激光雷达A1M8与STM32通信
我与SLAM激光雷达的CEO有联系方式,他人很好哦!!!
你可以通过给我的Github项目点赞来获取一些帮助
Github项目地址
文章内容:
思岚激光雷达M8A1使用STM32F407来做初步的数据观测。
注:由于激光雷达发送数据量十分之大,因此使用串口来做测距与测角度得到的与当前值的偏差较大,因此本文只是初步介绍。
若需要解算出精确数据则需要使用DMA,我将在之后的文章使用DMA来解算数据,敬请期待!
文章包含:
1>使用串口发送数据来启动激光雷达旋转.
2>再串口打印出具体的十六进制距离和角度数据
学习目标:
通过本文初步了解激光雷达如何使用STM32来做到测距测角度。
学习内容:
1>配置串口
2>配置PWM
3>串口发送数据给激光雷达
4>配置占空比来使激光雷达旋转



途中已经表示出激光雷达的串口协议。我们只需按照要求配置串口即可。
激光雷达在只为了测算距离和角度时不需要配置双串口,但由于本文目的是为了让大家能在串口处看到激光雷达返回的数据,因此需要第二个串口来打印出返回数据。
UART串行通信是按照一个字节一个字节传输的,每个字节之间至少有一个停止位,对于Standard模式下的数据流,每5个字节构成一组 描述一个激光点,每一组数据之间会有微弱的时间间隔。
注:本文使用串口1与串口6,也可使用其他串口.以及我是用的是CH340串口工具,接线在接下来提出。
代码讲解:
1> 串口1的配置
#include "sys.h"
#include "usart.h"
#include "led.h"
#include "delay.h"
#if SYSTEM_SUPPORT_UCOS //时钟配置
#include "includes.h" //ucos 使用
#endif
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
int _sys_exit(int x)
{
x = x;
}
//重定义fputc函数
//使串口1能使用printf函数
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//循环发送,直到发送完毕
USART1->DR = (u8) ch;
return ch;
}
#endif
#if EN_USART1_RX //如果使能了接收
//串口1中断服务程序
//注意,读取USARTx->SR能避免莫名其妙的错误
u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART_RX_STA=0; //接收状态标记
u8 RX_buffer[5]={0};
//初始化IO 串口1
//bound:波特率
void uart_init(u32 bound) //串口1
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//使能USART1时钟
//串口1对应引脚复用映射
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1); //GPIOA9复用为USART1
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1); //GPIOA10复用为USART1
//USART1端口配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //GPIOA9与GPIOA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA9,PA10
//USART1 初始化设置
USART_InitStructure.USART_BaudRate = bound;//波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_Cmd(USART1, ENABLE); //使能串口1
USART_ClearFlag(USART1, USART_FLAG_TC);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启相关中断
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//串口1中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器、
}
void USART1_IRQHandler(void) //串口1中断服务函数
{
printf("distance=%d\n",distance);
printf("angle=%d\n",angle);
}
2>串口6配置
void init(u32 bound) //串口6
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC,ENABLE); //使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART6,ENABLE);//使能USART1时钟
//串口1对应引脚复用映射
GPIO_PinAFConfig(GPIOC,GPIO_PinSource6,GPIO_AF_USART6); //GPIOC6复用为USART6
GPIO_PinAFConfig(GPIOC,GPIO_PinSource7,GPIO_AF_USART6); //GPIOC7复用为USART6
//USART1端口配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7; //GPIOC6与GPIOC7
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOC,&GPIO_InitStructure); //初始化PA9,PA10
//USART1 初始化设置
USART_InitStructure.USART_BaudRate = bound;//波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART6, &USART_InitStructure); //初始化串口1
USART_Cmd(USART6, ENABLE); //使能串口1
USART_ClearFlag(USART6, USART_FLAG_TC);
USART_ClearFlag(USART6, USART_FLAG_RXNE);
USART_ITConfig(USART6, USART_IT_RXNE, ENABLE);//开启相关中断
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART6_IRQn;//串口1中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =2; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器、
}
u8 jp=0; //声明一个变量用于存储数据
void USART6_IRQHandler(void) //串口6中断服务程序
{
if(USART_GetITStatus(USART6, USART_IT_RXNE) != RESET)
{
RX_buffer[jp]=USART_ReceiveData(USART6);
jp++;
if(jp%5==0) //确保收到了完整的一组5个数据后才开始解算数据
{
distance=(RX_buffer[2]<<8|RX_buffer[1])/0X04;
angle=(RX_buffer[4]<<8|RX_buffer[3]>>1)/0X80;
//printf("distance=%d\n",distance); 距离角度等数据通过串口1打印
//printf("angle=%d\n",angle);
jp=0;
delay_ms(50); //由于32算力不够,且数据量过大,选择延迟一定时间来漏掉一些数据,
//是否需要可看自己
}
}
}
至此,串口配置完成,接下来开始PWM的配置。
我使用的是TIM1的定时器,时钟频率为168MHz.
3>PWM配置
代码如下:
void RIGHT_PWM_Init(u32 arr,u32 psc) //激光雷达旋转
{
//此部分需手动修改IO口设置
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE); //TIM14时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE); //使能PORTF时钟
GPIO_PinAFConfig(GPIOA,GPIO_PinSource6,GPIO_AF_TIM1); //GPIOF9复用为定时器1
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //GPIOF8
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PF8
TIM_TimeBaseStructure.TIM_Prescaler=psc; //定时器分频
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseStructure.TIM_Period=arr; //自动重装载值
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM1,&TIM_TimeBaseStructure);//初始化定时器13
//初始化TIM13 Channel1 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //输出极性:TIM输出比较极性低
TIM_OC1Init(TIM1, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM1 4OC1
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); //使能TIM14在CCR1上的预装载寄存器
TIM_ARRPreloadConfig(TIM1,ENABLE);//ARPE使能
TIM_Cmd(TIM1, ENABLE); //使能TIM14
}
4>串口6发送启动激光雷达的数据
{
USART_ClearFlag(USART6,USART_FLAG_TC);
if(1)
{ USART_SendData(USART6,0xA5); //从串口1发送开始指令 USART_FLAG_TC: 发送移位寄存器发送完成标志位,全部发送完毕会置 1
while(USART_GetFlagStatus(USART6,USART_FLAG_TC)!=SET);//等待发送结束
USART_SendData(USART6,0x20); //从串口1发送结束指令
while(USART_GetFlagStatus(USART6,USART_FLAG_TC)!=SET);//等待发送结束
}
}
5>主函数配置(波特率选择以及PWM频率配置)
#include "sys.h"
#include "delay.h"
#include "usart.h" //串口1 6配置
#include "led.h" //pwm和激光雷达初始化
u16 distance; //距离
u8 angle; //角度
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2
delay_init(168); //延时初始化
LidarInit(); //初始化激光雷达
uart_init(115200); //串口1
init(115200); //串口6
RIGHT_PWM_Init(2500-1,168-1); //PA8 1000000/5000=2000;
//每一秒能计数250/1000000=1/4000,也就是1s能进入4000次更新,250us进入一次更新
while(1)
{
}
}
至此,代码部分结束。现在来接线。
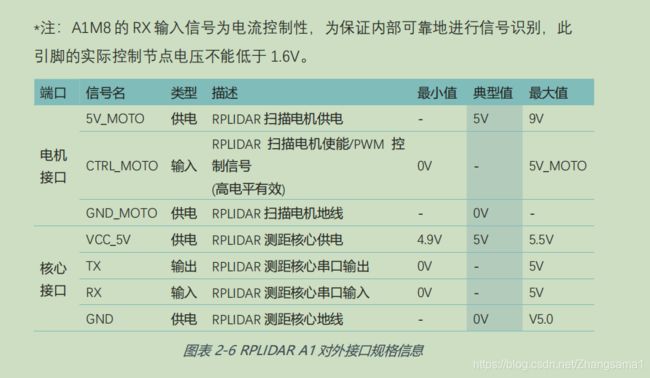
图中可以观察到激光雷达的电压供给为5V,因此我们需要接在STM32F407的5V接口上且需要两个,但这样做并满足不了电流的要求,因此需要为STM32接上一根供电线。
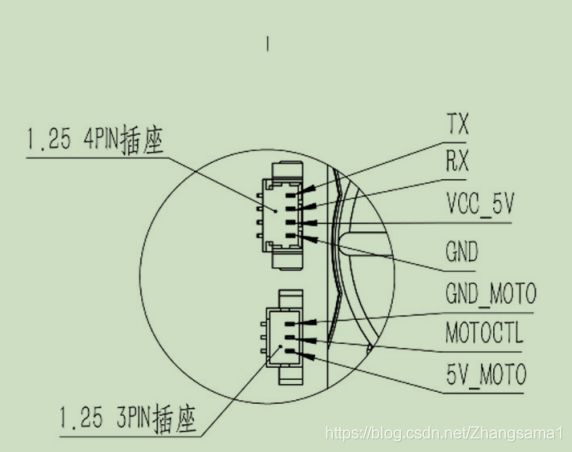
接线:
TX与PC7连接
RX与PC6连接
VCC_5V,5V_MOTO与5V连接
GND,GND_MOTO与GND连接
MOTOCTL与PA8连接

上图为CH340,通过杜邦线连接GND,RXD,TXD,3.3V到STM32上完成与STM32的连接,并将另一头与电脑连接。
至此,所有接线也完成,此时发现激光雷达开始旋转。
之后便是使用SSCOM,这一部分不多讲解,之后便会发现串口工具疯狂打印数据。
至此,全部结束。
如果不满足于使用串口来做距离和角度测算的,可以使用DMA,若有机会我会使用DMA来讲解激光雷达。
敬请期待!