c++_learning-并发与多线程
并发与多线程
- 并发:
- 进程:
- 线程:
-
- 基本概念:
- 线程安全:
-
- 问题出现的场景:
- 涉及的性质:
- 如何保证线程安全?
- 并发的实现手段(优先使用多线程并发):
-
- 多进程并发中,进程之间的通信IPC:
- 多线程并发,单进程中创建多个线程来实现并发:
- 线程的启动、结束和创建多线程的方法:
-
- 创建线程的要点:
-
- 给子线程入口函数传递参数时,要用值传递(不能用引用或者指针):
- 传递类对象、智能指针、类成员函数指针作为线程参数:
- 创建和等待多个线程:
-
- 将多个线程对象放入thread数组:
- 将多个线程对象放入容器:
- 互斥锁:
-
- 多个线程的数据共享:
-
- 数据共享问题分析:
- 解决的方法:引入互斥量mutex,
- c++11中提供四种互斥锁:
-
- mutex互斥锁:
- timed_mutex带超时机制的互斥锁:
- recursive_mutex递归互斥锁:
- recursive_timed_mutex带超时机制的递归互斥锁
- 互斥量mutex:
-
- 互斥量可以理解为一把锁:
- mutex类:
- C++中的死锁:
- `unique_lock`和`lock_guard`都是管理锁的辅助类:
-
- 为防止mutex加锁后忘记unlock(),引出std::lock_guard()类模板:
- 类模板unique_lock取代lock_guard:
-
- unique_lock和lock_guard的**异同点:**
- `unique_lock
- unique_lock的成员函数:
- unique_lock**所有权的转移**:
- 线程的移动和交换
- 单例设计模式共享数据的问题:
-
- 懒汉模式:
- “饿汉模式”线程安全:
- 条件变量:std::condition_variable、wait()、notify_one():
-
- 条件变量是一种线程同步机制:
- 常使用条件变量的场景:生产-消费者模型(高速缓存队列):
- c++11的`#include
`条件变量提供了两个类: -
- `condition_variable`:
-
- 成员函数:
- 当另一个线程的notify_one()函数将本线程中wait()函数激活后,
- `condition_variable_any`:
- std::async、std::future:创建后台任务并返回值:
- std::native_handle()函数:
- 原子类型`#include
`: -
- 原子操作介绍:
- 成员函数:
- 使用细节:
并发:
一个程序(单核CPU)通过操作系统的调度进行“任务切换”,从而同时执行多个独立的任务,即提高性能,可以同时干多个事,但切换需要时间的开销。
进程:
就是一个可执行程序运行起来了 windows(双击.exe文件)/linux(./文件名)。一个进程中有一个主线程,用来执行main函数中的代码。
线程:
基本概念:
- 除了主线程之外,可以通过写代码自己创建线程,每创建一个线程就多干一件事。
- 切换需要耗费时间的成本,所以并不是线程越多越好。
- 每个线程都需要一个独立的堆栈空间(1M),线程之间的切换需要保存很多中间状态。线程结束后,需要回收该线程的这些资源。
线程安全:
问题出现的场景:
- 同一个进程中的多个线程共享该进程的全部系统资源。
- 多个线程访问同一个共享资源时,会产生冲突。
涉及的性质:
顺序性:顺序执行代码。
- 存在的问题:为了提高程序运行效率,CPU可能会对代码进行优化,按更高效的顺序执行代码,而不一定是顺序执行,但执行结果与顺序执行的结果是一致的。
可见性:当多个线程并发访问共享变量时,一个线程对共享变量的修改,其他线程能够立即看到。
- 存在的问题:线程操作共享变量时,会将该变量从内存加载到CPU的缓存中,修改该变量后CPU会立即更新缓存,但不一定会立即将它写回内存中。此时,其他线程访问该变量,是从内存中得到的旧数据,而非第一个线程操作后的数据。
原子性:一个操作(可能包含多个步骤)要么全部执行,要么全部不执行。
- 存在的问题:CPU执行“读取指令、读取内存、执行指令、写回内存”的过程中,并不是一气呵成的,可能会被打断。
如何保证线程安全?
- volatile关键字:保证内存变量的可见性、禁止代码优化(重排序)。
- 原子操作(原子类型)。
- 线程同步(互斥锁)。
并发的实现手段(优先使用多线程并发):
多进程并发中,进程之间的通信IPC:
- 同一台电脑:管道(有名管道、无名管道)、文件、消息队列、共享内存。
- 不同的电脑:socket通信技术,即本地套接字。
多线程并发,单进程中创建多个线程来实现并发:
- 每一个进程中的所有线程共享地址空间(共享内存)(全局变量、指针、引用,都可以在线程之间传递;且开销比较小)。
- 共享内存带来的问题:数据一致性的问题。
线程的启动、结束和创建多线程的方法:
-
主线程是从main()函数开始执行的;子线程的执行也必须从一个函数开始;
-
当一个进程中,主线程执行结束后,如果子线程还没有结束会被操作系统强制终止。如果要保证子线程的运行状态,就必须保证主线程的运行状态,或者使用detach使子线程处于“分离状态”。
-
c++11标准线程库
#include,提高了移植性。其中,thread是一个标准库中的类,使用时要创建类对象。// 使用时,只是引用了地址并未发生拷贝动作 std::ref() // 给线程函数传递参数时,可通过此函数避免发生拷贝动作 /* 构造函数 */ // 1.默认构造函数,构造一个线程对象且不执行任何任务: thread() noexcept; // 2.创建线程对象,并在线程中执行任务函数 template<class Function, class... Args> explicit thread(Function&& fx, Args&&... args); // fx是任务函数,args是任务函数执行时需要的参数 // 任务函数可以是普通函数、类的静态成员函数、类的非静态成员函数、lambda表达式、仿函数 // 3.删除了拷贝构造函数,不允许线程对象之间的拷贝 thread(const thread&)=delete // 4.移动构造函数,将线程other的资源所有权转移给新创建的线程对象 thread(thread&& other) noexcept /* 赋值函数 */ // 左值的other禁止拷贝,故删除该赋值函数 thread& operator=(const thread& other)=delete // 右值的other能赋值,会发生资源所有权的转移 thread& operator=(const thread&& other) noexcept /* 阻塞主线程,并等待子线程执行完毕后回收它的资源,然后子线程与主线程汇合一起执行其他程序 */ join() /* 主线程不用等待子线程结束;一旦detach后,该子线程会被c++运行时库接管,运行结束后,由运行时库负责清理该线程相关的资源 */ detach(): /* 判断子线程的分离状态并返回布尔类型,即是否可以成功使用join()、detach()(true则是可以使用) */ joinable(): /* c++11中,命名空间std::this_thread的全局函数 */ this_thread::get_id() // 得到线程的id this_thread::sleep_for() // 使线程休眠一段时间 // 线程休眠1秒 Sleep(1000); this_thread::sleep_for(chrono::seconds(1)); this_thread::sleep_until() // 让线程休眠到某个时间点,可实现线程定时任务 this_thread::yield() // 让线程主动让出自己已抢到的CPU时间片 /* thread类的其他成员函数 */ swap(std::thread& other) // 交换两个线程对象 static unsigned hardware_concurrency() noexcept // 返回硬件线程上下文的数量 -
其他创建线程的方法:
用类:类中必须要重载()运算符,将该类对象变成可调用对象,才能用来初始化线程对象。其中涉及到的过程:有参构造 --> 拷贝构造函数 --> 析构函数,最后对有参构造的类对象进行析构。
用lambda表达式,完成创建。
auto mylambdathread = []() { cout << "子线程开始执行" << endl; // ..... cout << "子线程执行结束" << endl; };
创建线程的要点:
给子线程入口函数传递参数时,要用值传递(不能用引用或者指针):
-
简单的类型参数要用,值传递,不要用引用。
-
如果传递类对象,则要避免隐式类型转换(即创建子线程时,就生成临时对象并拷贝给入口函数)且该入口函数的形参中类对象要用常量引用。
// 该入口函数的形参中,类对象用常量引用 myPrint(const int i, const string &mystring) {...} // 创建子线程时,就生成临时对象并拷贝给入口函数 thread mythreadObj(myPrint, i, string(mychar));- 整个过程发生在主线程中;
- 会调用该类的(有参)构造函数和拷贝构造函数,和一个析构函数(析构的是(有参)构造函数);
- 临时对象构造时机的捕获:通过
std::this_thread:;get_id()得到,给子线程入口函数传递类对象时,直接进行类型转换,这会将产生的临时对象会拷贝给入口函数(整个过程都发生在主线程中)。
只使用.join(),就不会存在局部变量失效,导致线程对内存的非法引用的问题。
传递类对象、智能指针、类成员函数指针作为线程参数:
-
传递类对象时,如果希望在子线程中修改该类对象的成员,则要用
std::ref()函数引用类对象的地址且不会发生拷贝动作。 -
智能指针unique_ptr作为线程参数:
unique_ptr<int> i_uptr(new int(100)); thread mythreadObj(myPrint, std::move(i_uptr)); -
类成员函数指针:
thread mythreadObj(&A::func, a, 10); thread mythreadObj(&A::func, &a, 10); // &a == std::ref(a);
创建和等待多个线程:
将多个线程对象放入thread数组:
// 用thread数组创建多个线程
thread mythreadObj[10];
for (int i = 0; i < sizeof(mythreadObj) / sizeof(mythreadObj[0]); i++)
{
mythreadObj[i] = thread(myPrint1, i);
}
for (int i = 0; i < sizeof(mythreadObj) / sizeof(mythreadObj[0]); i++)
{
mythreadObj[i].join();
}
将多个线程对象放入容器:
// 用vector容器创建多个线程
vector<thread> threadVctor;
// 创建10个线程,线程入口函数统一使用myPrint()
for (int i = 0; i < 10; i++)
{
threadVctor.push_back(thread(myPrint1, i)); // 创建thread对象,并发生了拷贝到了容器中
}
for (vector<thread>::iterator iter = threadVctor.begin(); iter != threadVctor.end(); iter++)
{
(*iter).join(); // 等价于iter->join();
}
互斥锁:
c++11-14-17_内存管理(RAII)_多线程:详细分析“c++多线程从原理到线程池实现”。
多个线程的数据共享:
数据共享问题分析:
- 1)只读的数据:是安全稳定的,不需要特殊的处理;
- 2)有读有写:读的时候不能写,写的时候不能读;否则会发生混乱而报错;
解决的方法:引入互斥量mutex,
- 写的时候锁住不让它读;读的时候锁住不让它写;确保同一时间只能有一个线程操作该共享资源;
- 某个线程把共享数据锁住、操作数据、解锁;其他操作共享数据的线程必须等待解锁,然后才能锁定、操作数据、解锁;
c++11中提供四种互斥锁:
mutex互斥锁:
含有的成员函数:.lock()、.unlock()、.join()、.joinable()、.detach()。
timed_mutex带超时机制的互斥锁:
含有的成员函数:.try_lock_for(时间长度)、.try_lock_until(时间点)。
recursive_mutex递归互斥锁:
允许同一个线程多次获得互斥锁,可以解决同一线程多次加锁造成的死锁问题。
recursive_timed_mutex带超时机制的递归互斥锁
互斥量mutex:
互斥量可以理解为一把锁:
-
lock的代码段越少,执行的速度越快,整个程序的运行效率越高。
lock的力度,需要掌控。力度越大,执行效率越低;力度越小,共享数据的能保护力度越低。
-
线程持有锁的时间越长,程序运行效率越低。
mutex类:
.lock() // 加锁
/*
互斥锁有锁定、未锁定两种状态:
1)未锁定状态下,调用lock()的线程会得到互斥锁的所有权,并将其上锁;
2)锁定状态下,调用lock()的线程会“阻塞等待”,直到互斥锁变成未锁定的状态;
多个线程尝试用lock()成员函数进行加锁,且只有一个线程能加锁成功;没锁成功,则子线程会卡在这并不断尝试去锁这把锁头。
*/
.unlock() // 解锁:只有持有锁的线程才能解锁
/* std::mutex::lock()、std::mutex::unlock(),必须成对使用 */
.try_lock() // 尝试加锁
/*
1)如果互斥锁是为未加锁的状态,则加锁成功,函数返回true
2)如果互斥锁是锁定的状态,则加锁失败,函数立即返回false且“线程不会阻塞”
*/
C++中的死锁:
产生的条件:至少要有两把锁头,也就是两个互斥量才能产生。
死锁的现象:当两个线程(都对两把锁进行锁和解锁的操作,锁的顺序相反)分别锁住了两个锁头,就会各自去寻找另一个锁头,从而产生了死锁。
本质原因:两个线程上锁的顺序不同。
死锁的解决方案:
-
保证两个互斥量在两个线程中的,锁的顺序相同。
-
std::lock()函数模板:
// 作用:一次能够锁住两个或者两个以上的互斥量。 // 不存在多个线程中,锁的顺序问题导致死锁的问题。 // 写法一: std::lock(m_mutex1, m_mutex2); m_mutex1.unlock(); m_mutex2.unlock(); // 写法二: std::lock(m_mutex1, m_mutex2); std::lock_guard<std::mutex> lguard1(m_mutex1, std::adopt_lock); std::lock_guard<std::mutex> lguard2(m_mutex2, std::adopt_lock); // 参数std::adopt_lock是结构体对象,起标记作用:作用就是表示该互斥量已经被lock(),不需要lock_guard再进行锁的操作,只需进行解锁 std::lock():
1)如果有一个互斥量没锁住,它就会在那里等,等待所有互斥量都被锁住之后,才能往下走。
2)要么两个互斥量都锁住了,要么都没锁住;如果只有一个锁住了,另一个没锁成功,则会解锁已经被锁住的锁。
-
建议一个线程中不要对两个互斥量同时上锁,最好一个一个锁;工作中,使用
lock_guard足够了。
unique_lock和lock_guard都是管理锁的辅助类:
为防止mutex加锁后忘记unlock(),引出std::lock_guard()类模板:
std::mutex m_mutex;
std::lock_guard<std::mutex> lockguard(m_mutex);
lock_guard()采用了RAII的思想:
- 在其构造函数中,执行
std::mutex::lock() - 在其析构函数中,执行
std::mutex::unlock()
缺点:lock_guard的解锁控制不灵活,但可以通过对lock_guard施加作用域来控制lock、unlock的生命周期。
std::lock_guard<std::mutex> lguard(m_mutex, std::adopt_lock);
// std::adopt_lock是结构体对象,起标记作用:表示该互斥量已经被lock(),不需要lock_guard再进行锁的操作,只需进行解锁
类模板unique_lock取代lock_guard:
unique_lock和lock_guard的异同点:
- 区别:unique_lock占用的内存更多,效率低,但更加灵活。
- 相同点:都是
RAII风格,在构造函数中加锁,在析构函数中解锁。
unique_lock 的第二个参数:
/* 1)std::adopt_lock是结构体对象,起标记作用:表示该互斥量已经被lock(),不需要unique_guard再进行锁的操作,只需进行解锁。*/
/* 2)std::try_to_lock(使用前不能锁):会尝试用mutex的lock()去锁定这个mutex;但如果没有锁成功,则会立即返回,并不会阻塞在那里。*/
std::unique_lock<std::mutex> lck(mtx, std::try_to_lock);
// 判断互斥量是否拿到了锁
bool succ = lck.owns_lock();
/* 3)std::defer_lock:初始化未加锁的互斥量;但需要自己解锁。*/
unique_lock<std::mutex> lck(mtx, std::defer_lock);
// 需要自己加锁;
for (int i = 0; i < n; i++)
{
lck.lock();
//操作共享数据
//........
lck.unlock();
//操作非共享数据
//........
lck.lock();
//操作共享数据
//........
}
unique_lock的成员函数:
lock() // 加锁
unlock() // 解锁
try_lock() // 尝试加锁,拿到锁返回true,否则返回false且不会发生阻塞
// release():
/* 返回它所管理的mutex对象的指针(原始的mutex指针),并释放所有权(即unique_lock和mutex不再有关系了)*/
unique_lock<std::mutex> lck(mtx);
mutex* pt_rel = lck.release();
// mtx所有权转让给pt_rel,因此需要pt_rel自己解锁
//pt_rel->lock(); // Error:接收lck.release()无需再次上锁,即已上锁
// .............操作共享数据
pt_rel->unlock();
unique_lock所有权的转移:
-
通过std::move()进行所有权转移;
std::unique_lock<std::mutex> lck(mtx); std::unique_lock<std::mutex> lck_move(std::move(lck)); // std::move()移动构造函数使用,转移所有权 -
通过函数返回局部的unique_lock对象(该局部对象,会生成临时对象并调用unique_lock的移动构造函数);
std::mutex mtx; unique_lock<mutex> umtx_lockfunc() { unique_lock<mutex> temp_mtxLock(mtx); // temp_mtxLock拥有mtx的所有权,可将该互斥量mtx的所有权转移给其他的unique_lock对象(但不能复制) return temp_mtxLock; } // 通过函数umtx_lockfunc(),返回局部的unique_lock对象,生成了临时对象和调用了移动构造函数,从而将所有权转移给lock_move std::unique_lock<std::mutex> lck_move = umtx_lockfunc(); // .......操作共享数据 lck_move.unlock();
线程的移动和交换
单例设计模式共享数据的问题:
单类模式:确保多线程同时尝试创建一个的单类的实例时,只有一个能创建成功。提供一个访问它的全局访问点,该实例被所有程序模块共享。
懒汉模式:
单例实例在第一次被使用时才进行初始化,称为“延迟初始化”。
-
C++11前,多线程环境下local static对象的初始化并不是线程安全的。具体表现就是:
1)如果一个线程正在执行local static对象的初始化语句但还没有完成初始化;
2)此时若其它线程也执行到该语句,那么这个线程会认为自己是第一次执行该语句并进入该local static对象的构造函数中,这会造成这个local static对象的重复构造,进而产生内存泄露问题。
c++11引入std::call_once()的函数模板:保证函数只被调用一次;具备有互斥的能力,且效率高占用的互斥资源少。
#include#include - C++11规定,在一个线程开始local static对象的初始化后到完成初始化前,其他线程执行到这个local static对象的初始化语句就会等待。
/* C++11线程安全 */
class Singleton
{
private:
static Singleton* instance;
private:
Singleton() {};
~Singleton() {};
Singleton(const Singleton&) = delete;
Singleton& operator=(const Singleton&) = delete;
public:
static Singleton* getInstance()
{
if(instance == nullptr)
{
instance = new Singleton();
}
return instance;
}
};
// init static member
Singleton* Singleton::instance = nullptr;
“饿汉模式”线程安全:
#include 条件变量:std::condition_variable、wait()、notify_one():
条件变量是一种线程同步机制:
- 当条件不满足时,相关线程被一直阻塞,直到某种条件出现,这些线程才会被唤醒
- 举例:在两个线程中,一个线程向另一个线程发送消息,从而激活另一个线程。
常使用条件变量的场景:生产-消费者模型(高速缓存队列):
为保护共享资源,“条件变量”需与“互斥锁”结合使用。。
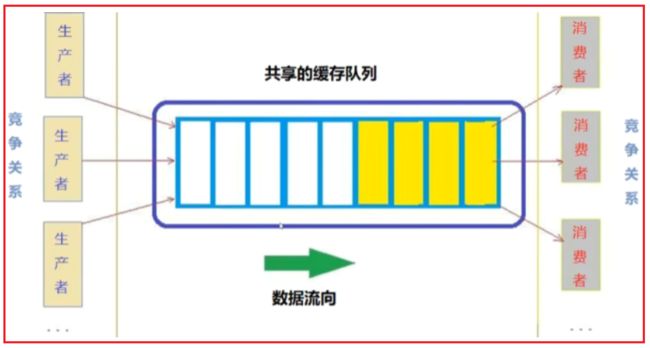
注:生产者可以是单/多线程,而消费者一般都是多线程,俗称线程池。生产者产生的数据放入缓存队列,需要条件变量来通知消费者。
class A2
{
public:
A2() { cout << "默认构造函数" << endl; }
virtual ~A2() { cout << "虚析构函数" << endl; }
// 将收集到的数据放入队列
void InsertMessageQueue(int val)
{
for (int i = 0; i < 100000; i++)
{
std::unique_lock<std::mutex> umtx_lock (m_mutex);
MessageQueue.push_back(val);
m_conditionVar.notify_one(); // 尝试将另一个线程中的wait()唤醒
}
}
void OutMessageQueue()
{
while (true) // 死循环
{
std::unique_lock<std::mutex> umtx_lock(m_mutex);
/* 循环阻塞当前线程,直到通知到达且谓词满足 */
m_conditionVar.wait(umtx_lock, [this]() {
if (!this->MessageQueue.empty())
{
return true;
}
return false;
});
// 流程能执行到这里,表明互斥量一直是锁着的状态;MessageQueue中至少有一条命令command
int retVal = MessageQueue.pop_back();
return retVal;
}
}
public:
list<int> MessageQueue;
std::condition_variable m_conditionVar;
std::mutex m_mutex;
};
c++11的#include条件变量提供了两个类:
condition_variable:
成员函数:
只支持与普通mutex搭配,效率更高。
condition_variable() // 默认构造函数
notify_one() // 通知一个线程的wait函数
notify_all() // 同时通知多个线程的wait函数
/*
1)会把互斥锁解开;
2)阻塞,并等待“被唤醒”且“满足谓词”;
3)给互斥锁加锁;
总结:wait导致当前线程阻塞直至“被条件变量通知”或“虚假唤醒发生”,可选地循环直至“满足某谓词”。
*/
wait(unique_lock<mutex> lock) // 阻塞当前线程,直到通知到达
wait(unique_lock<mutex> lock, Pred pred) // 循环阻塞当前线程,直到通知到达且谓词满足

当另一个线程的notify_one()函数将本线程中wait()函数激活后,
① wait()会尝试不断重新获取互斥量的锁,获取不到会卡在这里;获取到了(等于给互斥量加锁)则会继续执行 ②;
② 如果wait()函数有第二个参数,会判断lambda表达式,为false则解锁互斥量并阻塞在本行;为true则wait()返回,并继续向下执行流程(此时互斥量一直是被锁的状态);如果wait()函数没有第二个参数,则wait()返回并继续向下执行流程;
condition_variable_any:
一种通用的条件变量,可以与任意的mutex搭配使用,包括自定义的锁类型。
std::async、std::future:创建后台任务并返回值:
std::async函数模板:用来启动一个异步任务,并返回std::future对象(类模板对象)。
std::future对象中含有线程入口函数所返回的结果,能通过其成员函数get()来获取结果。
// 自动创建一个“异步线程”(执行“异步任务”)并开始执行对应的线程入口函数,最终返回一个std::future对象
std::future<int> result = std::async(mythread);
cout << result.get() << endl;
get()函数,一直在等待,除非拿到结果(且只能调用一次)。
std::native_handle()函数:
对操作系统的线程库进行封装,都会损失一部分功能,为了弥补c++11线程库的不足,thread类提供了native_handle()成员函数:用于获得与操作系统相关的原生线程句柄。
注:操作系统的原生线程库,就可以用原生线程句柄操作线程。
原子类型#include:
c++11提供的模板类atomic,其模板参数可以是bool、int、long、long long、指针类型(不支持浮点数和自定义类型)。
原子操作介绍:
由CPU指令提供支持,性能比锁和消息传递效率更高,且支持修改、读取、交换、比较并交换等操作。
成员函数:
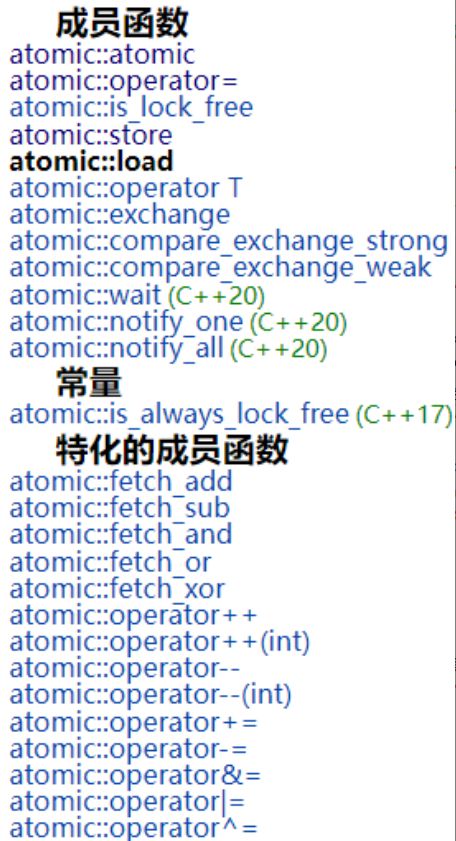
/* 构造函数:*/
atomic() noexcept = default; // 默认构造函数
constexpr atomic(T desired) noexcept; // 转换函数
atomic(const atomic&) = delete; // 拷贝构造函数
/* 赋值函数(禁用):*/
atomic& operator=(const atomic&) = delete;
/* 常用的函数:*/
void store(T desired, std::memory order order = std::memory order seq cst) noexcept;
// desired:存储到原子变量中的值、order:强制的内存顺序
/* 将desired值存入原子变量中:*/
T load(std::memory order order = std::memory order seq cst) const noexcept;
// 原子地加载并返回原子变量的当前值。按照order的值影响内存。
使用细节:
atomic模板类的模板参数是指针,表示该指针是原子类型,但不表示它所指向的对象是原子类型。atomic模板类重载了整数操作的各种运算符。- 原子整型可用作“计数器”,布尔型可用作开关。
CAS指令,是实现“无锁队列”的基础。