vs2019+openvino部署yolov5目标检测流程+bug解决
背景:
项目需要利用c++部署yolov5的.pt文件 尝试intel厂商的openvino套件
版本:
vs2019
openvino==2022.3(只用部署所以只下载runtime)
opencv==4.5.5 (模型部署的前处理和后处理)
流程:
一、软件下载
opencv的下载
链接:Releases · opencv/opencv (github.com)
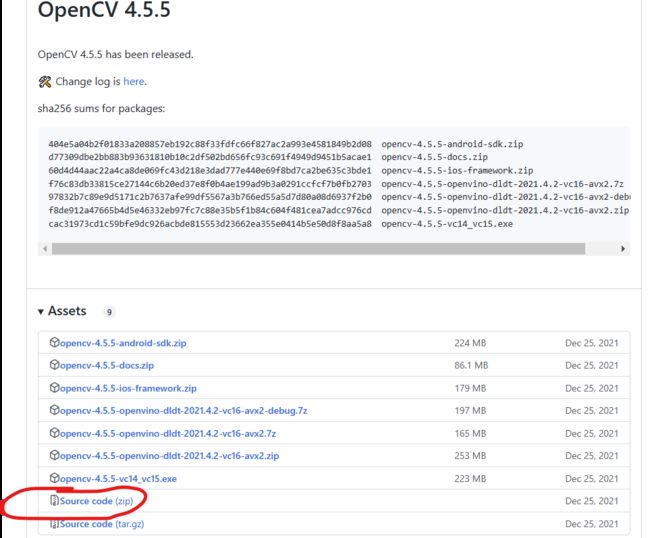
下载后进行解压
openvino下载
链接:下载英特尔® 发行版 OpenVINO™ 工具套件 (intel.cn)
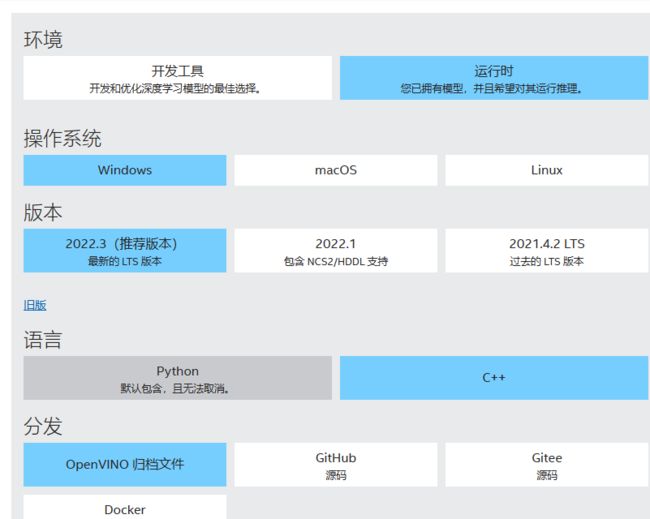
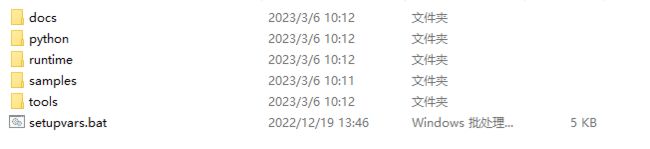
下载后同样解压,出现下面文件内容证明下载正确
vs2019下载(网上搜索)
二、环境配置(主要配置release,debug同理)
opencv的环境配置
网上有教程
openvino的环境配置
在vs2019中的属性包含目录中添加以下内容

属性库目录中包含以下内容
附加依赖项中添加以下内容
openvino.lib
openvino_c.lib
openvino_onnx_frontend.lib
openvino_paddle_frontend.lib
openvino_tensorflow_frontend.lib
此时openvino配置完成
三、模型导出,直接通过yolov5的export.py导出
注意将opset版本改为10
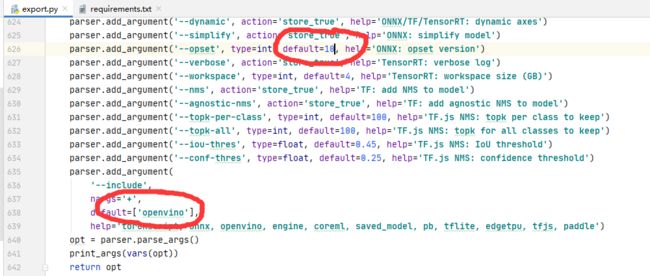
导出后会得到以下文件
四、编程推理
用vs2019创建一个控制台程序
将推理文件放入到程序文件夹下,下边放出yolov5推理文件夹内的图片并输出测试时间程序
yolo_openvino.h
#pragma once
#pragma once
#include
#include
#include
using namespace std;
class YOLO_OPENVINO
{
public:
YOLO_OPENVINO();
~YOLO_OPENVINO();
public:
struct Detection
{
int class_id;
float confidence;
cv::Rect box;
};
struct Resize
{
cv::Mat resized_image;
int dw;
int dh;
};
Resize resize_and_pad(cv::Mat& img, cv::Size new_shape);
void yolov5_compiled(std::string xml_path, ov::CompiledModel& compiled_model);
void yolov5_detector(ov::CompiledModel compiled_model, cv::Mat input_detect_img, cv::Mat output_detect_img, vector& nms_box);
private:
const float SCORE_THRESHOLD = 0.4;
const float NMS_THRESHOLD = 0.4;
const float CONFIDENCE_THRESHOLD = 0.1;
//vectorimages;//图像容器
//vector boxes;
//vector class_ids;
//vector confidences;
//vectoroutput_box;
Resize resize;
};
yolo_openvino.cpp
#include"yolo_openvino.h"
YOLO_OPENVINO::YOLO_OPENVINO()
{
}
YOLO_OPENVINO::~YOLO_OPENVINO()
{
}
YOLO_OPENVINO::Resize YOLO_OPENVINO::resize_and_pad(cv::Mat& img, cv::Size new_shape)
{
float width = img.cols;
float height = img.rows;
float r = float(new_shape.width / max(width, height));
int new_unpadW = int(round(width * r));
int new_unpadH = int(round(height * r));
cv::resize(img, resize.resized_image, cv::Size(new_unpadW, new_unpadH), 0, 0, cv::INTER_AREA);
resize.dw = new_shape.width - new_unpadW;//w方向padding值
resize.dh = new_shape.height - new_unpadH;//h方向padding值
cv::Scalar color = cv::Scalar(100, 100, 100);
cv::copyMakeBorder(resize.resized_image, resize.resized_image, 0, resize.dh, 0, resize.dw, cv::BORDER_CONSTANT, color);
return resize;
}
void YOLO_OPENVINO::yolov5_compiled(std::string xml_path, ov::CompiledModel& compiled_model)
{
// Step 1. Initialize OpenVINO Runtime core
ov::Core core;
// Step 2. Read a model
//std::shared_ptr model = core.read_model("best.xml");
std::shared_ptr model = core.read_model(xml_path);
// Step 4. Inizialize Preprocessing for the model 初始化模型的预处理
ov::preprocess::PrePostProcessor ppp = ov::preprocess::PrePostProcessor(model);
// Specify input image format 指定输入图像格式
ppp.input().tensor().set_element_type(ov::element::u8).set_layout("NHWC").set_color_format(ov::preprocess::ColorFormat::BGR);
// Specify preprocess pipeline to input image without resizing 指定输入图像的预处理管道而不调整大小
ppp.input().preprocess().convert_element_type(ov::element::f32).convert_color(ov::preprocess::ColorFormat::RGB).scale({ 255., 255., 255. });
// Specify model's input layout 指定模型的输入布局
ppp.input().model().set_layout("NCHW");
// Specify output results format 指定输出结果格式
ppp.output().tensor().set_element_type(ov::element::f32);
// Embed above steps in the graph 在图形中嵌入以上步骤
model = ppp.build();
compiled_model = core.compile_model(model, "CPU");
}
void YOLO_OPENVINO::yolov5_detector(ov::CompiledModel compiled_model, cv::Mat input_detect_img, cv::Mat output_detect_img, vector& nms_box)
{
// Step 3. Read input image
cv::Mat img = input_detect_img.clone();
int img_height = img.rows;
int img_width = img.cols;
vectorimages;
vector boxes;
vector class_ids;
vector confidences;
if (img_height < 5000 && img_width < 5000)
{
images.push_back(img);
}
else
{
images.push_back(img(cv::Range(0, 0.6 * img_height), cv::Range(0, 0.6 * img_width)));
images.push_back(img(cv::Range(0, 0.6 * img_height), cv::Range(0.4 * img_width, img_width)));
images.push_back(img(cv::Range(0.4 * img_height, img_height), cv::Range(0, 0.6 * img_width)));
images.push_back(img(cv::Range(0.4 * img_height, img_height), cv::Range(0.4 * img_width, img_width)));
}
for (int m = 0; m < images.size(); m++)
{
// resize image
Resize res = resize_and_pad(images[m], cv::Size(640, 640));
// Step 5. Create tensor from image
float* input_data = (float*)res.resized_image.data;//缩放后图像数据
ov::Tensor input_tensor = ov::Tensor(compiled_model.input().get_element_type(), compiled_model.input().get_shape(), input_data);
// Step 6. Create an infer request for model inference
ov::InferRequest infer_request = compiled_model.create_infer_request();
infer_request.set_input_tensor(input_tensor);
//计算推理时间
auto start = std::chrono::system_clock::now();
infer_request.infer();
auto end = std::chrono::system_clock::now();
std::cout << std::chrono::duration_cast(end - start).count() << "ms" << std::endl;
//Step 7. Retrieve inference results
const ov::Tensor& output_tensor = infer_request.get_output_tensor();
ov::Shape output_shape = output_tensor.get_shape();
float* detections = output_tensor.data();
for (int i = 0; i < output_shape[1]; i++)//遍历所有框
{
float* detection = &detections[i * output_shape[2]];//bbox(x y w h obj cls)
float confidence = detection[4];//当前bbox的obj
if (confidence >= CONFIDENCE_THRESHOLD) //判断是否为前景
{
float* classes_scores = &detection[5];
cv::Mat scores(1, output_shape[2] - 5, CV_32FC1, classes_scores);
cv::Point class_id;
double max_class_score;
cv::minMaxLoc(scores, 0, &max_class_score, 0, &class_id);//返回最大得分和最大类别
if (max_class_score > SCORE_THRESHOLD)//满足得分
{
confidences.push_back(confidence);
class_ids.push_back(class_id.x);
float x = detection[0];//框中心x
float y = detection[1];//框中心y
float w = detection[2];//49
float h = detection[3];//50
float rx = (float)images[m].cols / (float)(res.resized_image.cols - res.dw);//x方向映射比例
float ry = (float)images[m].rows / (float)(res.resized_image.rows - res.dh);//y方向映射比例
x = rx * x;
y = ry * y;
w = rx * w;
h = ry * h;
if (m == 0)
{
x = x;
y = y;
}
else if (m == 1)
{
x = x + 0.4 * img_width;
y = y;
}
else if (m == 2)
{
x = x;
y = y + 0.4 * img_height;
}
else if (m == 3)
{
x = x + 0.4 * img_width;
y = y + 0.4 * img_height;
}
float xmin = x - (w / 2);//bbox左上角x
float ymin = y - (h / 2);//bbox左上角y
boxes.push_back(cv::Rect(xmin, ymin, w, h));
}
}
}
}
std::vector nms_result;
cv::dnn::NMSBoxes(boxes, confidences, SCORE_THRESHOLD, NMS_THRESHOLD, nms_result);
std::vector output;
for (int i = 0; i < nms_result.size(); i++)
{
Detection result;
int idx = nms_result[i];
result.class_id = class_ids[idx];
result.confidence = confidences[idx];
result.box = boxes[idx];
nms_box.push_back(result.box);//传给Qt NMS后的box
output.push_back(result);
}
// Step 9. Print results and save Figure with detections
for (int i = 0; i < output.size(); i++)
{
auto detection = output[i];
auto box = detection.box;
auto classId = detection.class_id;
auto confidence = detection.confidence;
float xmax = box.x + box.width;
float ymax = box.y + box.height;
cv::rectangle(img, cv::Point(box.x, box.y), cv::Point(xmax, ymax), cv::Scalar(0, 255, 0), 3);
cv::rectangle(img, cv::Point(box.x, box.y - 20), cv::Point(xmax, box.y), cv::Scalar(0, 255, 0), cv::FILLED);
cv::putText(img, std::to_string(classId), cv::Point(box.x, box.y - 5), cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 0, 0));
}
img.copyTo(output_detect_img);
}
main.cpp
#include"yolo_openvino.h"
#include
#include
#include
using namespace cv;
using namespace std;
YOLO_OPENVINO yolo_openvino;
std::string path = "yolov5s_openvino_model/yolov5s.xml";
ov::CompiledModel model;
cv::Mat input_img, output_img;
vectoroutput_box;
int main()
{
String path1 = "./pic";//文件夹路径
vectorsrc_test;
glob(path1, src_test, false);//将文件夹路径下的所有图片路径保存到src_test中
if (src_test.size() == 0) {//判断文件夹里面是否有图片
printf("error!!!\n");
exit(1);
}
/* input_img = cv::imread("3.jpg");
yolo_openvino.yolov5_compiled(path, model);
yolo_openvino.yolov5_detector(model, input_img, output_img, output_box);*/
yolo_openvino.yolov5_compiled(path, model);
for (int i = 0; i < src_test.size(); i++) {//依照顺序读取文价下面的每张图片,并显示
int pos = src_test[i].find_last_of("\\");
std::string img_name(src_test[i].substr(pos + 1));
Mat frame = imread(src_test[i]);
yolo_openvino.yolov5_detector(model, frame, output_img, output_box);
for (int i = 0; i < output_box.size(); i++)
{
cv::rectangle(frame, cv::Point(output_box[i].x, output_box[i].y), cv::Point(output_box[i].x + output_box[i].width, output_box[i].y + output_box[i].height), cv::Scalar(0, 255, 0), 3);
}
output_box.clear();
cv::imwrite("./out/" + img_name, frame);
}
}
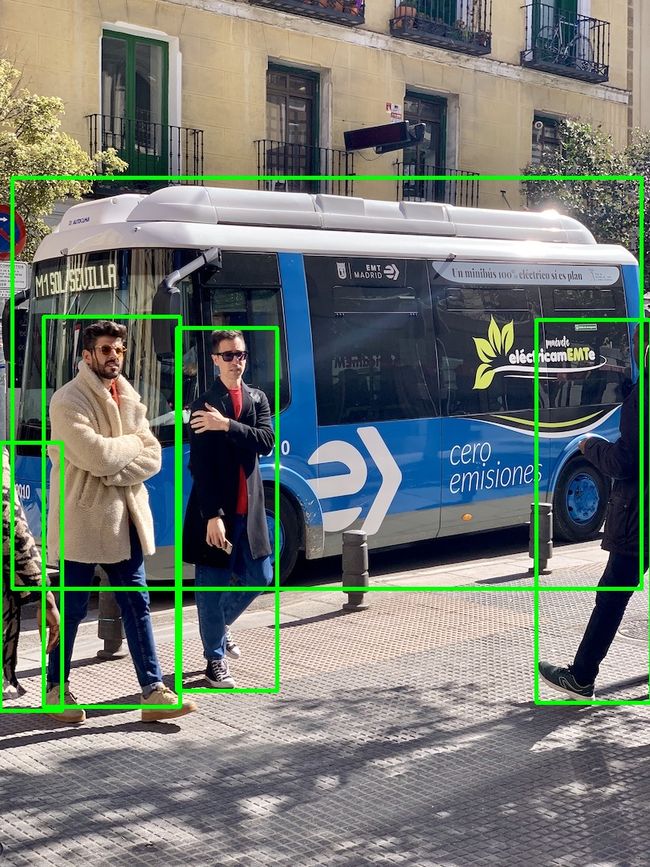
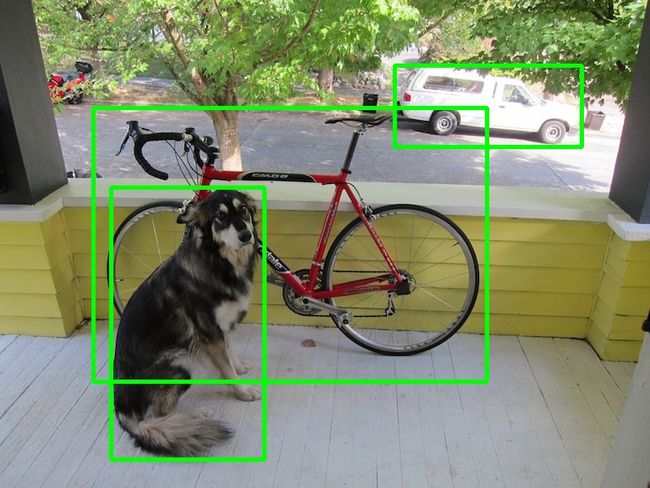
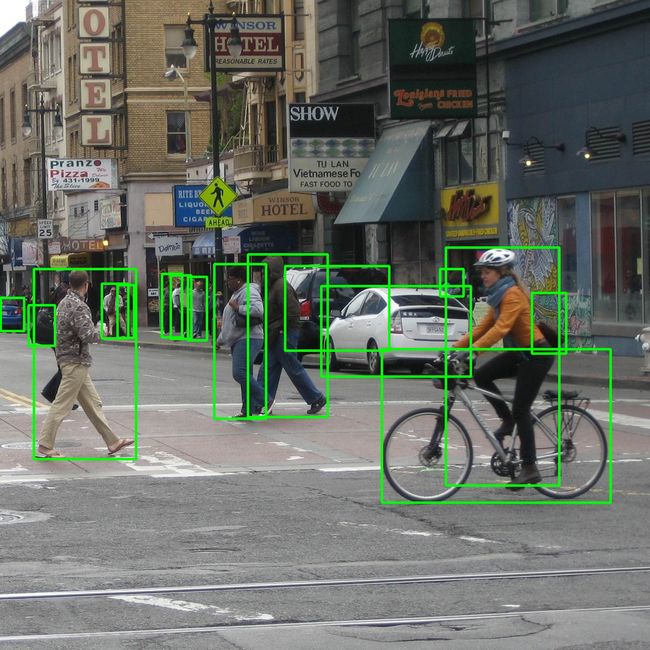
输出测试结果图:
针对其他需求可以自行修改代码。
在代码运行可能会出现一些丢失dll的bug 直接将openvino的dll放到文件夹下即可解决