从零开发一个Python项目,手势识别!
最近开发了一个手势处理的项目(零基础也可以学,就是针对零基础的),我在这儿简单的复述一下原理,总体来说还是比较简单的,主要运用的知识就是opencv,python基本语法,图像处理基础知识。
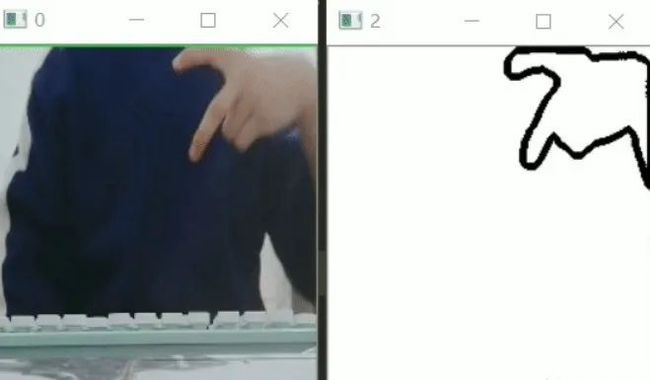
最终实现结果:
获取视频(摄像头)
这部分没啥说的,就是获取摄像头。
cap = cv2.VideoCapture("C:/Users/lenovo/Videos/1.mp4")#读取文件
#cap = cv2.VideoCapture(0)#读取摄像头
while(True):
ret, frame = cap.read() key = cv2.waitKey(50) & 0xFF
if key == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
肤色检测
这里使用的是椭圆肤色检测模型。
在RGB空间里人脸的肤色受亮度影响相当大,所以肤色点很难从非肤色点中分离出来,也就是说在此空间经过处理后,肤色点是离散的点,中间嵌有很多非肤色,这为肤色区域标定(人脸标定、眼睛等)带来了难题。
如果把RGB转为YCrCb空间的话,可以忽略Y(亮度)的影响,因为该空间受亮度影响很小,肤色会产生很好的类聚。
这样就把三维的空间将为二维的CrCb,肤色点会形成一定得形状,如:人脸的话会看到一个人脸的区域,手臂的话会看到一条手臂的形态。
def A(img):
YCrCb = cv2.cvtColor(img, cv2.COLOR_BGR2YCR_CB) #转换至YCrCb空间
(y,cr,cb) = cv2.split(YCrCb) #拆分出Y,Cr,Cb值
cr1 = cv2.GaussianBlur(cr, (5,5), 0)
_, skin = cv2.threshold(cr1, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU) #Ostu处理
res = cv2.bitwise_and(img,img, mask = skin)
return res
轮廓处理
轮廓处理的话主要用到两个函数,cv2.findContours和cv2.drawContours,这两个函数的使用使用方法很容易搜到就不说了,这部分主要的问题是提取到的轮廓有很多个,但是我们只需要手的轮廓,所以我们要用sorted函数找到最大的轮廓。
def B(img):
#binaryimg = cv2.Canny(Laplacian, 50, 200) #二值化,canny检测
h = cv2.findContours(img,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_NONE) #寻找轮廓
contour = h[0]
contour = sorted(contour, key = cv2.contourArea, reverse=True)#已轮廓区域面积进行排序
#contourmax = contour[0][:, 0, :]#保留区域面积最大的轮廓点坐标
bg = np.ones(dst.shape, np.uint8) *255#创建白色幕布
ret = cv2.drawContours(bg,contour[0],-1,(0,0,0),3) #绘制黑色轮廓
return ret
全部代码
""" 从视频读取帧保存为图片"""
import cv2
import numpy as np
cap = cv2.VideoCapture("C:/Users/lenovo/Videos/1.mp4")#读取文件
#cap = cv2.VideoCapture(0)#读取摄像头
#皮肤检测
def A(img):
YCrCb = cv2.cvtColor(img, cv2.COLOR_BGR2YCR_CB) #转换至YCrCb空间
(y,cr,cb) = cv2.split(YCrCb) #拆分出Y,Cr,Cb值
cr1 = cv2.GaussianBlur(cr, (5,5), 0)
_, skin = cv2.threshold(cr1, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU) #Ostu处理
res = cv2.bitwise_and(img,img, mask = skin)
return res
def B(img):
#binaryimg = cv2.Canny(Laplacian, 50, 200) #二值化,canny检测
h = cv2.findContours(img,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_NONE) #寻找轮廓
contour = h[0]
contour = sorted(contour, key = cv2.contourArea, reverse=True)#已轮廓区域面积进行排序
#contourmax = contour[0][:, 0, :]#保留区域面积最大的轮廓点坐标
bg = np.ones(dst.shape, np.uint8) *255#创建白色幕布
ret = cv2.drawContours(bg,contour[0],-1,(0,0,0),3) #绘制黑色轮廓
return ret
while(True):
ret, frame = cap.read()
#下面三行可以根据自己的电脑进行调节
src = cv2.resize(frame,(400,350), interpolation=cv2.INTER_CUBIC)#窗口大小
cv2.rectangle(src, (90, 60), (300, 300 ), (0, 255, 0))#框出截取位置
roi = src[60:300 , 90:300] # 获取手势框图
res = A(roi) # 进行肤色检测
cv2.imshow("0",roi)
gray = cv2.cvtColor(res, cv2.COLOR_BGR2GRAY)
dst = cv2.Laplacian(gray, cv2.CV_16S, ksize = 3)
Laplacian = cv2.convertScaleAbs(dst)
contour = B(Laplacian)#轮廓处理
cv2.imshow("2",contour)
key = cv2.waitKey(50) & 0xFF
if key == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
感兴趣的小伙伴,赠送全套Python学习资料,包含面试题、简历资料等具体看下方。
一、Python所有方向的学习路线
Python所有方向的技术点做的整理,形成各个领域的知识点汇总,它的用处就在于,你可以按照下面的知识点去找对应的学习资源,保证自己学得较为全面。


二、Python必备开发工具
工具都帮大家整理好了,安装就可直接上手!
三、最新Python学习笔记
当我学到一定基础,有自己的理解能力的时候,会去阅读一些前辈整理的书籍或者手写的笔记资料,这些笔记详细记载了他们对一些技术点的理解,这些理解是比较独到,可以学到不一样的思路。

四、Python视频合集
观看全面零基础学习视频,看视频学习是最快捷也是最有效果的方式,跟着视频中老师的思路,从基础到深入,还是很容易入门的。

五、实战案例
纸上得来终觉浅,要学会跟着视频一起敲,要动手实操,才能将自己的所学运用到实际当中去,这时候可以搞点实战案例来学习。

六、面试宝典


简历模板
若有侵权,请联系删除