2.机器学习基础(一)
文章目录
- 第二章 机器学习基础
-
- 2.1 基本概念
-
- 2.1.1 什么是神经网络
- 2.1.2 各种常见算法图示
- 2.1.3 计算图的导数计算
- 2.1.4 理解局部最优与全局最优
- 2.1.5 大数据与深度学习之间的关系
- 2.2 机器学习学习方式
-
- 2.2.1 监督学习
- 2.2.2 非监督式学习
- 2.2.3 半监督式学习
- 2.2.4 弱监督学习
- 2.2.5 监督学习有哪些步骤
- 2.3 分类算法
-
- 2.3.1 常用分类算法的优缺点?
- 2.3.2 分类算法的评估方法
- 2.3.3 正确率能很好的评估分类算法吗
- 2.3.4 什么样的分类器是最好的
- 2.4 逻辑回归
-
- 2.4.1 回归划分
- 2.4.2 逻辑回归适用性
- 2.4.3 生成模型和判别模型的区别
- 2.4.4 逻辑回归与朴素贝叶斯有什么区别
- 2.4.5 线性回归与逻辑回归的区别
- 2.5 代价函数
-
- 2.5.1 为什么需要代价函数
- 2.5.2 代价函数作用原理
- 2.5.3 为什么代价函数要非负
- 2.5.4 常见代价函数
- 2.5.5 为什么用交叉熵代替二次代价函数
- 2.6 损失函数
-
- 2.6.1 什么是损失函数
- 2.6.2 常见的损失函数
- 2.6.3 逻辑回归为什么使用对数损失函数
- 2.6.4 对数损失函数是如何度量损失的
- 2.7 梯度下降
-
- 2.7.1 机器学习中为什么需要梯度下降
- 2.7.2 梯度下降法缺点
- 2.7.3 梯度下降法直观理解
- 2.7.4 梯度下降法算法描述
- 2.7.5 如何对梯度下降法进行调优
- 2.7.6 随机梯度和批量梯度区别
- 2.7.7 各种梯度下降法性能比较
- 参考文献
第二章 机器学习基础
机器学习的基本概念、监督学习、分类算法、逻辑回归、代价函数、损失函数、LDA、PCA、决策树、支持向量机、EM算法、聚类和降维以及模型评估有哪些方法、指标。
2.1 基本概念
2.1.1 什么是神经网络
神经网络就是按照一定规则将多个神经元连接起来的网络。不同的神经网络,具有不同的连接规则。
例如全连接(Full Connected, FC)神经网络,它的规则包括:
(1)有三种层:输入层,输出层,隐藏层。
(2)同一层的神经元之间没有连接。
(3)fully connected的含义:第 N 层的每个神经元和第 N-1 层的所有神经元相连,第 N-1 层神经元 的输出就是第 N 层神经元的输入。
(4)每个连接都有一个权值。
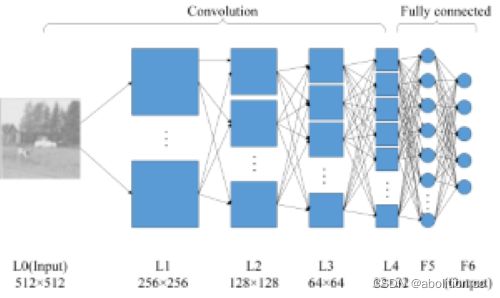
神经网络架构
图2-1就是一个神经网络系统,它由很多层组成。输入层负责接收信息,比如一只猫的图片。输出层是计算机对这个输入信息的判断结果,它是不是猫。隐藏层就是对输入信息的传递和加工处理。
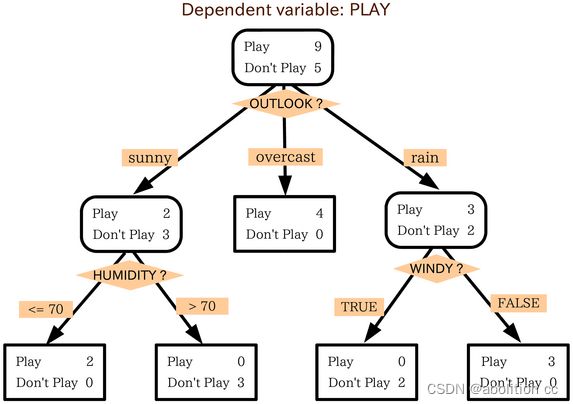
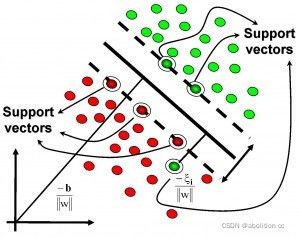
2.1.2 各种常见算法图示
日常使用机器学习的任务中,我们经常会遇见各种算法,图2-2是各种常见算法的图示。
| 回归算法 | 聚类算法 | 正则化方法 |
|---|---|---|
 |
 |
 |
| 决策树学习 | 贝叶斯方法 | 基于核的算法 |
|---|---|---|
 |
 |
 |
| 聚类算法 | 关联规则学习 | 人工神经网络 |
|---|---|---|
 |
 |
 |
| 深度学习 | 降低维度算法 | 集成算法 |
|---|---|---|
 |
 |
 |
2.1.3 计算图的导数计算
计算图导数计算是反向传播,利用链式法则和隐式函数求导。
可以说,一个神经网络的计算,都是按照前向或反向传播过程组织的。首先我们计算出 一个新的网络的输出(前向过程),紧接着进行一个反向传输操作。后者我们用来计算出对 应的梯度或导数。
假设 z = f ( u , v ) z = f(u,v) z=f(u,v) 在点 ( u , v ) (u,v) (u,v) 处偏导连续, ( u , v ) (u,v) (u,v)是关于 t t t 的函数,在 t t t 点可导,求 z z z 在 t t t 点的导数。
根据链式法则有
d z d t = ∂ z ∂ u . d u d t + ∂ z ∂ v . d v d t \frac{dz}{dt}=\frac{\partial z}{\partial u}.\frac{du}{dt}+\frac{\partial z}{\partial v} .\frac{dv}{dt} dtdz=∂u∂z.dtdu+∂v∂z.dtdv
2.1.4 理解局部最优与全局最优
优化问题一般分为局部最优(例如:贪心算法)和全局最优(例如:动态规划)。
(1)局部最优,就是在函数值空间的一个有限区域内寻找最小值;全局最优,是在函数值空间整个区 域寻找最小值问题。
(2)函数局部最小点是它的函数值小于或等于附近点的点,但是有可能大于较远距离的点。
(3)全局最小点是那种它的函数值小于或等于所有的可行点。
2.1.5 大数据与深度学习之间的关系
| 大数据 | 通常被定义为“超出常用软件工具捕获,管理和处理能力”的数据集。 |
|---|---|
| 机器学习 | 关心的问题是如何构建计算机程序使用经验自动改进。 |
| 数据挖掘 | 是从数据中提取模式的特定算法的应用,在数据挖掘中,重点在于算法的应用,而不是算法本身。 |
机器学习和数据挖掘之间的关系如下:
数据挖掘是一个过程,在此过程中机器学习算法被用作提取数据集中的潜在有价值模式的工具。
大数据与深度学习关系总结如下:
(1)深度学习是一种模拟大脑的行为。可以从所学习对象的机制以及行为等等很多相关联的方面进行学习,模仿类型行为以及思维。
(2)深度学习对于大数据的发展有帮助。深度学习对于大数据技术开发的每一个阶段均有帮助,不管是数据的分析还是挖掘还是建模,只有深度学习,这些工作才会有可能一一得到实现。
(3)深度学习转变了解决问题的思维。很多时候发现问题到解决问题,走一步看一步不是一个主要的解决问题的方式了,在深度学习的基础上,要求我们从开始到最后都要基于一个目标,为了需要优化的那个最终目标去进行处理数据以及将数据放入到数据应用平台上去,这就是端到端(End to End)。
(4)大数据的深度学习需要一个框架。在大数据方面的深度学习都是从基础的角度出发的,深度学习需要一个框架或者一个系统。总而言之,将你的大数据通过深度分析变为现实,这就是深度学习和大数据的最直接关系。
2.2 机器学习学习方式
2.2.1 监督学习
特点:监督学习是使用已知正确答案的示例来训练网络。已知数据和其一一对应的标签,训练一个预测模型,将输入数据映射到标签的过程。
常见应用场景:监督式学习的常见应用场景如分类问题和回归问题。
常见的有监督机器学习算法包括支持向量机(Support Vector Machine, SVM),朴素贝叶斯(Naive Bayes),逻辑回归(Logistic Regression),K近邻(K-Nearest Neighborhood, KNN),决策树(Decision Tree),随机森林(Random Forest),AdaBoost以及线性判别分析(Linear Discriminant Analysis, LDA)等。深度学习(Deep Learning)也是大多数以监督学习的方式呈现。
2.2.2 非监督式学习
定义:在非监督式学习中,数据并不被特别标识,适用于你具有数据集但无标签的情况。学习模型是为了推断出数据的一些内在结构。
常见应用场景:常见的应用场景包括关联规则的学习以及聚类等。
算法举例:常见算法包括Apriori算法以及k-Means算法。
2.2.3 半监督式学习
特点:在此学习方式下,输入数据部分被标记,部分没有被标记,这种学习模型可以用来进行预测。
常见应用场景:应用场景包括分类和回归,算法包括一些对常用监督式学习算法的延伸,通过对已标记数据建模,在此基础上,对未标记数据进行预测。
常见算法如图论推理算法(Graph Inference)或者拉普拉斯支持向量机(Laplacian SVM)等。
2.2.4 弱监督学习
特点:弱监督学习可以看做是有多个标记的数据集合,次集合可以是空集,单个元素,或包含多种情况(没有标记,有一个标记,和有多个标记)的多个元素。 数据集的标签是不可靠的,这里的不可靠可以是标记不正确,多种标记,标记不充分,局部标记等。已知数据和其一一对应的弱标签,训练一个智能算法,将输入数据映射到一组更强的标签的过程。标签的强弱指的是标签蕴含的信息量的多少,比如相对于分割的标签来说,分类的标签就是弱标签。
算法举例:举例,给出一张包含气球的图片,需要得出气球在图片中的位置及气球和背景的分割线,这就是已知弱标签学习强标签的问题。
在企业数据应用的场景下, 人们最常用的可能就是监督式学习和非监督式学习的模型。 在图像识别等领域,由于存在大量的非标识的数据和少量的可标识数据, 目前半监督式学习是一个很热的话题。
2.2.5 监督学习有哪些步骤
监督学习是使用已知正确答案的示例来训练网络,每组训练数据有一个明确的标识或结果。想象一下,我们可以训练一个网络,让其从照片库中(其中包含气球的照片)识别出气球的照片。以下就是我们在这个假设场景中所要采取的步骤。
步骤1:数据集的创建和分类
首先,浏览你的照片(数据集),确定所有包含气球的照片,并对其进行标注。然后,将所有照片分为训练集和验证集。目标就是在深度网络中找一函数,这个函数输入是任意一张照片,当照片中包含气球时,输出1,否则输出0。
步骤2:数据增强(Data Augmentation)
当原始数据搜集和标注完毕,一般搜集的数据并不一定包含目标在各种扰动下的信息。数据的好坏对于机器学习模型的预测能力至关重要,因此一般会进行数据增强。对于图像数据来说,数据增强一般包括,图像旋转,平移,颜色变换,裁剪,仿射变换等。
步骤3:特征工程(Feature Engineering)
一般来讲,特征工程包含特征提取和特征选择。常见的手工特征(Hand-Crafted Feature)有尺度不变特征变换(Scale-Invariant Feature Transform, SIFT),方向梯度直方图(Histogram of Oriented Gradient, HOG)等。由于手工特征是启发式的,其算法设计背后的出发点不同,将这些特征组合在一起的时候有可能会产生冲突,如何将组合特征的效能发挥出来,使原始数据在特征空间中的判别性最大化,就需要用到特征选择的方法。在深度学习方法大获成功之后,人们很大一部分不再关注特征工程本身。因为,最常用到的卷积神经网络(Convolutional Neural Networks, CNNs)本身就是一种特征提取和选择的引擎。研究者提出的不同的网络结构、正则化、归一化方法实际上就是深度学习背景下的特征工程。
步骤4:构建预测模型和损失
将原始数据映射到特征空间之后,也就意味着我们得到了比较合理的输入。下一步就是构建合适的预测模型得到对应输入的输出。而如何保证模型的输出和输入标签的一致性,就需要构建模型预测和标签之间的损失函数,常见的损失函数(Loss Function)有交叉熵、均方差等。通过优化方法不断迭代,使模型从最初的初始化状态一步步变化为有预测能力的模型的过程,实际上就是学习的过程。
步骤5:训练
选择合适的模型和超参数进行初始化,其中超参数比如支持向量机中核函数、误差项惩罚权重等。当模型初始化参数设定好后,将制作好的特征数据输入到模型,通过合适的优化方法不断缩小输出与标签之间的差距,当迭代过程到了截止条件,就可以得到训练好的模型。优化方法最常见的就是梯度下降法及其变种,使用梯度下降法的前提是优化目标函数对于模型是可导的。
步骤6:验证和模型选择
训练完训练集图片后,需要进行模型测试。利用验证集来验证模型是否可以准确地挑选出含有气球在内的照片。
在此过程中,通常会通过调整和模型相关的各种事物(超参数)来重复步骤2和3,诸如里面有多少个节点,有多少层,使用怎样的激活函数和损失函数,如何在反向传播阶段积极有效地训练权值等等。
步骤7:测试及应用
当有了一个准确的模型,就可以将该模型部署到你的应用程序中。你可以将预测功能发布为API(Application Programming Interface, 应用程序编程接口)调用,并且你可以从软件中调用该API,从而进行推理并给出相应的结果。
2.3 分类算法
分类算法和回归算法是对真实世界不同建模的方法。分类模型是认为模型的输出是离散的,例如大自然的生物被划分为不同的种类,是离散的。回归模型的输出是连续的,例如人的身高变化过程是一个连续过程,而不是离散的。
因此,在实际建模过程时,采用分类模型还是回归模型,取决于你对任务(真实世界)的分析和理解。
2.3.1 常用分类算法的优缺点?
接下来我们介绍常用分类算法的优缺点,如表2-1所示。
表2-1 常用分类算法的优缺点
| 算法 | 优点 | 缺点 |
|---|---|---|
| Bayes 贝叶斯分类法 | 1)所需估计的参数少,对于缺失数据不敏感。 2)有着坚实的数学基础,以及稳定的分类效率。 |
1)需要假设属性之间相互独立,这往往并不成立。(喜欢吃番茄、鸡蛋,却不喜欢吃番茄炒蛋)。 2)需要知道先验概率。 3)分类决策存在错误率。 |
| Decision Tree决策树 | 1)不需要任何领域知识或参数假设。 2)适合高维数据。 3)简单易于理解。 4)短时间内处理大量数据,得到可行且效果较好的结果。 5)能够同时处理数据型和常规性属性。 |
1)对于各类别样本数量不一致数据,信息增益偏向于那些具有更多数值的特征。 2)易于过拟合。 3)忽略属性之间的相关性。 4)不支持在线学习。 |
| SVM支持向量机 | 1)可以解决小样本下机器学习的问题。 2)提高泛化性能。 3)可以解决高维、非线性问题。超高维文本分类仍受欢迎。 4)避免神经网络结构选择和局部极小的问题。 |
1)对缺失数据敏感。 2)内存消耗大,难以解释。 3)运行和调参略烦人。 |
| KNN K近邻 | 1)思想简单,理论成熟,既可以用来做分类也可以用来做回归; 2)可用于非线性分类; 3)训练时间复杂度为O(n); 4)准确度高,对数据没有假设,对outlier不敏感; |
1)计算量太大。 2)对于样本分类不均衡的问题,会产生误判。 3)需要大量的内存。 4)输出的可解释性不强。 |
| Logistic Regression逻辑回归 | 1)速度快。 2)简单易于理解,直接看到各个特征的权重。 3)能容易地更新模型吸收新的数据。 4)如果想要一个概率框架,动态调整分类阀值。 |
特征处理复杂。需要归一化和较多的特征工程。 |
| Neural Network 神经网络 | 1)分类准确率高。 2)并行处理能力强。 3)分布式存储和学习能力强。 4)鲁棒性较强,不易受噪声影响。 |
1)需要大量参数(网络拓扑、阀值、阈值)。 2)结果难以解释。 3)训练时间过长。 |
| Adaboosting | 1)adaboost是一种有很高精度的分类器。 2)可以使用各种方法构建子分类器,Adaboost算法提供的是框架。 3)当使用简单分类器时,计算出的结果是可以理解的。而且弱分类器构造极其简单。 4)简单,不用做特征筛选。 5)不用担心overfitting。 |
对outlier比较敏感 |
2.3.2 分类算法的评估方法
分类评估方法主要功能是用来评估分类算法的好坏,而评估一个分类器算法的好坏又包括许多项指标。了解各种评估方法,在实际应用中选择正确的评估方法是十分重要的。
-
几个常用术语
这里首先介绍几个常见的模型评价术语,现在假设我们的分类目标只有两类,计为正例(positive)和负例(negative)分别是:- True positives(TP): 被正确地划分为正例的个数,即实际为正例且被分类器划分为正例的实例数;
- False positives(FP): 被错误地划分为正例的个数,即实际为负例但被分类器划分为正例的实例数;
- False negatives(FN):被错误地划分为负例的个数,即实际为正例但被分类器划分为负例的实例数;
- True negatives(TN): 被正确地划分为负例的个数,即实际为负例且被分类器划分为负例的实例数。
表2-2 四个术语的混淆矩阵
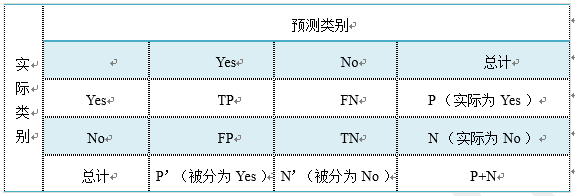
表2-2是这四个术语的混淆矩阵,做以下说明:
1)P=TP+FN表示实际为正例的样本个数。
2)True、False描述的是分类器是否判断正确。
3)Positive、Negative是分类器的分类结果,如果正例计为1、负例计为-1,即positive=1、negative=-1。用1表示True,-1表示False,那么实际的类标=TF*PN,TF为true或false,PN为positive或negative。
4)例如True positives(TP)的实际类标=1*1=1为正例,False positives(FP)的实际类标=(-1)*1=-1为负例,False negatives(FN)的实际类标=(-1)*(-1)=1为正例,True negatives(TN)的实际类标=1*(-1)=-1为负例。 -
评价指标
-
正确率(accuracy)
正确率是我们最常见的评价指标,accuracy = (TP+TN)/(P+N),正确率是被分对的样本数在所有样本数中的占比,通常来说,正确率越高,分类器越好。 -
错误率(error rate)
错误率则与正确率相反,描述被分类器错分的比例,error rate = (FP+FN)/(P+N),对某一个实例来说,分对与分错是互斥事件,所以accuracy =1 - error rate。 -
灵敏度(sensitivity)
sensitivity = TP/P,表示的是所有正例中被分对的比例,衡量了分类器对正例的识别能力。 -
特异性(specificity)
specificity = TN/N,表示的是所有负例中被分对的比例,衡量了分类器对负例的识别能力。 -
精度(precision)
precision=TP/(TP+FP),精度是精确性的度量,表示被分为正例的示例中实际为正例的比例。 -
召回率(recall)
召回率是覆盖面的度量,度量有多个正例被分为正例,recall=TP/(TP+FN)=TP/P=sensitivity,可以看到召回率与灵敏度是一样的。 -
其他评价指标
计算速度:分类器训练和预测需要的时间;
鲁棒性:处理缺失值和异常值的能力;
可扩展性:处理大数据集的能力;
可解释性:分类器的预测标准的可理解性,像决策树产生的规则就是很容易理解的,而神经网络的一堆参数就不好理解,我们只好把它看成一个黑盒子。 -
精度和召回率反映了分类器分类性能的两个方面。如果综合考虑查准率与查全率,可以得到新的评价指标F1-score,也称为综合分类率: F 1 = 2 × p r e c i s i o n × r e c a l l p r e c i s i o n + r e c a l l F1=\frac{2 \times precision \times recall}{precision + recall} F1=precision+recall2×precision×recall。
为了综合多个类别的分类情况,评测系统整体性能,经常采用的还有微平均F1(micro-averaging)和宏平均F1(macro-averaging )两种指标。
(1)宏平均F1与微平均F1是以两种不同的平均方式求的全局F1指标。
(2)宏平均F1的计算方法先对每个类别单独计算F1值,再取这些F1值的算术平均值作为全局指标。
(3)微平均F1的计算方法是先累加计算各个类别的a、b、c、d的值,再由这些值求出F1值。
(4)由两种平均F1的计算方式不难看出,宏平均F1平等对待每一个类别,所以它的值主要受到稀有类别的影响,而微平均F1平等考虑文档集中的每一个文档,所以它的值受到常见类别的影响比较大。
-
-
ROC曲线和PR曲线
如图2-3,ROC曲线是(Receiver Operating Characteristic Curve,受试者工作特征曲线)的简称,是以灵敏度(真阳性率)为纵坐标,以1减去特异性(假阳性率)为横坐标绘制的性能评价曲线。可以将不同模型对同一数据集的ROC曲线绘制在同一笛卡尔坐标系中,ROC曲线越靠近左上角,说明其对应模型越可靠。也可以通过ROC曲线下面的面积(Area Under Curve, AUC)来评价模型,AUC越大,模型越可靠。
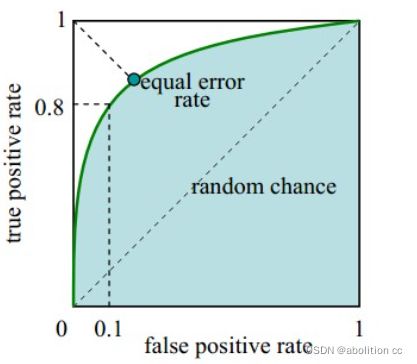
图2-3 ROC曲线
PR曲线是Precision Recall Curve的简称,描述的是precision和recall之间的关系,以recall为横坐标,precision为纵坐标绘制的曲线。该曲线的所对应的面积AUC实际上是目标检测中常用的评价指标平均精度(Average Precision, AP)。AP越高,说明模型性能越好。
2.3.3 正确率能很好的评估分类算法吗
不同算法有不同特点,在不同数据集上有不同的表现效果,根据特定的任务选择不同的算法。如何评价分类算法的好坏,要做具体任务具体分析。对于决策树,主要用正确率去评估,但是其他算法,只用正确率能很好的评估吗?
答案是否定的。
正确率确实是一个很直观很好的评价指标,但是有时候正确率高并不能完全代表一个算法就好。比如对某个地区进行地震预测,地震分类属性分为0:不发生地震、1发生地震。我们都知道,不发生的概率是极大的,对于分类器而言,如果分类器不加思考,对每一个测试样例的类别都划分为0,达到99%的正确率,但是,问题来了,如果真的发生地震时,这个分类器毫无察觉,那带来的后果将是巨大的。很显然,99%正确率的分类器并不是我们想要的。出现这种现象的原因主要是数据分布不均衡,类别为1的数据太少,错分了类别1但达到了很高的正确率缺忽视了研究者本身最为关注的情况。
2.3.4 什么样的分类器是最好的
对某一个任务,某个具体的分类器不可能同时满足或提高所有上面介绍的指标。
如果一个分类器能正确分对所有的实例,那么各项指标都已经达到最优,但这样的分类器往往不存在。比如之前说的地震预测,既然不能百分百预测地震的发生,但实际情况中能容忍一定程度的误报。假设在1000次预测中,共有5次预测发生了地震,真实情况中有一次发生了地震,其他4次则为误报。正确率由原来的999/1000=99.9下降为996/1000=99.6。召回率由0/1=0%上升为1/1=100%。对此解释为,虽然预测失误了4次,但真的地震发生前,分类器能预测对,没有错过,这样的分类器实际意义更为重大,正是我们想要的。在这种情况下,在一定正确率前提下,要求分类器的召回率尽量高。
2.4 逻辑回归
2.4.1 回归划分
广义线性模型家族里,依据因变量不同,可以有如下划分:
(1)如果是连续的,就是多重线性回归。
(2)如果是二项分布,就是逻辑回归。
(3)如果是泊松(Poisson)分布,就是泊松回归。
(4)如果是负二项分布,就是负二项回归。
(5)逻辑回归的因变量可以是二分类的,也可以是多分类的,但是二分类的更为常用,也更加容易解释。所以实际中最常用的就是二分类的逻辑回归。
2.4.2 逻辑回归适用性
逻辑回归可用于以下几个方面:
(1)用于概率预测。用于可能性预测时,得到的结果有可比性。比如根据模型进而预测在不同的自变量情况下,发生某病或某种情况的概率有多大。
(2)用于分类。实际上跟预测有些类似,也是根据模型,判断某人属于某病或属于某种情况的概率有多大,也就是看一下这个人有多大的可能性是属于某病。进行分类时,仅需要设定一个阈值即可,可能性高于阈值是一类,低于阈值是另一类。
(3)寻找危险因素。寻找某一疾病的危险因素等。
(4)仅能用于线性问题。只有当目标和特征是线性关系时,才能用逻辑回归。在应用逻辑回归时注意两点:一是当知道模型是非线性时,不适用逻辑回归;二是当使用逻辑回归时,应注意选择和目标为线性关系的特征。
(5)各特征之间不需要满足条件独立假设,但各个特征的贡献独立计算。
2.4.3 生成模型和判别模型的区别
生成模型:由数据学习联合概率密度分布P(X,Y),然后求出条件概率分布P(Y|X)作为预测的模型,即生成模型:P(Y|X)= P(X,Y)/ P(X)(贝叶斯概率)。基本思想是首先建立样本的联合概率概率密度模型P(X,Y),然后再得到后验概率P(Y|X),再利用它进行分类。典型的生成模型有朴素贝叶斯,隐马尔科夫模型等
判别模型:由数据直接学习决策函数Y=f(X)或者条件概率分布P(Y|X)作为预测的模型,即判别模型。基本思想是有限样本条件下建立判别函数,不考虑样本的产生模型,直接研究预测模型。典型的判别模型包括k近邻,感知级,决策树,支持向量机等。这些模型的特点都是输入属性X可以直接得到后验概率P(Y|X),输出条件概率最大的作为最终的类别(对于二分类任务来说,实际得到一个score,当score大于threshold时则为正类,否则为负类)。
举例:
判别式模型举例:要确定一个羊是山羊还是绵羊,用判别模型的方法是从历史数据中学习到模型,然后通过提取这只羊的特征来预测出这只羊是山羊的概率,是绵羊的概率。
生成式模型举例:利用生成模型是根据山羊的特征首先学习出一个山羊的模型,然后根据绵羊的特征学习出一个绵羊的模型,然后从这只羊中提取特征,放到山羊模型中看概率是多少,在放到绵羊模型中看概率是多少,哪个大就是哪个。
联系和区别:
生成方法的特点:上面说到,生成方法学习联合概率密度分布P(X,Y),所以就可以从统计的角度表示数据的分布情况,能够反映同类数据本身的相似度。但它不关心到底划分各类的那个分类边界在哪。生成方法可以还原出联合概率分布P(Y,X),而判别方法不能。生成方法的学习收敛速度更快,即当样本容量增加的时候,学到的模型可以更快的收敛于真实模型,当存在隐变量时,仍可以用生成方法学习。此时判别方法就不能用。
判别方法的特点:判别方法直接学习的是决策函数Y=f(X)或者条件概率分布P(Y|X)。不能反映训练数据本身的特性。但它寻找不同类别之间的最优分类面,反映的是异类数据之间的差异。直接面对预测,往往学习的准确率更高。由于直接学习P(Y|X)或P(X),可以对数据进行各种程度上的抽象、定义特征并使用特征,因此可以简化学习问题。
最后,由生成模型可以得到判别模型,但由判别模型得不到生成模型。
2.4.4 逻辑回归与朴素贝叶斯有什么区别
逻辑回归与朴素贝叶斯区别有以下几个方面:
(1)逻辑回归是判别模型, 朴素贝叶斯是生成模型,所以生成和判别的所有区别它们都有。
(2)朴素贝叶斯属于贝叶斯,逻辑回归是最大似然,两种概率哲学间的区别。
(3)朴素贝叶斯需要条件独立假设。
(4)逻辑回归需要求特征参数间是线性的。
2.4.5 线性回归与逻辑回归的区别
线性回归与逻辑回归的区别如下描述:
(1)线性回归的样本的输出,都是连续值,$ y\in (-\infty ,+\infty ) , 而 逻 辑 回 归 中 ,而逻辑回归中 ,而逻辑回归中y\in (0,1)$,只能取0和1。
(2)对于拟合函数也有本质上的差别:
线性回归: f ( x ) = θ T x = θ 1 x 1 + θ 2 x 2 + . . . + θ n x n f(x)=\theta ^{T}x=\theta _{1}x _{1}+\theta _{2}x _{2}+...+\theta _{n}x _{n} f(x)=θTx=θ1x1+θ2x2+...+θnxn
逻辑回归: f ( x ) = P ( y = 1 ∣ x ; θ ) = g ( θ T x ) f(x)=P(y=1|x;\theta )=g(\theta ^{T}x) f(x)=P(y=1∣x;θ)=g(θTx),其中, g ( z ) = 1 1 + e − z g(z)=\frac{1}{1+e^{-z}} g(z)=1+e−z1
可以看出,线性回归的拟合函数,是对f(x)的输出变量y的拟合,而逻辑回归的拟合函数是对为1类样本的概率的拟合。
那么,为什么要以1类样本的概率进行拟合呢,为什么可以这样拟合呢?
θ T x = 0 \theta ^{T}x=0 θTx=0就相当于是1类和0类的决策边界:
当 θ T x > 0 \theta ^{T}x>0 θTx>0,则y>0.5;若$\theta ^{T}x\rightarrow +\infty , 则 ,则 ,则y \rightarrow 1 $,即y为1类;
当 θ T x < 0 \theta ^{T}x<0 θTx<0,则y<0.5;若$\theta ^{T}x\rightarrow -\infty , 则 ,则 ,则y \rightarrow 0 $,即y为0类;
这个时候就能看出区别,在线性回归中 θ T x \theta ^{T}x θTx为预测值的拟合函数;而在逻辑回归中 θ T x \theta ^{T}x θTx为决策边界。下表2-3为线性回归和逻辑回归的区别。
表2-3 线性回归和逻辑回归的区别
| 线性回归 | 逻辑回归 | |
|---|---|---|
| 目的 | 预测 | 分类 |
| y ( i ) y^{(i)} y(i) | 未知 | (0,1) |
| 函数 | 拟合函数 | 预测函数 |
| 参数计算方式 | 最小二乘法 | 极大似然估计 |
下面具体解释一下:
- 拟合函数和预测函数什么关系呢?简单来说就是将拟合函数做了一个逻辑函数的转换,转换后使得 y ( i ) ∈ ( 0 , 1 ) y^{(i)} \in (0,1) y(i)∈(0,1);
- 最小二乘和最大似然估计可以相互替代吗?回答当然是不行了。我们来看看两者依仗的原理:最大似然估计是计算使得数据出现的可能性最大的参数,依仗的自然是Probability。而最小二乘是计算误差损失。
2.5 代价函数
2.5.1 为什么需要代价函数
- 为了得到训练逻辑回归模型的参数,需要一个代价函数,通过训练代价函数来得到参数。
- 用于找到最优解的目的函数。
2.5.2 代价函数作用原理
在回归问题中,通过代价函数来求解最优解,常用的是平方误差代价函数。假设函数图像如图2-4所示,当参数发生变化时,假设函数状态也会随着变化。
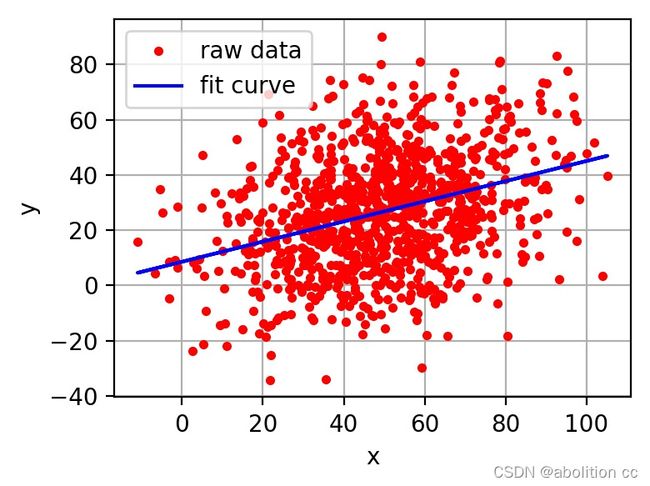
图2-4 h ( x ) = A + B x h(x) = A + Bx h(x)=A+Bx函数示意图
想要拟合图中的离散点,我们需要尽可能找到最优的 A A A和 B B B来使这条直线更能代表所有数据。如何找到最优解呢,这就需要使用代价函数来求解,以平方误差代价函数为例,假设函数为 h ( x ) = θ 0 x h(x)=\theta_0x h(x)=θ0x。
平方误差代价函数的主要思想就是将实际数据给出的值与拟合出的线的对应值做差,求出拟合出的直线与实际的差距。在实际应用中,为了避免因个别极端数据产生的影响,采用类似方差再取二分之一的方式来减小个别数据的影响。因此,引出代价函数:
J ( θ 0 , θ 1 ) = 1 m ∑ i = 1 m ( h ( x ( i ) ) − y ( i ) ) 2 J(\theta_0, \theta_1) = \frac{1}{m}\sum_{i=1}^m(h(x^{(i)})-y^{(i)})^2 J(θ0,θ1)=m1i=1∑m(h(x(i))−y(i))2
最优解即为代价函数的最小值 min J ( θ 0 , θ 1 ) \min J(\theta_0, \theta_1) minJ(θ0,θ1)。如果是1个参数,代价函数一般通过二维曲线便可直观看出。如果是2个参数,代价函数通过三维图像可看出效果,参数越多,越复杂。
当参数为2个时,代价函数是三维图像,如下图2-5所示。
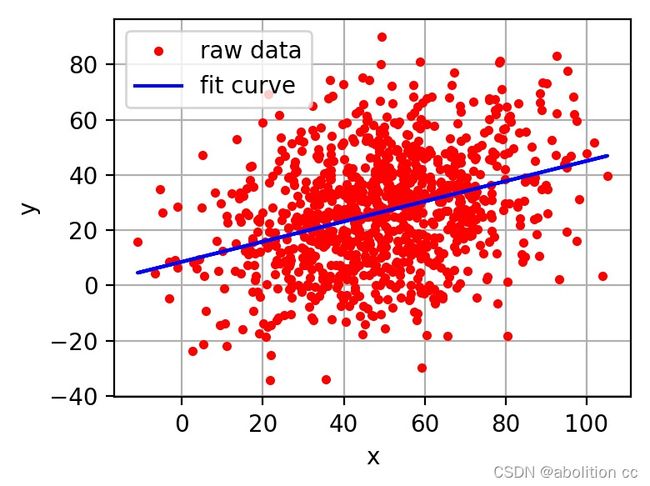 图2-5 代价函数三维图像
图2-5 代价函数三维图像
2.5.3 为什么代价函数要非负
目标函数存在一个下界,在优化过程当中,如果优化算法能够使目标函数不断减小,根据单调有界准则,这个优化算法就能证明是收敛有效的。
只要设计的目标函数有下界,基本上都可以,代价函数非负更为方便。
2.5.4 常见代价函数
(1)二次代价函数(quadratic cost):
J = 1 2 n ∑ x ∥ y ( x ) − a L ( x ) ∥ 2 J = \frac{1}{2n}\sum_x\Vert y(x)-a^L(x)\Vert^2 J=2n1x∑∥y(x)−aL(x)∥2
其中, J J J表示代价函数, x x x表示样本, y y y表示实际值, a a a表示输出值, n n n表示样本的总数。使用一个样本为例简单说明,此时二次代价函数为:
J = ( y − a ) 2 2 J = \frac{(y-a)^2}{2} J=2(y−a)2
假如使用梯度下降法(Gradient descent)来调整权值参数的大小,权值 w w w和偏置 b b b的梯度推导如下:
∂ J ∂ w = ( y − a ) σ ′ ( z ) x , ∂ J ∂ b = ( y − a ) σ ′ ( z ) \frac{\partial J}{\partial w}=(y-a)\sigma'(z)x\;, \frac{\partial J}{\partial b}=(y-a)\sigma'(z) ∂w∂J=(y−a)σ′(z)x,∂b∂J=(y−a)σ′(z)
其中, z z z表示神经元的输入, σ \sigma σ表示激活函数。权值 w w w和偏置 b b b的梯度跟激活函数的梯度成正比,激活函数的梯度越大,权值 w w w和偏置 b b b的大小调整得越快,训练收敛得就越快。
注:神经网络常用的激活函数为sigmoid函数,该函数的曲线如下图2-6所示:
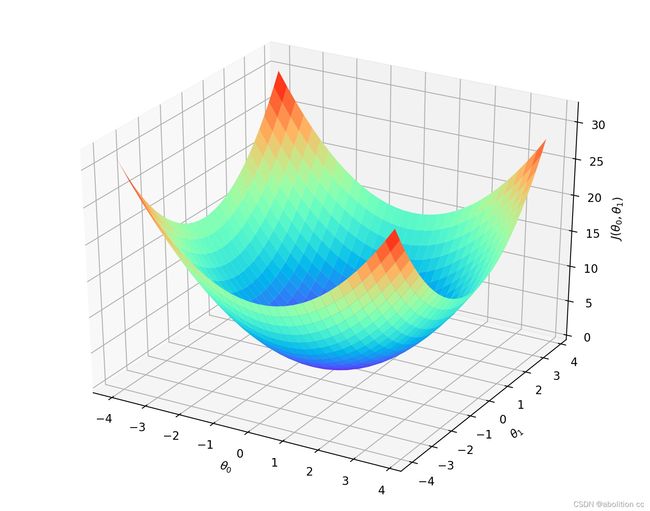
图2-6 sigmoid函数曲线
如上图所示,对0.88和0.98两个点进行比较:
假设目标是收敛到1.0。0.88离目标1.0比较远,梯度比较大,权值调整比较大。0.98离目标1.0比较近,梯度比较小,权值调整比较小。调整方案合理。
假如目标是收敛到0。0.88离目标0比较近,梯度比较大,权值调整比较大。0.98离目标0比较远,梯度比较小,权值调整比较小。调整方案不合理。
原因:在使用sigmoid函数的情况下, 初始的代价(误差)越大,导致训练越慢。
(2)交叉熵代价函数(cross-entropy):
J = − 1 n ∑ x [ y ln a + ( 1 − y ) ln ( 1 − a ) ] J = -\frac{1}{n}\sum_x[y\ln a + (1-y)\ln{(1-a)}] J=−n1x∑[ylna+(1−y)ln(1−a)]
其中, J J J表示代价函数, x x x表示样本, y y y表示实际值, a a a表示输出值, n n n表示样本的总数。
权值 w w w和偏置 b b b的梯度推导如下:
∂ J ∂ w j = 1 n ∑ x x j ( σ ( z ) − y ) , ∂ J ∂ b = 1 n ∑ x ( σ ( z ) − y ) \frac{\partial J}{\partial w_j}=\frac{1}{n}\sum_{x}x_j(\sigma{(z)}-y)\;, \frac{\partial J}{\partial b}=\frac{1}{n}\sum_{x}(\sigma{(z)}-y) ∂wj∂J=n1x∑xj(σ(z)−y),∂b∂J=n1x∑(σ(z)−y)
当误差越大时,梯度就越大,权值 w w w和偏置 b b b调整就越快,训练的速度也就越快。
二次代价函数适合输出神经元是线性的情况,交叉熵代价函数适合输出神经元是S型函数的情况。
(3)对数似然代价函数(log-likelihood cost):
对数似然函数常用来作为softmax回归的代价函数。深度学习中普遍的做法是将softmax作为最后一层,此时常用的代价函数是对数似然代价函数。
对数似然代价函数与softmax的组合和交叉熵与sigmoid函数的组合非常相似。对数似然代价函数在二分类时可以化简为交叉熵代价函数的形式。
在tensorflow中:
与sigmoid搭配使用的交叉熵函数:tf.nn.sigmoid_cross_entropy_with_logits()。
与softmax搭配使用的交叉熵函数:tf.nn.softmax_cross_entropy_with_logits()。
在pytorch中:
与sigmoid搭配使用的交叉熵函数:torch.nn.BCEWithLogitsLoss()。
与softmax搭配使用的交叉熵函数:torch.nn.CrossEntropyLoss()。
对数似然函数:
我们将似然函数作为机器学习模型的损失函数,并且用在分类问题中。这时似然函数是直接作用于模型的输出的(损失函数就是为了衡量当前参数下model的预测值predict距离真实值label的大小,所以似然函数用作损失函数时当然也是为了完成该任务),所以对于似然函数来说,这里的样本集就成了label集(而不是机器学习意义上的样本集X了),这里的参数也不是机器学习model 的参数,而是predict值。
其实作为损失函数的似然函数并不关心你当前的机器学习model的参数是怎样的,毕竟它此时所接收的输入只有两部分:1、predict。2、label 。3、分布模型(predict服从的分布)。
显然这里的label就是似然函数的观测值,即样本集。而它眼里的模型,当然就是predict这个随机变量所服从的概率分布模型。它的目的,就是衡量predict背后的模型对于当前观测值的解释程度。而每个样本的predict值,恰恰就是它所服从的分布模型的参数。
比如此时我们的机器学习任务是一个4个类别的分类任务,机器学习model的输出就是当前样本X下的每个类别的概率,如predict=[0.1, 0.1, 0.7, 0.1],而该样本的标签是类别3,表示成向量就是label=[0, 0, 1, 0]。那么label=[0, 0, 1, 0]就是似然函数眼里的样本,然后我们可以假设predict这个随机变量背后的模型是单次观测下的多项式分布,(因为softmax本身是基于多项式分布的)。
回顾:
伯努利分布,也叫做(0,1)分布,贝努利分布可以看成是将一枚硬币(只有正反两个面,代表两个类别)向上扔出,出现某个面(类别)的概率情况,因此其概率密度函数为:
f ( x ) = p x ( 1 − p ) 1 − x = { p , x = 1 q , x = 0 f(x)=p^x(1-p)^{1-x}= \begin{cases} p,& x=1\\ q,& x=0 \end{cases} f(x)=px(1−p)1−x={p,q,x=1x=0
这是理解似然函数做损失函数的关键!另外,贝努利分布的模型参数就是其中一个类别的发生概率。
而二项分布呢,就是将贝努利实验重复n次(各次实验之间是相互独立的)。
而多项式分布呢,就是将二项分布推广到多个面(类别)。
所以,单次观测下的多项式分布就是贝努利分布的多类推广!即:
f m u l i t ( x ; p ) = ∏ i = 1 C p i x i f_{mulit}(x;p)=\prod_{i=1}^C p_{i}^{xi} fmulit(x;p)=i=1∏Cpixi
其中,C代表类别数。p代表向量形式的模型参数,即各个类别的发生概率,如p=[0.1, 0.1, 0.7, 0.1],则p1=0.1, p3=0.7等。即,多项式分布的模型参数就是各个类别的发生概率!x代表one-hot形式的观测值,如x=类别3,则x=[0, 0, 1, 0]。xi代表x的第i个元素,比如x=类别3时,x1=0,x2=0,x3=1,x4=0。
想一下,机器学习model对某个样本的输出,就代表各个类别发生的概率。但是,对于当前这一个样本而言,它肯定只能有一个类别,所以这一个样本就可以看成是一次实验(观察),而这次实验(观察)的结果要服从上述各个类别发生的概率,那不就是服从多项式分布嘛!而且是单次观察!各个类别发生的概率predict当然就是这个多项式分布的参数。
总结一下,对于多类分类问题,似然函数就是衡量当前这个以predict为参数的单次观测下的多项式分布模型与样本值label之间的似然度。
所以,根据似然函数的定义,单个样本的似然函数即:
L = f m u l i t ( l a b e l ; p r e d i c t ) L = f_{mulit}(label;predict) L=fmulit(label;predict)
所以,整个样本集(或者一个batch)的似然函数即:
L = ∏ X f m u l t i ( l a b e l ; p r e d i c t ) = ∏ X ∏ i = 1 C p r e d i c t ( i ) l a b e l ( i ) L=\prod_{X}f_{multi}(label;predict)= \prod_{X}\prod_{i=1}^{C}predict(i)^{label(i)} L=X∏fmulti(label;predict)=X∏i=1∏Cpredict(i)label(i)
所以在累乘号前面加上log函数后,就成了所谓的对数似然函数:
L = ∑ X ∑ i = 1 C l a b e l ( i ) l o g ( p r e d i c t ( i ) ) L=\sum_{X}\sum_{i=1}^{C}label(i)log(predict(i)) L=X∑i=1∑Clabel(i)log(predict(i))
而最大化对数似然函数就等效于最小化负对数似然函数,所以前面加个负号就和交叉熵的形式相同的了。
交叉熵定义:对于某种分布的随机变量X~p(x), 有一个模型q(x)用于近似p(x)的概率分布,则分布X与模型q之间的交叉熵即:
H ( X , q ) = − ∑ x p ( x ) l o g q ( x ) H(X,q)=-\sum_{x}p(x)logq(x) H(X,q)=−x∑p(x)logq(x)
这里X的分布模型即样本集label的真实分布模型,这里模型q(x)即想要模拟真实分布模型的机器学习模型。可以说交叉熵是直接衡量两个分布,或者说两个model之间的差异。而似然函数则是解释以model的输出为参数的某分布模型对样本集的解释程度。因此,可以说这两者是“同貌不同源”,但是“殊途同归”啦。
tips:
最大似然估计:
给定一堆数据,假如我们知道它是从某一种分布中随机取出来的,可是我们并不知道这个分布具体的参,即“模型已定,参数未知”。例如,我们知道这个分布是正态分布,但是不知道均值和方差;或者是二项分布,但是不知道均值。最大似然估计(MLE,Maximum Likelihood Estimation)就可以用来估计模型的参数。MLE的目标是找出一组参数,使得模型产生出观测数据的概率最大。
2.5.5 为什么用交叉熵代替二次代价函数
(1)为什么不用二次方代价函数
由上一节可知,权值 w w w和偏置 b b b的偏导数为 ∂ J ∂ w = ( a − y ) σ ′ ( z ) x \frac{\partial J}{\partial w}=(a-y)\sigma'(z)x ∂w∂J=(a−y)σ′(z)x, ∂ J ∂ b = ( a − y ) σ ′ ( z ) \frac{\partial J}{\partial b}=(a-y)\sigma'(z) ∂b∂J=(a−y)σ′(z), 偏导数受激活函数的导数影响,sigmoid函数导数在输出接近0和1时非常小,会导致一些实例在刚开始训练时学习得非常慢。
(2)为什么要用交叉熵
交叉熵函数权值 w w w和偏置 b b b的梯度推导为:
∂ J ∂ w j = 1 n ∑ x x j ( σ ( z ) − y ) , ∂ J ∂ b = 1 n ∑ x ( σ ( z ) − y ) \frac{\partial J}{\partial w_j}=\frac{1}{n}\sum_{x}x_j(\sigma{(z)}-y)\;, \frac{\partial J}{\partial b}=\frac{1}{n}\sum_{x}(\sigma{(z)}-y) ∂wj∂J=n1x∑xj(σ(z)−y),∂b∂J=n1x∑(σ(z)−y)
由以上公式可知,权重学习的速度受到 σ ( z ) − y \sigma{(z)}-y σ(z)−y影响,更大的误差,就有更快的学习速度,避免了二次代价函数方程中因 σ ′ ( z ) \sigma'{(z)} σ′(z)导致的学习缓慢的情况。
2.6 损失函数
2.6.1 什么是损失函数
损失函数(Loss Function)又叫做误差函数,用来衡量算法的运行情况,估量模型的预测值与真实值的不一致程度,是一个非负实值函数,通常使用$
L(Y, f(x))$来表示。损失函数越小,模型的鲁棒性就越好。损失函数是经验风险函数的核心部分,也是结构风险函数重要组成部分。
2.6.2 常见的损失函数
机器学习通过对算法中的目标函数进行不断求解优化,得到最终想要的结果。分类和回归问题中,通常使用损失函数或代价函数作为目标函数。
损失函数用来评价预测值和真实值不一样的程度。通常损失函数越好,模型的性能也越好。
损失函数可分为经验风险损失函数和结构风险损失函数。经验风险损失函数指预测结果和实际结果的差别,结构风险损失函数是在经验风险损失函数上加上正则项。
下面介绍常用的损失函数:
(1)0-1损失函数
如果预测值和目标值相等,值为0,如果不相等,值为1。
L ( Y , f ( x ) ) = { 1 , Y ≠ f ( x ) 0 , Y = f ( x ) L(Y, f(x)) = \begin{cases} 1,& Y\ne f(x)\\ 0,& Y = f(x) \end{cases} L(Y,f(x))={1,0,Y=f(x)Y=f(x)
一般的在实际使用中,相等的条件过于严格,可适当放宽条件:
L ( Y , f ( x ) ) = { 1 , ∣ Y − f ( x ) ∣ ⩾ T 0 , ∣ Y − f ( x ) ∣ < T L(Y, f(x)) = \begin{cases} 1,& |Y-f(x)|\geqslant T\\ 0,& |Y-f(x)|< T \end{cases} L(Y,f(x))={1,0,∣Y−f(x)∣⩾T∣Y−f(x)∣<T
(2)绝对值损失函数
和0-1损失函数相似,绝对值损失函数表示为:
L ( Y , f ( x ) ) = ∣ Y − f ( x ) ∣ L(Y, f(x)) = |Y-f(x)| L(Y,f(x))=∣Y−f(x)∣
(3)平方损失函数
L ( Y , f ( x ) ) = ∑ N ( Y − f ( x ) ) 2 L(Y, f(x)) = \sum_N{(Y-f(x))}^2 L(Y,f(x))=N∑(Y−f(x))2
这点可从最小二乘法和欧几里得距离角度理解。最小二乘法的原理是,最优拟合曲线应该使所有点到回归直线的距离和最小。
(4)对数损失函数
L ( Y , P ( Y ∣ X ) ) = − log P ( Y ∣ X ) = − 1 N ∑ i = 1 N ∑ j = 1 M y i j l o g ( p i j ) L(Y, P(Y|X)) = -\log{P(Y|X)}=-\frac{1}{N}\sum_{i=1}^N\sum_{j=1}^M y_{ij}log(p_{ij}) L(Y,P(Y∣X))=−logP(Y∣X)=−N1i=1∑Nj=1∑Myijlog(pij)
其中, Y 为输出变量, X为输入变量, L 为损失函数. N为输入样本量, M为可能的类别数, y i j y_{ij} yij 是一个二值指标, 表示类别 j 是否是输入实例 xi 的真实类别. p i j p_{ij} pij 为模型或分类器预测输入实例 xi 属于类别 j 的概率.
常见的逻辑回归使用的就是对数损失函数,有很多人认为逻辑回归的损失函数是平方损失,其实不然。逻辑回归它假设样本服从伯努利分布(0-1分布),进而求得满足该分布的似然函数,接着取对数求极值等。逻辑回归推导出的经验风险函数是最小化负的似然函数,从损失函数的角度看,就是对数损失函数。形式上等价于二分类的交叉熵损失函数。
(6)指数损失函数
指数损失函数的标准形式为:
L ( Y , f ( x ) ) = exp ( − Y f ( x ) ) L(Y, f(x)) = \exp(-Yf(x)) L(Y,f(x))=exp(−Yf(x))
例如AdaBoost就是以指数损失函数为损失函数。
(7)Hinge损失函数
Hinge损失函数的标准形式如下:
L ( y ) = max ( 0 , 1 − t y ) L(y) = \max{(0, 1-ty)} L(y)=max(0,1−ty)
统一的形式:
L ( Y , f ( x ) ) = max ( 0 , Y f ( x ) ) L(Y, f(x)) = \max{(0, Yf(x))} L(Y,f(x))=max(0,Yf(x))
其中y是预测值,范围为(-1,1),t为目标值,其为-1或1。
在线性支持向量机中,最优化问题可等价于
w , b min ∑ i = 1 N ( 1 − y i ( w x i + b ) ) + λ ∥ w ∥ 2 \underset{\min}{w,b}\sum_{i=1}^N (1-y_i(wx_i+b))+\lambda\Vert w\Vert ^2 minw,bi=1∑N(1−yi(wxi+b))+λ∥w∥2
上式相似于下式
1 m ∑ i = 1 N l ( w x i + b y i ) + ∥ w ∥ 2 \frac{1}{m}\sum_{i=1}^{N}l(wx_i+by_i) + \Vert w\Vert ^2 m1i=1∑Nl(wxi+byi)+∥w∥2
其中 l ( w x i + b y i ) l(wx_i+by_i) l(wxi+byi)是Hinge损失函数, ∥ w ∥ 2 \Vert w\Vert ^2 ∥w∥2可看做为正则化项。
2.6.3 逻辑回归为什么使用对数损失函数
假设逻辑回归模型
P ( y = 1 ∣ x ; θ ) = 1 1 + e − θ T x P(y=1|x;\theta)=\frac{1}{1+e^{-\theta^{T}x}} P(y=1∣x;θ)=1+e−θTx1
假设逻辑回归模型的概率分布是伯努利分布,其概率质量函数为:
P ( X = n ) = { 1 − p , n = 0 p , n = 1 P(X=n)= \begin{cases} 1-p, n=0\\ p,n=1 \end{cases} P(X=n)={1−p,n=0p,n=1
其似然函数为:
L ( θ ) = ∏ i = 1 m P ( y = 1 ∣ x i ) y i P ( y = 0 ∣ x i ) 1 − y i L(\theta)=\prod_{i=1}^{m} P(y=1|x_i)^{y_i}P(y=0|x_i)^{1-y_i} L(θ)=i=1∏mP(y=1∣xi)yiP(y=0∣xi)1−yi
对数似然函数为:
ln L ( θ ) = ∑ i = 1 m [ y i ln P ( y = 1 ∣ x i ) + ( 1 − y i ) ln P ( y = 0 ∣ x i ) ] = ∑ i = 1 m [ y i ln P ( y = 1 ∣ x i ) + ( 1 − y i ) ln ( 1 − P ( y = 1 ∣ x i ) ) ] \ln L(\theta)=\sum_{i=1}^{m}[y_i\ln{P(y=1|x_i)}+(1-y_i)\ln{P(y=0|x_i)}]\\ =\sum_{i=1}^m[y_i\ln{P(y=1|x_i)}+(1-y_i)\ln(1-P(y=1|x_i))] lnL(θ)=i=1∑m[yilnP(y=1∣xi)+(1−yi)lnP(y=0∣xi)]=i=1∑m[yilnP(y=1∣xi)+(1−yi)ln(1−P(y=1∣xi))]
对数函数在单个数据点上的定义为:
c o s t ( y , p ( y ∣ x ) ) = − y ln p ( y ∣ x ) − ( 1 − y ) ln ( 1 − p ( y ∣ x ) ) cost(y,p(y|x))=-y\ln{p(y|x)-(1-y)\ln(1-p(y|x))} cost(y,p(y∣x))=−ylnp(y∣x)−(1−y)ln(1−p(y∣x))
则全局样本损失函数为:
c o s t ( y , p ( y ∣ x ) ) = − ∑ i = 1 m [ y i ln p ( y i ∣ x i ) + ( 1 − y i ) ln ( 1 − p ( y i ∣ x i ) ) ] cost(y,p(y|x)) = -\sum_{i=1}^m[y_i\ln p(y_i|x_i)+(1-y_i)\ln(1-p(y_i|x_i))] cost(y,p(y∣x))=−i=1∑m[yilnp(yi∣xi)+(1−yi)ln(1−p(yi∣xi))]
由此可看出,对数损失函数与极大似然估计的对数似然函数本质上是相同的。所以逻辑回归直接采用对数损失函数。
2.6.4 对数损失函数是如何度量损失的
例如,在高斯分布中,我们需要确定均值和标准差。
如何确定这两个参数?最大似然估计是比较常用的方法。最大似然的目标是找到一些参数值,这些参数值对应的分布可以最大化观测到数据的概率。
因为需要计算观测到所有数据的全概率,即所有观测到的数据点的联合概率。现考虑如下简化情况:
(1)假设观测到每个数据点的概率和其他数据点的概率是独立的。
(2)取自然对数。
假设观测到单个数据点 x i ( i = 1 , 2 , . . . n ) x_i(i=1,2,...n) xi(i=1,2,...n)的概率为:
P ( x i ; μ , σ ) = 1 σ 2 π exp ( − ( x i − μ ) 2 2 σ 2 ) P(x_i;\mu,\sigma)=\frac{1}{\sigma \sqrt{2\pi}}\exp \left( - \frac{(x_i-\mu)^2}{2\sigma^2} \right) P(xi;μ,σ)=σ2π1exp(−2σ2(xi−μ)2)
(3)其联合概率为:
P ( x 1 , x 2 , . . . , x n ; μ , σ ) = 1 σ 2 π exp ( − ( x 1 − μ ) 2 2 σ 2 ) × 1 σ 2 π exp ( − ( x 2 − μ ) 2 2 σ 2 ) × . . . × 1 σ 2 π exp ( − ( x n − μ ) 2 2 σ 2 ) P(x_1,x_2,...,x_n;\mu,\sigma)=\frac{1}{\sigma \sqrt{2\pi}}\exp \left( - \frac{(x_1-\mu)^2}{2\sigma^2} \right) \\ \times \frac{1}{\sigma \sqrt{2\pi}}\exp \left( - \frac{(x_2-\mu)^2}{2\sigma^2} \right) \times ... \times \frac{1}{\sigma \sqrt{2\pi}}\exp \left( - \frac{(x_n-\mu)^2}{2\sigma^2} \right) P(x1,x2,...,xn;μ,σ)=σ2π1exp(−2σ2(x1−μ)2)×σ2π1exp(−2σ2(x2−μ)2)×...×σ2π1exp(−2σ2(xn−μ)2)
对上式取自然对数,可得:
ln ( P ( x 1 , x 2 , . . . x n ; μ , σ ) ) = ln ( 1 σ 2 π ) − ( x 1 − μ ) 2 2 σ 2 + ln ( 1 σ 2 π ) − ( x 2 − μ ) 2 2 σ 2 + . . . + ln ( 1 σ 2 π ) − ( x n − μ ) 2 2 σ 2 \ln(P(x_1,x_2,...x_n;\mu,\sigma))= \ln \left(\frac{1}{\sigma \sqrt{2\pi}} \right) - \frac{(x_1-\mu)^2}{2\sigma^2} \\ + \ln \left( \frac{1}{\sigma \sqrt{2\pi}} \right) - \frac{(x_2-\mu)^2}{2\sigma^2} +...+ \ln \left( \frac{1}{\sigma \sqrt{2\pi}} \right) - \frac{(x_n-\mu)^2}{2\sigma^2} ln(P(x1,x2,...xn;μ,σ))=ln(σ2π1)−2σ2(x1−μ)2+ln(σ2π1)−2σ2(x2−μ)2+...+ln(σ2π1)−2σ2(xn−μ)2
根据对数定律,上式可以化简为:
ln ( P ( x 1 , x 2 , . . . x n ; μ , σ ) ) = − n ln ( σ ) − n 2 ln ( 2 π ) − 1 2 σ 2 [ ( x 1 − μ ) 2 + ( x 2 − μ ) 2 + . . . + ( x n − μ ) 2 ] \ln(P(x_1,x_2,...x_n;\mu,\sigma))=-n\ln(\sigma)-\frac{n}{2} \ln(2\pi)\\ -\frac{1}{2\sigma^2}[(x_1-\mu)^2+(x_2-\mu)^2+...+(x_n-\mu)^2] ln(P(x1,x2,...xn;μ,σ))=−nln(σ)−2nln(2π)−2σ21[(x1−μ)2+(x2−μ)2+...+(xn−μ)2]
然后求导为:
∂ ln ( P ( x 1 , x 2 , . . . , x n ; μ , σ ) ) ∂ μ = n σ 2 [ μ − ( x 1 + x 2 + . . . + x n ) ] \frac{\partial\ln(P(x_1,x_2,...,x_n;\mu,\sigma))}{\partial\mu}= \frac{n}{\sigma^2}[\mu - (x_1+x_2+...+x_n)] ∂μ∂ln(P(x1,x2,...,xn;μ,σ))=σ2n[μ−(x1+x2+...+xn)]
上式左半部分为对数损失函数。损失函数越小越好,因此我们令等式左半的对数损失函数为0,可得:
μ = x 1 + x 2 + . . . + x n n \mu=\frac{x_1+x_2+...+x_n}{n} μ=nx1+x2+...+xn
同理,可计算sigma。
2.7 梯度下降
2.7.1 机器学习中为什么需要梯度下降
梯度下降是机器学习中常见优化算法之一,梯度下降法有以下几个作用:
(1)梯度下降是迭代法的一种,可以用于求解最小二乘问题。
(2)在求解机器学习算法的模型参数,即无约束优化问题时,主要有梯度下降法(Gradient Descent)和最小二乘法。
(3)在求解损失函数的最小值时,可以通过梯度下降法来一步步的迭代求解,得到最小化的损失函数和模型参数值。
(4)如果我们需要求解损失函数的最大值,可通过梯度上升法来迭代。梯度下降法和梯度上升法可相互转换。
(5)在机器学习中,梯度下降法主要有随机梯度下降法和批量梯度下降法。
2.7.2 梯度下降法缺点
梯度下降法缺点有以下几点:
(1)靠近极小值时收敛速度减慢。
(2)直线搜索时可能会产生一些问题。
(3)可能会“之字形”地下降。
梯度概念也有需注意的地方:
(1)梯度是一个向量,即有方向有大小。
(2)梯度的方向是最大方向导数的方向。
(3)梯度的值是最大方向导数的值。
2.7.3 梯度下降法直观理解
梯度下降法经典图示如下图2.7所示:

图2.7 梯度下降法经典图示
形象化举例,由上图2.7所示,假如最开始,我们在一座大山上的某处位置,因为到处都是陌生的,不知道下山的路,所以只能摸索着根据直觉,走一步算一步,在此过程中,每走到一个位置的时候,都会求解当前位置的梯度,沿着梯度的负方向,也就是当前最陡峭的位置向下走一步,然后继续求解当前位置梯度,向这一步所在位置沿着最陡峭最易下山的位置走一步。不断循环求梯度,就这样一步步地走下去,一直走到我们觉得已经到了山脚。当然这样走下去,有可能我们不能走到山脚,而是到了某一个局部的山势低处。
由此,从上面的解释可以看出,梯度下降不一定能够找到全局的最优解,有可能是一个局部的最优解。当然,如果损失函数是凸函数,梯度下降法得到的解就一定是全局最优解。
核心思想归纳:
(1)初始化参数,随机选取取值范围内的任意数;
(2)迭代操作:
a)计算当前梯度;
b)修改新的变量;
c)计算朝最陡的下坡方向走一步;
d)判断是否需要终止,如否,返回a);
(3)得到全局最优解或者接近全局最优解。
2.7.4 梯度下降法算法描述
梯度下降法算法步骤如下:
(1)确定优化模型的假设函数及损失函数。
举例,对于线性回归,假设函数为:
h θ ( x 1 , x 2 , . . . , x n ) = θ 0 + θ 1 x 1 + . . . + θ n x n h_\theta(x_1,x_2,...,x_n)=\theta_0+\theta_1x_1+...+\theta_nx_n hθ(x1,x2,...,xn)=θ0+θ1x1+...+θnxn
其中, θ i , x i ( i = 0 , 1 , 2 , . . . , n ) \theta_i,x_i(i=0,1,2,...,n) θi,xi(i=0,1,2,...,n)分别为模型参数、每个样本的特征值。
对于假设函数,损失函数为:
J ( θ 0 , θ 1 , . . . , θ n ) = 1 2 m ∑ j = 0 m ( h θ ( x 0 ( j ) , x 1 ( j ) , . . . , x n ( j ) ) − y j ) 2 J(\theta_0,\theta_1,...,\theta_n)=\frac{1}{2m}\sum^{m}_{j=0}(h_\theta (x^{(j)}_0 ,x^{(j)}_1,...,x^{(j)}_n)-y_j)^2 J(θ0,θ1,...,θn)=2m1j=0∑m(hθ(x0(j),x1(j),...,xn(j))−yj)2
(2)相关参数初始化。
主要初始化 θ i {\theta}_i θi、算法迭代步长${\alpha} 、 终 止 距 离 、终止距离 、终止距离{\zeta} 。 初 始 化 时 可 以 根 据 经 验 初 始 化 , 即 。初始化时可以根据经验初始化,即 。初始化时可以根据经验初始化,即{\theta} 初 始 化 为 0 , 步 长 初始化为0,步长 初始化为0,步长{\alpha} 初 始 化 为 1 。 当 前 步 长 记 为 初始化为1。当前步长记为 初始化为1。当前步长记为{\varphi}_i $。当然,也可随机初始化。
(3)迭代计算。
1)计算当前位置时损失函数的梯度,对${\theta}_i $,其梯度表示为:
∂ ∂ θ i J ( θ 0 , θ 1 , . . . , θ n ) = 1 2 m ∑ j = 0 m ( h θ ( x 0 ( j ) , x 1 ( j ) , . . . , x n ( j ) ) − y j ) 2 \frac{\partial}{\partial \theta_i}J({\theta}_0,{\theta}_1,...,{\theta}_n)=\frac{1}{2m}\sum^{m}_{j=0}(h_\theta (x^{(j)}_0 ,x^{(j)}_1,...,x^{(j)}_n)-y_j)^2 ∂θi∂J(θ0,θ1,...,θn)=2m1j=0∑m(hθ(x0(j),x1(j),...,xn(j))−yj)2
2)计算当前位置下降的距离。
φ i = α ∂ ∂ θ i J ( θ 0 , θ 1 , . . . , θ n ) {\varphi}_i={\alpha} \frac{\partial}{\partial \theta_i}J({\theta}_0,{\theta}_1,...,{\theta}_n) φi=α∂θi∂J(θ0,θ1,...,θn)
3)判断是否终止。
确定是否所有 θ i {\theta}_i θi梯度下降的距离 φ i {\varphi}_i φi都小于终止距离 ζ {\zeta} ζ,如果都小于 ζ {\zeta} ζ,则算法终止,当然的值即为最终结果,否则进入下一步。
4)更新所有的 θ i {\theta}_i θi,更新后的表达式为:
θ i = θ i − α ∂ ∂ θ i J ( θ 0 , θ 1 , . . . , θ n ) {\theta}_i={\theta}_i-\alpha \frac{\partial}{\partial \theta_i}J({\theta}_0,{\theta}_1,...,{\theta}_n) θi=θi−α∂θi∂J(θ0,θ1,...,θn)
θ i = θ i − α 1 m ∑ j = 0 m ( h θ ( x 0 ( j ) , x 1 ( j ) , . . . , x n ( j ) ) − y j ) x i ( j ) \theta_i=\theta_i - \alpha \frac{1}{m} \sum^{m}_{j=0}(h_\theta (x^{(j)}_0 ,x^{(j)}_1,...,x^{(j)}_n)-y_j)x^{(j)}_i θi=θi−αm1j=0∑m(hθ(x0(j),x1(j),...,xn(j))−yj)xi(j)
5)令上式 x 0 ( j ) = 1 x^{(j)}_0=1 x0(j)=1,更新完毕后转入1)。
由此,可看出,当前位置的梯度方向由所有样本决定,上式中 1 m \frac{1}{m} m1、 α 1 m \alpha \frac{1}{m} αm1 的目的是为了便于理解。
2.7.5 如何对梯度下降法进行调优
实际使用梯度下降法时,各项参数指标不能一步就达到理想状态,对梯度下降法调优主要体现在以下几个方面:
(1)算法迭代步长 α \alpha α选择。
在算法参数初始化时,有时根据经验将步长初始化为1。实际取值取决于数据样本。可以从大到小,多取一些值,分别运行算法看迭代效果,如果损失函数在变小,则取值有效。如果取值无效,说明要增大步长。但步长太大,有时会导致迭代速度过快,错过最优解。步长太小,迭代速度慢,算法运行时间长。
(2)参数的初始值选择。
初始值不同,获得的最小值也有可能不同,梯度下降有可能得到的是局部最小值。如果损失函数是凸函数,则一定是最优解。由于有局部最优解的风险,需要多次用不同初始值运行算法,关键损失函数的最小值,选择损失函数最小化的初值。
(3)标准化处理。
由于样本不同,特征取值范围也不同,导致迭代速度慢。为了减少特征取值的影响,可对特征数据标准化,使新期望为0,新方差为1,可节省算法运行时间。
2.7.6 随机梯度和批量梯度区别
随机梯度下降(SGD)和批量梯度下降(BGD)是两种主要梯度下降法,其目的是增加某些限制来加速运算求解。
下面通过介绍两种梯度下降法的求解思路,对其进行比较。
假设函数为:
h θ ( x 0 , x 1 , . . . , x 3 ) = θ 0 x 0 + θ 1 x 1 + . . . + θ n x n h_\theta (x_0,x_1,...,x_3) = \theta_0 x_0 + \theta_1 x_1 + ... + \theta_n x_n hθ(x0,x1,...,x3)=θ0x0+θ1x1+...+θnxn
损失函数为:
J ( θ 0 , θ 1 , . . . , θ n ) = 1 2 m ∑ j = 0 m ( h θ ( x 0 j , x 1 j , . . . , x n j ) − y j ) 2 J(\theta_0, \theta_1, ... , \theta_n) = \frac{1}{2m} \sum^{m}_{j=0}(h_\theta (x^{j}_0 ,x^{j}_1,...,x^{j}_n)-y^j)^2 J(θ0,θ1,...,θn)=2m1j=0∑m(hθ(x0j,x1j,...,xnj)−yj)2
其中, m m m为样本个数, j j j为参数个数。
1、 批量梯度下降的求解思路如下:
a) 得到每个$ \theta $对应的梯度:
∂ ∂ θ i J ( θ 0 , θ 1 , . . . , θ n ) = 1 m ∑ j = 0 m ( h θ ( x 0 j , x 1 j , . . . , x n j ) − y j ) x i j \frac{\partial}{\partial \theta_i}J({\theta}_0,{\theta}_1,...,{\theta}_n)=\frac{1}{m}\sum^{m}_{j=0}(h_\theta (x^{j}_0 ,x^{j}_1,...,x^{j}_n)-y^j)x^{j}_i ∂θi∂J(θ0,θ1,...,θn)=m1j=0∑m(hθ(x0j,x1j,...,xnj)−yj)xij
b) 由于是求最小化风险函数,所以按每个参数 $ \theta $ 的梯度负方向更新 $ \theta_i $ :
θ i = θ i − 1 m ∑ j = 0 m ( h θ ( x 0 j , x 1 j , . . . , x n j ) − y j ) x i j \theta_i=\theta_i - \frac{1}{m} \sum^{m}_{j=0}(h_\theta (x^{j}_0 ,x^{j}_1,...,x^{j}_n)-y^j)x^{j}_i θi=θi−m1j=0∑m(hθ(x0j,x1j,...,xnj)−yj)xij
c) 从上式可以注意到,它得到的虽然是一个全局最优解,但每迭代一步,都要用到训练集所有的数据,如果样本数据很大,这种方法迭代速度就很慢。
相比而言,随机梯度下降可避免这种问题。
2、随机梯度下降的求解思路如下:
a) 相比批量梯度下降对应所有的训练样本,随机梯度下降法中损失函数对应的是训练集中每个样本的粒度。
损失函数可以写成如下这种形式,
J ( θ 0 , θ 1 , . . . , θ n ) = 1 m ∑ j = 0 m ( y j − h θ ( x 0 j , x 1 j , . . . , x n j ) ) 2 = 1 m ∑ j = 0 m c o s t ( θ , ( x j , y j ) ) J(\theta_0, \theta_1, ... , \theta_n) = \frac{1}{m} \sum^{m}_{j=0}(y^j - h_\theta (x^{j}_0 ,x^{j}_1,...,x^{j}_n))^2 = \frac{1}{m} \sum^{m}_{j=0} cost(\theta,(x^j,y^j)) J(θ0,θ1,...,θn)=m1j=0∑m(yj−hθ(x0j,x1j,...,xnj))2=m1j=0∑mcost(θ,(xj,yj))
b)对每个参数 $ \theta$ 按梯度方向更新 $ \theta$:
θ i = θ i + ( y j − h θ ( x 0 j , x 1 j , . . . , x n j ) ) \theta_i = \theta_i + (y^j - h_\theta (x^{j}_0, x^{j}_1, ... ,x^{j}_n)) θi=θi+(yj−hθ(x0j,x1j,...,xnj))
c) 随机梯度下降是通过每个样本来迭代更新一次。
随机梯度下降伴随的一个问题是噪音较批量梯度下降要多,使得随机梯度下降并不是每次迭代都向着整体最优化方向。
小结:
随机梯度下降法、批量梯度下降法相对来说都比较极端,简单对比如下:
| 方法 | 特点 |
|---|---|
| 批量梯度下降 | a)采用所有数据来梯度下降。 b)批量梯度下降法在样本量很大的时候,训练速度慢。 |
| 随机梯度下降 | a)随机梯度下降用一个样本来梯度下降。 b)训练速度很快。 c)随机梯度下降法仅仅用一个样本决定梯度方向,导致解有可能不是全局最优。 d)收敛速度来说,随机梯度下降法一次迭代一个样本,导致迭代方向变化很大,不能很快的收敛到局部最优解。 |
下面介绍能结合两种方法优点的小批量梯度下降法。
3、 小批量(Mini-Batch)梯度下降的求解思路如下
对于总数为 m m m个样本的数据,根据样本的数据,选取其中的 n ( 1 < n < m ) n(1< n< m) n(1<n<m)个子样本来迭代。其参数 θ \theta θ按梯度方向更新 θ i \theta_i θi公式如下:
θ i = θ i − α ∑ j = t t + n − 1 ( h θ ( x 0 j , x 1 j , . . . , x n j ) − y j ) x i j \theta_i = \theta_i - \alpha \sum^{t+n-1}_{j=t} ( h_\theta (x^{j}_{0}, x^{j}_{1}, ... , x^{j}_{n} ) - y^j ) x^{j}_{i} θi=θi−αj=t∑t+n−1(hθ(x0j,x1j,...,xnj)−yj)xij
2.7.7 各种梯度下降法性能比较
下表简单对比随机梯度下降(SGD)、批量梯度下降(BGD)、小批量梯度下降(Mini-batch GD)、和Online GD的区别:
| BGD | SGD | Mini-batch GD | Online GD | |
|---|---|---|---|---|
| 训练集 | 固定 | 固定 | 固定 | 实时更新 |
| 单次迭代样本数 | 整个训练集 | 单个样本 | 训练集的子集 | 根据具体算法定 |
| 算法复杂度 | 高 | 低 | 一般 | 低 |
| 时效性 | 低 | 一般 | 一般 | 高 |
| 收敛性 | 稳定 | 不稳定 | 较稳定 | 不稳定 |
BGD、SGD、Mini-batch GD,前面均已讨论过,这里介绍一下Online GD。
Online GD于Mini-batch GD/SGD的区别在于,所有训练数据只用一次,然后丢弃。这样做的优点在于可预测最终模型的变化趋势。
Online GD在互联网领域用的较多,比如搜索广告的点击率(CTR)预估模型,网民的点击行为会随着时间改变。用普通的BGD算法(每天更新一次)一方面耗时较长(需要对所有历史数据重新训练);另一方面,无法及时反馈用户的点击行为迁移。而Online GD算法可以实时的依据网民的点击行为进行迁移。
参考文献
[1] Goodfellow I, Bengio Y, Courville A. Deep learning[M]. MIT press, 2016.
[2] 周志华. 机器学习[M].清华大学出版社, 2016.
[3] Michael A. Nielsen. “Neural Networks and Deep Learning”, Determination Press, 2015.
[4] Suryansh S. Gradient Descent: All You Need to Know, 2018.
[5] 刘建平. 梯度下降小结,EM算法的推导, 2018
[6] 杨小兵.聚类分析中若干关键技术的研究[D]. 杭州:浙江大学, 2005.
[7] XU Rui, Donald Wunsch 1 1. survey of clustering algorithm[J].IEEE.Transactions on Neural Networks, 2005, 16(3):645-67 8.
[8] YI Hong, SAM K. Learning assignment order of instances for the constrained k-means clustering algorithm[J].IEEE Transactions on Systems, Man, and Cybernetics, Part B:Cybernetics,2009,39 (2):568-574.
[9] 贺玲, 吴玲达, 蔡益朝.数据挖掘中的聚类算法综述[J].计算机应用研究, 2007, 24(1):10-13.
[10] 孙吉贵, 刘杰, 赵连宇.聚类算法研究[J].软件学报, 2008, 19(1):48-61.
[11] 孔英会, 苑津莎, 张铁峰等.基于数据流管理技术的配变负荷分类方法研究.中国国际供电会议, CICED2006.
[12] 马晓艳, 唐雁.层次聚类算法研究[J].计算机科学, 2008, 34(7):34-36.
[13] FISHER R A. Iris Plants Database https://www.ics.uci.edu/vmlearn/MLRepository.html, Authorized license.
[14] Quinlan J R. Induction of decision trees[J]. Machine learning, 1986, 1(1): 81-106.
[15] Breiman L. Random forests[J]. Machine learning, 2001, 45(1): 5-32.