【路径规划】基于蜣螂优化算法的三维无人机航迹规划 无人机路径规划【Matlab代码#9】
文章目录
-
- 【可更换其他算法,`获取资源`请见文章第5节:资源获取】
- 1. 蜣螂优化算法DBO的数学模型介绍
- 2. 无人机航迹规划问题介绍
- 3. 部分代码展示
- 4. 结果图展示
- 5. 资源获取
【可更换其他算法,获取资源请见文章第5节:资源获取】
1. 蜣螂优化算法DBO的数学模型介绍
可参考DBO算法介绍
2. 无人机航迹规划问题介绍
无人机航迹规划是指在给定的环境中,通过算法或策略确定无人机的航行路径,以实现特定的任务目标。这个问题涉及到多个方面,包括路径规划、障碍物避免、最优化等。
下面是一些常见的无人机航迹规划问题和相关的方法:
- 最短路径规划:在给定起点和终点的情况下,确定无人机的最短路径以节省时间和能源。常用的算法包括Dijkstra算法、A*算法和快速随机树(Rapidly-exploring
Random Trees,RRT)等。 - 避障路径规划:考虑到环境中的障碍物,使无人机能够规避障碍物并找到可行路径。常用的算法包括启发式搜索算法(如A算法的变体)和采样优化算法(如RRT算法)。
- 多无人机协同规划:涉及到多个无人机的协同行动,以完成任务目标。这包括避免碰撞、分配任务、合作搜索等方面的问题。常用的方法包括多智能体路径规划、分布式协同算法等。
- 动态路径规划:考虑到动态环境中的障碍物和目标变化,使无人机能够实时调整路径以适应环境的变化。这可能需要使用传感器数据、实时地图更新和机器学习算法等。
- 最优路径规划:在给定的目标函数下,寻找最优的路径,如最小时间、最小能耗、最大安全性等。这需要建立合适的目标函数和约束条件,并应用优化算法(如遗传算法、粒子群优化等)来求解。
需要根据具体的应用场景和任务目标选择合适的方法和算法来解决无人机航迹规划问题。这通常涉及到环境建模、路径搜索和优化技术等多个领域的知识。
路径规划能力是无人机械完成各项规定任务的基本能力,而对于无人机而言,其三维航迹规划得合理与否,直接决定了无人机能否完成规定的任务,而航迹规划算法,又直接影响着航迹规划的质量。因此,进行无人机三维航迹规划算法的研究,对于提高无人机的任务完成率具有重要的意义。
近年来,针对无人机航迹规划问题的研究主要分为两类,一类是基于数学计算的航迹规划方法,另一类是基于智能仿生算法的航迹规划方法。其中,智能仿生算法在求解复杂、多约束条件下的无人机航迹规划问题时,具有较快的运算速度和较强的适用性,故受到了很对学者的青睐。
3. 部分代码展示
%% 威胁区域绘制
%威胁区域中心坐标
ThreatAreaPostion = [50,140];
%威胁区域半径
ThreatAreaRadius = 30;
%将威胁区域叠加到图上
figure
mesh(Map);
hold on;
for i= 1:size(ThreatAreaRadius)
[X,Y,Z] = cylinder(ThreatAreaRadius(i),50);
X = X + ThreatAreaPostion(i,1);
Y = Y + ThreatAreaPostion(i,2);
Z(2,:) = Z(2,:) + 50;%威胁区域高度
mesh(X,Y,Z)
end
%% 设置起始点
startPoint = [0,0,20];
endPoint = [200,200,20];
plot3(startPoint(1),startPoint(2),startPoint(3),'ro');
text(startPoint(1),startPoint(2),startPoint(3),'起点','Color','k','FontSize',15)
plot3(endPoint(1),endPoint(2),endPoint(3),'r*');
text(endPoint(1),endPoint(2),endPoint(3),'终点','Color','k','FontSize',15)
title('地图信息')
%% 蜣螂优化参数设置
NodesNumber = 2;%起点与终点之间节点的个数
dim = 2*NodesNumber; %维度,一组坐标点为[x,y,z]3个值,,其中X等间隔分布,所以总的数据个数为2*NodesNumber
lb = [20.*ones(1,NodesNumber),0.*ones(1,NodesNumber)];%x,y,z的下限[20,20,0]
ub = [180.*ones(1,NodesNumber),50.*ones(1,NodesNumber)];%x,y,z的上限[200,200,50]
fobj = @(x)fun(x,NodesNumber,startPoint,endPoint,ThreatAreaPostion,ThreatAreaRadius);%适应度函数
SearchAgents_no=70; % 种群数量
Max_iteration=50; % 设定最大迭代次数
%DBO寻优
[Best_pos_DBO,Best_score_DBO,DBO_curve]=DBO(SearchAgents_no,Max_iteration,lb,ub,dim,fobj);
%根据寻优获得的节点,获取插值后的路径
[X_seq_DBO,Y_seq_DBO,Z_seq_DBO,x_seq_DBO,y_seq_DBO,z_seq_DBO] = GetThePathLine(Best_pos_DBO,NodesNumber,startPoint,endPoint);
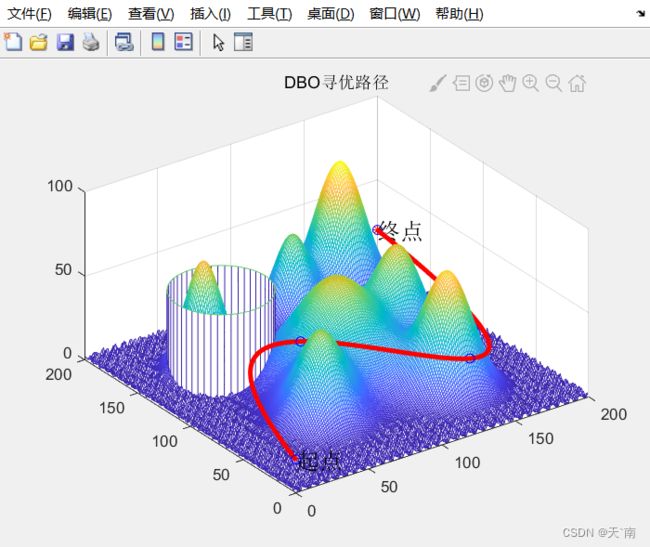
4. 结果图展示

5. 资源获取
可以获取完整代码资源。