Prewitt算子边缘检测原理及实现
写在前面
Prewitt算子同样也是一种一阶微分算子,利用像素点上下左右邻点灰度差,在边缘处达到极值检测边缘,对噪声具有平滑的作用。
原理
其原理是在图像空间利用两个方向模板与图像进行邻域卷积来完成的,这两个方向模板一个检测水平边缘,一个检测垂直边缘。
相比Roberts算子,Prewitt算子对噪声有抑制作用,抑制噪声的原理是通过像素平均,因此噪声较多的图像处理得比较好,但是像素平均相当于对图像的低通滤波,所以Prewitt算子对边缘的定位却不如Roberts算子。
那么为啥Prewitt算子对噪声有抑制作用呢?请看Prewitt算子的卷积核:
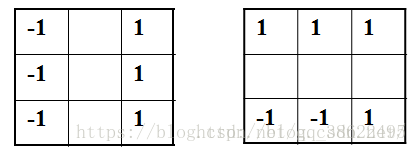
Prewitt_X Prewitt_Y
图像与Prewitt_X卷积后可以反映图像的垂直边缘,与Prewitt_Y卷积后可以反映图像的水平边缘。最重要的是,这两个卷积是可分离的:
 ,
, 
从分离的结果来看, Prewitt_X算子实际上是先对图像进行垂直方向的非归一化的均值平滑,然后进行水平方向的差分; 然而Prewitt_Y算子实际上是先对图像进行水平方向的非归一化的均值平滑,然后进行垂直方向的差分。这就是Prewitt算子能够抑制噪声的原因。
同理,我们也可以得到对角上的Prewitt算子算子,见代码即可。
代码实现
#include
#include
#include
#include
void getPrewitt_oper(cv::Mat& getPrewitt_horizontal, cv::Mat& getPrewitt_vertical, cv::Mat& getPrewitt_Diagonal1,cv::Mat& getPrewitt_Diagonal2){
//水平方向
getPrewitt_horizontal = (cv::Mat_(3, 3) << -1, -1, -1, 0, 0, 0, 1, 1, 1);
//垂直方向
getPrewitt_vertical = (cv::Mat_(3, 3) << -1, 0, 1, -1, 0, 1, -1, 0, 1);
//对角135°
getPrewitt_Diagonal1 = (cv::Mat_(3, 3) << 0, 1, 1, -1, 0, 1, -1, -1, 0);
//对角45°
getPrewitt_Diagonal2 = (cv::Mat_(3, 3) << -1, -1, 0, -1, 0, 1, 0, 1, 1);
//逆时针反转180°得到卷积核
cv::flip(getPrewitt_horizontal, getPrewitt_horizontal, -1);
cv::flip(getPrewitt_vertical, getPrewitt_vertical, -1);
cv::flip(getPrewitt_Diagonal1, getPrewitt_Diagonal1, -1);
cv::flip(getPrewitt_Diagonal2, getPrewitt_Diagonal2, -1);
}
void edge_Prewitt(cv::Mat& src, cv::Mat& dst1, cv::Mat& dst2, cv::Mat& dst3, cv::Mat& dst4, cv::Mat& dst, int ddepth, double delta = 0, int borderType = cv::BORDER_DEFAULT){
//获取Prewitt算子
cv::Mat getPrewitt_horizontal;
cv::Mat getPrewitt_vertical;
cv::Mat getPrewitt_Diagonal1;
cv::Mat getPrewitt_Diagonal2;
getPrewitt_oper(getPrewitt_horizontal, getPrewitt_vertical, getPrewitt_Diagonal1, getPrewitt_Diagonal2);
//卷积得到水平方向边缘
cv::filter2D(src, dst1, ddepth, getPrewitt_horizontal, cv::Point(-1, -1), delta, borderType);
//卷积得到4垂直方向边缘
cv::filter2D(src, dst2, ddepth, getPrewitt_vertical, cv::Point(-1, -1), delta, borderType);
//卷积得到45°方向边缘
cv::filter2D(src, dst3, ddepth, getPrewitt_Diagonal1, cv::Point(-1, -1), delta, borderType);
//卷积得到135°方向边缘
cv::filter2D(src, dst4, ddepth, getPrewitt_Diagonal2, cv::Point(-1, -1), delta, borderType);
//边缘强度(近似)
cv::convertScaleAbs(dst1, dst1); //求绝对值并转为无符号8位图
cv::convertScaleAbs(dst2, dst2);
cv::convertScaleAbs(dst3, dst3); //求绝对值并转为无符号8位图
cv::convertScaleAbs(dst4, dst4);
dst = dst1 + dst2 ;
}
int main(){
cv::Mat src = cv::imread("I:\\Learning-and-Practice\\2019Change\\Image process algorithm\\Img\\(embedded_square_noisy_512).tif");
if (src.empty()){
return -1;
}
if (src.channels() > 1) cv::cvtColor(src, src, CV_RGB2GRAY);
cv::Mat dst, dst1, dst2, dst3, dst4;
//注意:要采用CV_32F,因为有些地方卷积后为负数,若用8位无符号,则会导致这些地方为0
edge_Prewitt(src, dst1, dst2, dst3, dst4, dst, CV_32F);
cv::namedWindow("src", CV_WINDOW_NORMAL);
imshow("src", src);
cv::namedWindow("水平边缘", CV_WINDOW_NORMAL);
imshow("水平边缘", dst1);
cv::namedWindow("垂直边缘", CV_WINDOW_NORMAL);
imshow("垂直边缘", dst2);
cv::namedWindow("45°边缘", CV_WINDOW_NORMAL);
imshow("45°边缘", dst3);
cv::namedWindow("135°边缘", CV_WINDOW_NORMAL);
imshow("135°边缘", dst4);
cv::namedWindow("边缘强度", CV_WINDOW_NORMAL);
imshow("边缘强度", dst);
cv::waitKey(0);
return 0;
} 效果

