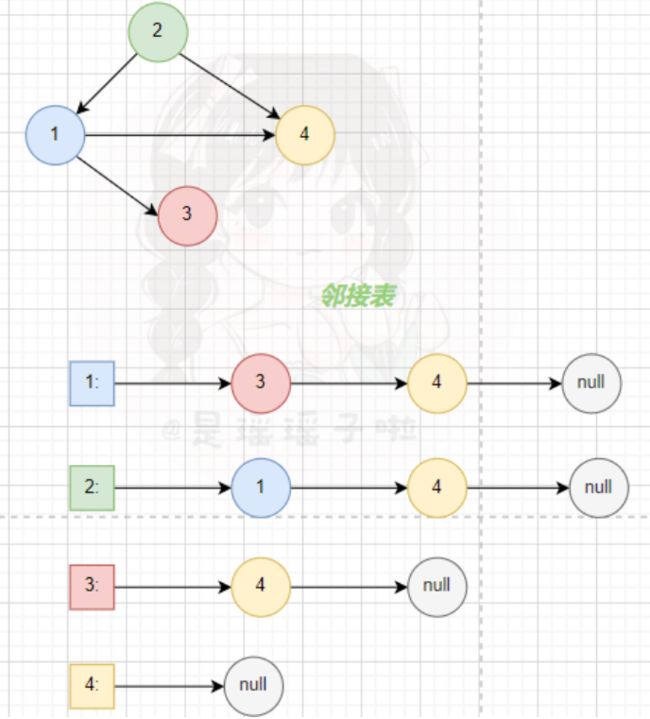
3.4:数据结构优化
上面我们是采用邻接表来存储图,邻接表的原理如下。邻接表是适合稀疏图,当边比较多,也就是稠密图时,我们采用邻接矩阵来存储图。即g[a][b]的值为编号为a的节点a到编号为b的节点b之间的距离。
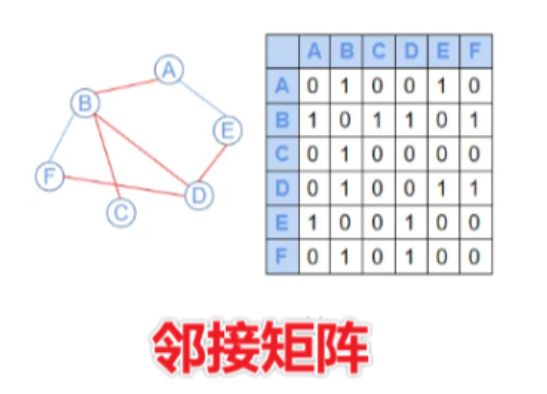
使用邻接矩阵,注意去重边,因为邻接矩阵只允许a→b的距离唯一。
#include 3.3:算法分析
算法时间复杂度:时间复杂是 O(n2+m)O(n2+m), n 表示点数,m表示边数
耗时的主要地方在于第2)步,找最小,每次都需要遍历一遍dist数组,完全没有必要。可以使用小根堆来优化(小根堆的数据结构可以自己来实现(推荐),或者用库中的)
四、使用小根堆来优化Dijkstra算法
这个定义的heap,完全可以看作集合V-S的具体化!通过这个小根堆,可以直接取出(取出+删除)V-S集合的最小值。
#include 使用小根堆后,找到 t 的耗时从 O(n^2) 将为了 O(1)。每次更新 dist 后,需要向堆中插入更新的信息。所以更新dist的时间复杂度有 O(e) 变为了 O(elogn)。总时间复杂度有 O(n^2) 变为了 O(n + elongn)。适用于稀疏图。
五、深入和反思
最开始我们说到,Dijkstra算法只适用于边的权重都是正数的情况。为什么负权边不行呢?
看一个Dijkstra算法失效的例子:
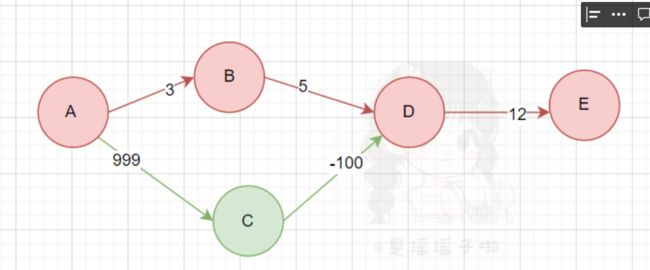
A→B→D→E,确定dist[E]=20,dist[D]=8
然后A→C→D虽然更新了D点的dist,使之正确dist[D]=-1,但是由于D已经被遍历过,无法通过D来更新E,导致最终求出的A→E的最小距离出错。
为什么呢?
D的dist的正确性不受负权的影响,是因为负权指向的是D,在更新节点,更新dist的时候,会更新掉D的错误值。但E就不一样了,在当前局部,只有D一个经过它,D一旦遍历过后,更新了E。当经过C到D时,无法再通过正确的D去更新E!
如果全部是正值的话,在A→D时,能一下子确定当前真正的dist[D]!再dist[D]+12,那dist[E]也是正确的!
所以根本原因在于,存在负权边,dist[D]的真值不能在更新dist[E]之前确定。
最后是我个人总结的理解:
在Dijkstra算法视角,把B遍历并进行相关更新后,它当前得知了如下情况:dist[A] = 0,dist[B] = 2,dist[D] = 5,dist[C] = 999,dist[D] = 999+C,C>0,Dijkstra当然会放弃A-C-D这条路,可是C其实<0,这条路不该被放弃,反而A-C-D的路径长度很有可能会小于A-B-C的长度,正是由于Dijkstra的这点输入,导致出现负权边时,结果不正确,再说,人家的正确性本来就是建立在所有边的权重都>0的基础上!
- Java岛冒险记【从小白到大佬之路】
- LeetCode每日一题–进击大厂
- 算法