UE4获取空间坐标点对应颜色值
原理:
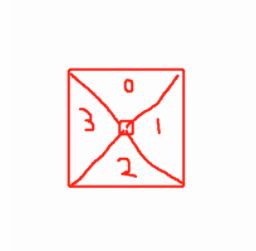
把360方向均分成4分,分别用四个90°的2DCapture渲染到renderTarget2D上,然后通过3D到2D renderTarget2D的映射关系,读取RenderTarget2D的颜色值
应用:点云数据,颜色采集
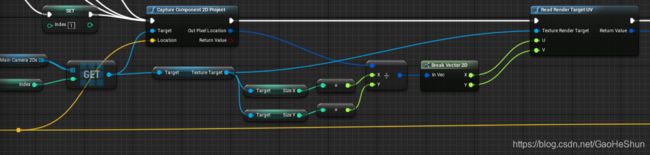
得到3D到2DRenderTarget2D的映射关系:
代码来源:github :
VictoryBPFunctionLibrary.h
https://github.com/UngureanuAdrian/RPGQuantumGate/blob/f1af44ab32cdbde8a90cf7bad170995693898be3/Plugins/VictoryPlugin25/Source/VictoryBPLibrary/Public/VictoryBPFunctionLibrary.h
// Fill out your copyright notice in the Description page of Project Settings.
#include "UtilLibrary.h"
#include "Engine/TextureRenderTarget2D.h"
#include "Engine/SceneCapture2D.h"
#include "Components/SceneCaptureComponent2D.h"
#include "Engine.h"
#include "Engine/World.h"
#include "Kismet/KismetSystemLibrary.h"
#include "MyProject.h"
#include "RHI.h"
bool UUtilLibrary::CaptureComponent2D_Project(class USceneCaptureComponent2D* Target, FVector Location, FVector2D& OutPixelLocation)
{
if ((Target == nullptr) || (Target->TextureTarget == nullptr))
{
return false;
}
const FTransform& Transform = Target->GetComponentToWorld();
FMatrix ViewMatrix = Transform.ToInverseMatrixWithScale();
FVector ViewLocation = Transform.GetTranslation();
// swap axis st. x=z,y=x,z=y (unreal coord space) so that z is up
ViewMatrix = ViewMatrix * FMatrix(
FPlane(0, 0, 1, 0),
FPlane(1, 0, 0, 0),
FPlane(0, 1, 0, 0),
FPlane(0, 0, 0, 1));
const float FOV = Target->FOVAngle * (float)PI / 360.0f;
FIntPoint CaptureSize(Target->TextureTarget->GetSurfaceWidth(), Target->TextureTarget->GetSurfaceHeight());
float XAxisMultiplier;
float YAxisMultiplier;
if (CaptureSize.X > CaptureSize.Y)
{
// if the viewport is wider than it is tall
XAxisMultiplier = 1.0f;
YAxisMultiplier = CaptureSize.X / (float)CaptureSize.Y;
}
else
{
// if the viewport is taller than it is wide
XAxisMultiplier = CaptureSize.Y / (float)CaptureSize.X;
YAxisMultiplier = 1.0f;
}
FMatrix ProjectionMatrix = FReversedZPerspectiveMatrix(
FOV,
FOV,
XAxisMultiplier,
YAxisMultiplier,
GNearClippingPlane,
GNearClippingPlane
);
FMatrix ViewProjectionMatrix = ViewMatrix * ProjectionMatrix;
FVector4 ScreenPoint = ViewProjectionMatrix.TransformFVector4(FVector4(Location, 1));
if (ScreenPoint.W > 0.0f)
{
float InvW = 1.0f / ScreenPoint.W;
float Y = (GProjectionSignY > 0.0f) ? ScreenPoint.Y : 1.0f - ScreenPoint.Y; //GProjectionSignY此变量需要引入RHI库
FIntRect ViewRect = FIntRect(0, 0, CaptureSize.X, CaptureSize.Y);
OutPixelLocation = FVector2D(
ViewRect.Min.X + (0.5f + ScreenPoint.X * 0.5f * InvW) * ViewRect.Width(),
ViewRect.Min.Y + (0.5f - Y * 0.5f * InvW) * ViewRect.Height()
);
return true;
}
return false;
}实现:
创建四个完全一致的RenderTarget2D

实例化四个2DCapture,并把四个renderterget2D传进去:
bool ULidarBase::InitLidarComponent_YH(int32 LidarLineNum, USceneComponent* Parent, TArray RenderTargets)
{
if (LidarLineNum<=0||Parent == nullptr|| RenderTargets.Num()<4)
{
return false;
}
USceneComponent* LidarRoot = NewObject(GetOwner());
LidarRoot->AttachToComponent(Parent, FAttachmentTransformRules::KeepRelativeTransform);
LidarRoot->RegisterComponent();
ThisLidarRoot = LidarRoot;
for (int32 j = 0; j < 4; j++)
{
USceneCaptureComponent2D* lidarCamera = NewObject(GetOwner());
lidarCamera->AttachToComponent(Parent, FAttachmentTransformRules::KeepRelativeTransform);
lidarCamera->RegisterComponent();
lidarCamera->TextureTarget = RenderTargets[j];
lidarCamera->CaptureSource = ESceneCaptureSource::SCS_FinalColorLDR;
lidarCamera->PrimitiveRenderMode = ESceneCapturePrimitiveRenderMode::PRM_RenderScenePrimitives;
lidarCamera->ProjectionType = ECameraProjectionMode::Perspective;
lidarCamera->FOVAngle = 90.0;
lidarCamera->SetRelativeRotation(FRotator(0.0, 90.0*j, 0.0));
MainCamera2Ds.Add(lidarCamera);
}
float DirRotaNum = 360.0 / LidarLineNum;
for (int32 i = 0; i < LidarLineNum; i++)
{
USceneComponent* LidarParent = NewObject(GetOwner());
LidarParent->AttachToComponent(LidarRoot, FAttachmentTransformRules::KeepRelativeTransform);
LidarParent->RegisterComponent();
LidarParent->SetRelativeRotation(FRotator(0.0, DirRotaNum*i, 0.0));
LidarTmap.Add(i, LidarParent);
}
return LidarRoot->IsRegistered();
} 蓝图中调用:
运行:

结果:点坐标通过射线检测得到
