STM32F4XX之串口
一、标准串口(UART)介绍
1、通信协议相关概念
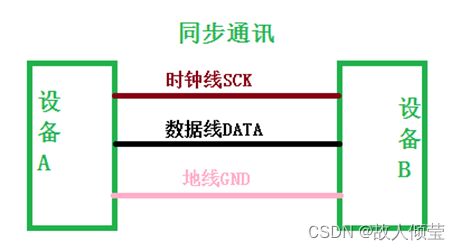
1.1同步通信和异步通信
(1)同步通信:两个器件之间共用一个时钟线,要发送的数据在时钟的作用下一位一位发送出去。
(2)异步通信:指两个器件之间没有时钟线连接,器件接受/发送数据时使用各自的时钟,以不同的时钟频率进行通信。

1.2串行与并行通信
(1)串行通信:只有一根数据线,各个数据位通过数据线按照顺序一位一位的传输。
优点:稳定性高、简单、成本低
缺点:速度慢
(2)并行通信:有多根数据线,各个数据位同时传输。
优点:速度快。
缺点:稳定性不高、设计复杂、成本高。(占用引脚资源多)
1.3单工、半双工、全双工通信
(1)单工:数据只能由设备A到设备B,不能从设备B到设备A,(任何时候只能是一个方向,如遥控器)。

(2)半双工:设备A发送数据给设备B或者设备B发送数据给设备A。(数据可以在两个方向上传输。同一时刻,数据只能在一个方向传输,传输方向可切换的单工通信;接收端和发送端,可以使用一个端口(扩展)。如对讲机)。

(3)全双工:设备A发送数据给设备B的同时,设备B也可以发送数据给设备A。(允许数据同时在两个方向上传输,发送接收互补影响,所以需要独立的接收端和发送端)。

2、标准串口(UART)概念及其作用
2.1概念:串口也称串行通信接口,是一种MCU与其他器件通信的通信协议。
2.2作用:主要用于芯片与芯片之间、模块与芯片之间、模块与模块之间按照这种通信协议进行数据交换。如:STM32F4XX 和 GSM ,WIFE.北斗.语音,5G模块等。
2.2.1标准UART的协议类型及拓扑接口(接口标准)
底层:接口规范
标准UART的协议类型:异步串行全双工。(没有时钟线,一条发送数据线,一条接收数据线)
RXD:数据接收管脚;R = receive接受
TXD:数据发送管脚;T = transmit发送
注意:地线在硬件上一定要接,否则数据不正常。
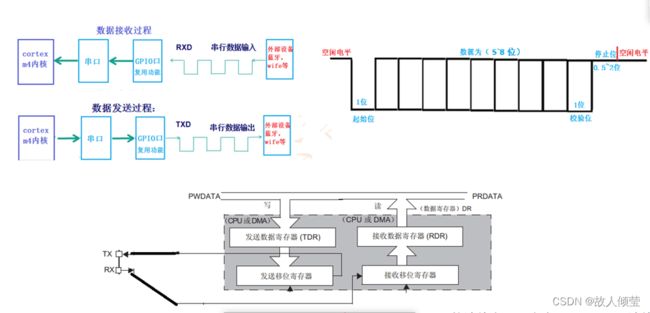
2.2.2标准UART的数据帧格式
数据帧格式:将要发送的真正的信息和其它通信必须的信号封装成一包数据,这一包数据包含以下几个内容。

标准UART中一帧数据:1位起始位+(5~8)数据位+1位校验位+(0.5~2)位停止位。
空闲电平:数据线不传输数据时的状态,该状态为高电平。
起始位:该状态为低电平,占用一个bit,代表通信开始。
数据位:真正传输的数据,占用5~8bit。
校验位:为了检测数据传输的正确与否。占用1bit。
(一般不用)奇偶校验位:奇校验:1000 1100 0
偶校验:1110 0000 1
停止位:该状态为高电平,占用0.5~2bit,代表通信结束。
2.2.3标准串口速率控制
什么是波特率?波特率的作用是什么?
(1)波特率的作用和概念: 当接收和发送器件的时钟频率不一致时,为了让数据可以正确的收发,所以双方要规定好一个合适的频率进行通信,规定的这个频率称之为波特率,波特率又叫比特率。
(2)波特率:单位时间内传输的二进制代码的有效位数,其常用单位为每秒比特数bit/s(bps== bit per second)。
(3)常用的波特率:115200、38400、9600,每秒能传输多少位数据。
总结:标准UART的四要素:波特率(通讯速率),数据位长度,校验位,停止位长度。
二、串口的概述
串口是模块是芯片内部的一个片内外设。

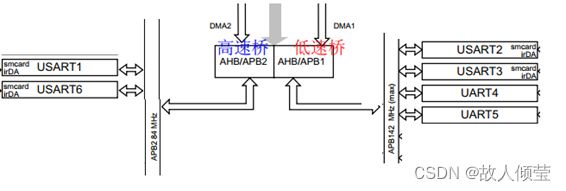
STM32F407单片机内部共有6个串口
1.USART介绍
名词解析:USART :Universal Synchronous/Asynchronous ReceiverTransmitters
U:通用的 S:同步 A:异步 R:接受 T:发送
通用同步异步收发器 (USART) 能够灵活地与外部设备进行全双工数据交换,满足外部设备对工业标准 NRZ 异步串行数据格式的要求。

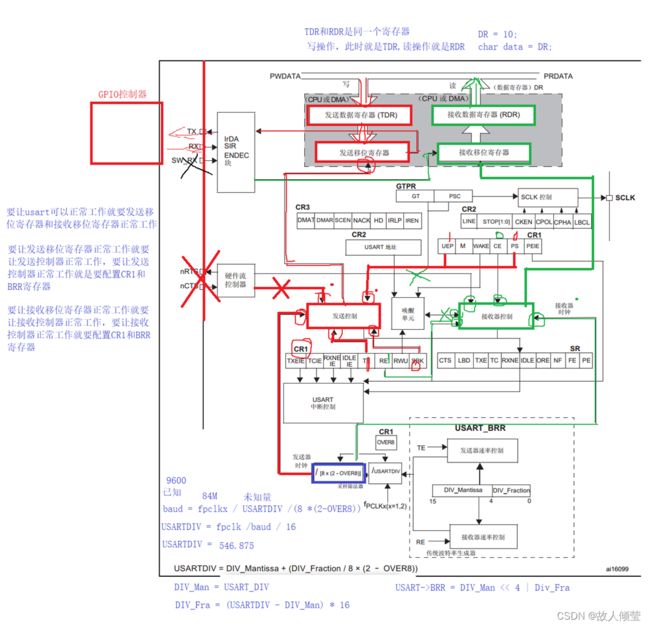
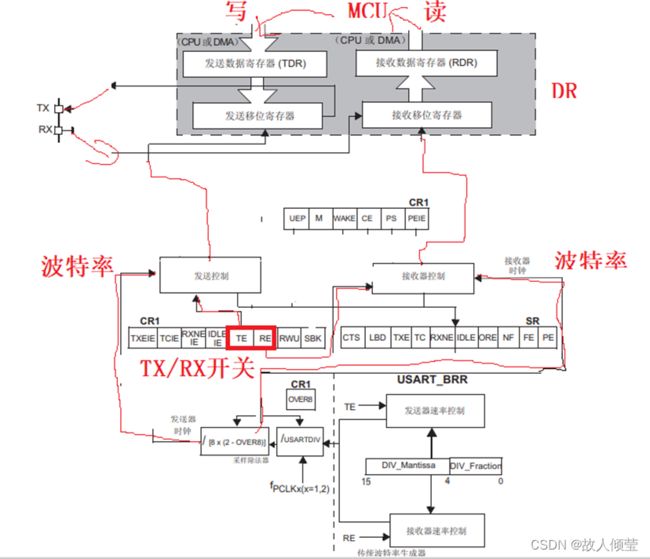
2.UART框图分析
2.1管脚部分
TX:发送数据管脚
RX:接收数据管脚
2.2数据发送/接收部分


CPU定义一个8位或者9位的数据并写入到数据寄存器(DR)
1发送数据’A’: USART->DR= ’A’;
(cpu)读取接收数据寄存器(DR)里的值。(人为)
2接受数据:int a= USART->DR;
串口通讯流程
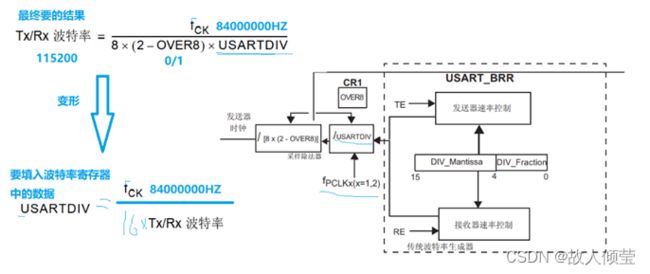
2.3波特率设置
USART 通过小数波特率发生器提供了多种波特率。
2.4控制部分及寄存器分析
三、UART相关寄存器介绍
状态寄存器 (USART_SR)

位 7 TXE:发送数据寄存器为空 (Transmit data register empty)
当 TDR 寄存器的内容已传输到移位寄存器时,该位由硬件置 1。
如果 USART_CR1 寄存器 中 TXEIE 位 = 1,则会生成中断。通过对 USART_DR 寄存器执行写入操作将该位清零。
0:数据未传输到移位寄存器
1:数据传输到移位寄存器
位 6 TC:发送完成 (Transmission complete)
如果已完成对包含数据的帧的发送并且 TXE 置 1,则该位由硬件置 1。如果 USART_CR1 寄存器中 TCIE = 1,则会生成中断。该位由软件序列清零(读取 USART_SR 寄存器,然后写入 USART_DR 寄存器)。TC 位也可以通过向该位写入‘0’来清零。建议仅在多缓冲区通信时使用此清零序列。
0:传送未完成
1:传送已完成
位 5 RXNE:读取数据寄存器不为空 (Read data register not empty)
当 RDR 移位寄存器的内容已传输到 USART_DR 寄存器时,该位由硬件置 1。如果 USART_CR1 寄存器中 RXNEIE = 1,则会生成中断。通过对 USART_DR 寄存器执行读入操作将该位清零。RXNE 标志也可以通过向该位写入零来清零。建议仅在多缓冲区通信时使用此清零序列。
0:未接收到数据
1:已准备好读取接收到的数据
位 4 IDLE:检测到空闲线路 (IDLE line detected)
检测到空闲线路时,该位由硬件置 1。如果 USART_CR1 寄存器中 IDLEIE = 1,则会生成中 断。该位由软件序列清零(读入 USART_SR 寄存器,然后读入 USART_DR 寄存器)。
0:未检测到空闲线路
1:检测到空闲线路
注意:直到 RXNE 位本身已置 1 时(即,当出现新的空闲线路时)IDLE 位才会被再次置 1。
2.数据寄存器 (USART_DR)
位 8:0 DR[8:0]:数据值
包含接收到数据字符或已发送的数据字符,具体取决于所执行的操作是“读取”操作还是“写入”操作。
因为数据寄存器包含两个寄存器,一个用于发送 (TDR),一个用于接收 (RDR),因此它具有双重功能(读和写)。
3.波特率寄存器 (USART_BRR)
位 31:16 保留,必须保持复位值
位 15:4 DIV_Mantissa[11:0]:USARTDIV 的尾数
这 12 个位用于定义 USART 除数 (USARTDIV) 的尾数
位 3:0 DIV_Fraction[3:0]:USARTDIV 的小数
这 4 个位用于定义 USART 除数 (USARTDIV) 的小数。当 OVER8 = 1 时,不考虑 DIV_Fraction3
位,且必须将该位保持清零。
注意: 如果 TE 或 RE 位分别被禁止,则波特计数器会停止计数。
4.控制寄存器 1 (USART_CR1)
位 15 OVER8:过采样模式 (Oversampling mode)
0:16 倍过采样
1:8 倍过采样
//过采样就是为得到一个信号真实情况,需要用一个比这个信号频率高的采样信号去检测,也就是将串口接收的速度提高了,16倍就是采样速度提高16倍,即会采样更多 的点来确定数据的正确性但为了得到越高频率采样信号越也困难,运算和功耗等等也会增加,所以一般选择合适就好。
位 13 UE:USART 使能 (USART enable)
该位清零后,USART 预分频器和输出将停止,并会结束当前字节传输以降低功耗。此位由软件置 1 和清零。
0:禁止 USART 预分频器和输出
1:使能 USART
注意:串口全部配置好,最后打开此位
位 12 M:字长 (Word length)
该位决定了字长。该位由软件置 1 或清零。
0:1 起始位,8 数据位,n 停止位
1:1 起始位,9 数据位,n 停止位
位 3 TE:发送器使能 (Transmitter enable)
该位使能发送器。该位由软件置 1 和清零。
0:禁止发送器
1:使能发送器
位 2 RE:接收器使能 (Receiver enable)
该位使能接收器。该位由软件置 1 和清零。
0:禁止接收器
1:使能接收器并开始搜索起始位
5.控制寄存器 2 (USART_CR2)
位 13:12 STOP:停止位 (STOP bit)
这些位用于编程停止位。
00:1 个停止位
01:0.5 个停止位
10:2 个停止位
11:1.5 个停止位
6.外设时钟使能寄存器
USART是学习STM32F407ZGT6的第一个外设,这个外设如果要正常工作需要开启相应的时钟(打开开关)。USART外设接在哪条总线上。《STM32F407ZGT6数据手册》第二章节芯片框架中有。开启RCC相关寄存器配置。
(1).RCC APB1 外设时钟使能寄存器 (RCC_APB1ENR)
 位 20 UART5EN:UART5 时钟使能 (UART5 clock enable)
位 20 UART5EN:UART5 时钟使能 (UART5 clock enable)
由软件置 1 和清零。
0:禁止 UART5 时钟
1:使能 UART5 时钟
位 19 UART4EN:UART4 时钟使能 (UART4 clock enable)
由软件置 1 和清零。
0:禁止 UART4 时钟
1:使能 UART4 时钟
位 18 USART3EN:USART3 时钟使能 (USART3 clock enable)
由软件置 1 和清零。
0:禁止 USART3 时钟
1:使能 USART3 时钟
位 17 USART2EN:USART2 时钟使能 (USART2 clock enable)
由软件置 1 和清零。
0:禁止 USART2 时钟
1:使能 USART2 时钟
(2)RCC APB2 外设时钟使能寄存器 (RCC_APB2ENR)
位 5 USART6EN:USART6 时钟使能 (USART6 clock enable)
由软件置 1 和清零。
0:禁止 USART6 时钟
1:使能 USART6 时钟位
4 USART1EN:USART1 时钟使能 (USART1 clock enable)
由软件置 1 和清零。
0:禁止 USART1 时钟
1:使能 USART1 时钟
四、硬件分析

五、软件分析
配置GPIO口
1. 打开GPIOA的时钟
2. 配置PA9和PA10为复用模式
3. 推挽类型
4. 不需要上下拉
5. 速度2M
6. 复用到哪里?
配置USART
1. 打开USART1外设时钟
2. 配置CR1寄存器(16倍过采样,8位字长,接收器和发送器使能,无奇偶校验)
3. 配置停止位(CR2)
4. 配置波特率(BRR)
5. 使能USART1
6. 发送数据出去(DR)
#include "usart1.h"
/************************************
函数功能:USART1初始化
函数形参:u32 baud -- 波特率
函数返回值:void
函数说明:
PA9 -- 复用到USART1_TX
PA10 -- 复用到USART1_RX
作者:
日期:
************************************/
void Usart1_Init(u32 baud)
{
float USARTDIV = 0;
u16 DIV_Man = 0;
u16 DIV_Fra = 0;
// 一.配置GPIO口
//1.打开GPIOA的时钟
RCC->AHB1ENR |= 0X1 << 0;
//2.配置PA9和PA10为复用模式
GPIOA->MODER &= ~(0XF << 9 *2);
GPIOA->MODER |= 0XA << 9*2;
//3.复用到哪里?往复用高位寄存器的9号和10号管脚写7
GPIOA->AFR[1] &= ~(0XFF << 4);
GPIOA->AFR[1] |= (0X77 << 4);
// 二.配置USART
//1.打开USART1外设时钟
RCC->APB2ENR |= 0X1 << 4;
//2.配置CR1寄存器
USART1->CR1 = 0;
/*
16倍过采样
1 起始位, 8 数据位, n 停止位
无奇偶校验
*/
USART1->CR1 |= 0X3 << 2;//接收器和发送器都使能了
//3.配置1个停止位(CR2)
USART1->CR2 &= ~(0X3 << 12);
//4.配置波特率(BRR)
USARTDIV = FPCLK / baud / 16;
DIV_Man = USARTDIV;
DIV_Fra = (USARTDIV - DIV_Man) *16;
USART1->BRR = DIV_Man << 4 | DIV_Fra;
//5.使能USART1
USART1->CR1 |= 0X1 << 13;
}
/************************************
函数功能:使用USART发送字符串
函数形参:u8 *str
函数返回值:void
函数说明:
可以通过USART1的DR寄存器发送数据到电脑上
作者:
日期:
************************************/
void Send_String(u8 *str)
{
while(*str != 0)
{
if(USART1->SR & (0X1 << 7))
{
USART1->DR = *str;
str++;//只有成功发出去才进行偏移
}
}
}
RECEVICE rec_str = {0};
/************************************
函数功能:接受一个字符串
函数形参:void
函数返回值:void
函数说明:
要有一个接收电脑传过来数据的数组
当前数组的长度
有一个接收完成的标志位
利用一个特定的字符来判断什么时候接受完数据
作者:
日期:
************************************/
void Receive_String(void)
{
if(USART1->SR & (0X1 << 5))//判断什么时候接受到数据
{
if(USART1->DR != '\n')
{
rec_str.rec_buff[rec_str.len++] = USART1->DR;
}
else
{
rec_str.rec_buff[rec_str.len++] = USART1->DR;
rec_str.rec_buff[rec_str.len] = '\0';
rec_str.len = 0;//让下一次存储的字符串又从0号元素下标开始
rec_str.flag = 1;//接收完成标志位可以让别人知道接收完整个字符串
}
}
}
//printf支持
#pragma import(__use_no_semihosting_swi) //取消半主机状态
struct __FILE { int handle; /* Add whatever you need here */ };
FILE __stdout;
int fputc(int ch, FILE *f) {
while((USART1->SR &(0X01<<7))==0);
USART1->DR=ch;
return (ch);
}
int ferror(FILE *f) {
/* Your implementation of ferror */
return EOF;
}
void _ttywrch(int ch) {
while((USART1->SR &(0X01<<7))==0);
USART1->DR=ch;
}
void _sys_exit(int return_code) {
label: goto label; /* endless loop */
}
#ifndef __USART_H_
#define __USART_H_
#include "stm32f4xx.h"
#include "io_bit.h"
#include "stdio.h"
#define FPCLK 84000000
#define BUFFSIZE 256
typedef struct{
u8 rec_buff[BUFFSIZE];//定义一个接收数据的数组
u8 len; //当前接收到的数据的长度
u8 flag;//表示当前接收到的数据已经是一个字符串的形式了
}RECEVICE;
extern RECEVICE rec_str;
void Usart1_Init(u32 baud);
void Send_String(u8 *str);
void Receive_String(void);
#endif
int main(void)
{
Usart1_Init(9600);
printf("111");
while(1)
{
Receive_String();//不断的接收数据
if(rec_str.flag == 1)
{
rec_str.flag = 0;//首先把标志位清零
printf("接收到的字符串:%s\r\n",rec_str.rec_buff);
memset(rec_str.rec_buff,0,sizeof(rec_str.rec_buff));
}
}
}