正点原子嵌入式linux驱动开发——Linux PWM驱动
PWM是很常用到功能,可以通过PWM来控制电机速度,也可以使用PWM来控制LCD的背光亮度。本章就来学习一下如何在Linux下进行PWM驱动开发。
PWM驱动解析
不在介绍PWM是什么了,直接进入使用。
给LCD的背光引脚输入一个PWM信号,这样就可以通过调整占空比的方式来调整LCD背光亮度了。提高占空比就会提高背光亮度,降低占空比就会降低背光亮度,重点就在于PWM信号的产生和占空比的控制。
设备树下PWM控制器节点
定时器节点
STM32MP157有很多路PWM,这些PWM都是由定时器产生的:
- TIM1/TIM8:这2个是16位高级定时器,主要用于电机控制。这两个定时器支持PWM型号,每个定时器支持4通道PWM信号。
- TIM2/TIM3/TIM4/TIM5:这4个是通用定时器,TIM3/TIM4是16位定时器,TIM2/TIM5是32位定时器。这4个定时器也支持PWM输出,每个定时器支持4通道PWM信号。
- TIM12/TIM13/TIM14:这3个都是16 位的通用定时器,TIM12支持2通道的PWM信号,TIM13/TIM14这两个定时器每个只支持1个通道的PWM信号。
- TIM15/TIM16/TIM17:这3个也都是16位的通用定时器,TIM15支持2通道的PWM信号,TIM16/TIM17每个定时器支持1通道的PWM信号。
可以看出,STM32MP157的PWM通道非常多,不同的PWM通道功能也不同,可以
根据实际情况选择合适的PWM通道。本节使用PA10这个引脚来实现PWM功能,注意!PA10这个引脚被用作USB的ID引脚,如果所使用的开发板使用了PA10作为USB OTG的ID引脚,那么在做本实验的时候开发板的USB OTG接口不能连接到电脑上!正点原子STM32MP157开发板的USB接口采用TypeC接口,因此没有用到PA10作为ID引脚。
打开STM32MP157的数据手册,可以看到PA10可以作为TIM1的通道3。
TIM1简介
这里其实可以去看裸机开发的笔记,对TIM1这个高级定时器的介绍,我这边只关注Linux驱动部分。
TIM1设备节点
接下来看一下TIM1的设备树,STM32定时器设备树绑定信息文档为:Documentation/devicetree/bindings/mfd/stm32-timers.txt,简单总结一下定时器节点信息。
1、必须的参数
- compatible:必须是“st,stm32-timers”。
- reg:定时器控制器物理寄存器基地址,对于TIM1来说,这个地址为0x44000000,这个可以在STM32MP157的数据手册上找到。
- clock-names:时钟源名字,设置为“int”。
- clocks:时钟源。
2、可选的参数
- resets:复位句柄,用来复位定时器控制器,可以参考文档reset/st,stm32-rcc.txt。
- dmas:DMA通道,最多7通道的DMA。
- dma-names:DMA名字列表,必须和“dmas”属性匹配,可选的名字有“ch1”、“ch2”、“ch3”、“ch4”、“up”、 “trig”、“com”。
3、可选的子节点
STM32定时器有多种功能,比如计时、PWM、计数器等,不同的功能需要用不同的子节点来表示,可选子节点有三种,分别对应不同的功能:
- pwm:pwm子节点描述定时器的PWM功能,关于PWM的详细信息请参考绑定文档pwm/pwm-stm32.txt。
- timer: timer子节点描述定时器的定时功能,定时相关信息请参考绑定文档iio/timer/stm32-timer-trigger.txt。
- counter: counter子节点描述定时器的计数功能,相关信息请参考绑定文档counter/stm32-timer-cnt.txt。
了解完定时器的绑定文档以后,来看一下STM32MP157实际的定时器节点,打开stm32mp151.dtsi,找到名为“timers1”的设备节点,这个就是TIM1定时器节点,内容如下:

第19-23行,TIM1的pwm功能子节点,这个是本小节重点关注的。
PWM设备子节点
通过上面对定时器绑定文档的讲解,知道PWM作为定时器的子节点,这里就来看一下PWM子节点绑定文档:Documentation/devicetree/bindings/pwm/pwm-stm32.txt,简单总结一下PWM子节点属性信息:
- compatible:必须为“st,stm32-pwm”。
- pinctrl-names:设置为“default”,也可以添加“sleep”,这样当进入低功耗的时候PWM引脚引入sleep模式。
- pinctrl-n:PWM引脚pinctrl句柄,用来指定PWM信号输出引脚。
- #pwm-cells:应该设置为3。
STM32MP157的PWM节点的compatible属性为“st,stm32-pwm”,可以在Linux内核源码中搜索这个字符串找到PWM驱动文件,这个文件为:drivers/pwm/pwm-stm32.c。
PWM子系统
Linux内核提供了PWM子系统框架,编写PWM驱动的时候一定要符合这个框架。PWM子系统的核心是pwm_chip结构体,定义在文件include/linux/pwm.h中,定义如下:

第292行,pwm_ops结构体就是PWM外设的各种操作函数集合,编写PWM外设驱动的时候需要开发人员实现。pwm_ops结构体也定义在pwm.h头文件中,定义如下:

pwm_ops中的这些函数不一定全部实现,但是配置PWM的函数必须实现,比如apply或者config。第264行的apply函数是最新的PWM配置函数,通过此函数来配置PWM的周期以及占空比,老的内核里面会使用第271行的config函数来配置PWM。其中第271-276行的config、set_polarity、enable和disable都是老版本内核所使用的函数。
PWM子系统驱动的核心初始化pwm_chip结构体,然后向内核注册初始化完成以后的pwm_chip。这里就要用到pwmchip_add函数,此函数定义在drivers/pwm/core.c文件中,函数原型如下:
int pwmchip_add(struct pwm_chip *chip)
函数参数和返回值含义如下:
- chip:要向内核注册的pwm_chip。
- 返回值:0,成功;负数,失败。
卸载PWM驱动的时候需要将前面注册的pwm_chip从内核移除掉,这里要用到
pwmchip_remove函数,函数原型如下:
int pwmchip_remove(struct pwm_chip *chip)
函数参数和返回值含义如下:
- chip:要移除的pwm_chip。
- 返回值:0,成功;负数,失败。
PWM驱动源码解析
简单分析一下Linux内核自带的STM32MP157 PWM驱动,驱动文件是pwm-stm32.c这个文件。打开这个文件,可以看到,这是一个标准的平台设备驱动文件,有如下所示:

第2行,当设备树PWM节点的compatible属性值为“st,stm32-pwm”的话就会匹配此驱动。
第14行,当设备树节点和驱动匹配以后stm32_pwm_probe函数就会执行。
在看stm32_pwm_probe函数之前先来看下stm32_pwm结构体,这个结构体是ST官方创建的STM32 PWM结构体,这个结构体会贯穿整个PWM驱动。stm32_pwm结构体定义在pwm-stm32.c文件中,结构体内容如下:

重点看一下第2行,这是一个pwm_chip结构体成员变量chip,前面说了PWM子系统的核心就是pwm_chip。
stm32_pwm_probe函数如下(有缩减):
示例代码39.1.3.3 stm32_pwm_probe函数
608 static int stm32_pwm_probe(struct platform_device *pdev)
609 {
610 struct device *dev = &pdev->dev;
611 struct device_node *np = dev->of_node;
612 struct stm32_timers *ddata = dev_get_drvdata(pdev->dev.parent);
613 struct stm32_pwm *priv;
614 int ret;
615
616 priv = devm_kzalloc(dev, sizeof(*priv), GFP_KERNEL);
617 if (!priv)
618 return -ENOMEM;
619
620 mutex_init(&priv->lock);
621 priv->regmap = ddata->regmap;
622 priv->clk = ddata->clk;
623 priv->max_arr = ddata->max_arr;
624 priv->chip.of_xlate = of_pwm_xlate_with_flags;
625 priv->chip.of_pwm_n_cells = 3;
626
627 if (!priv->regmap || !priv->clk)
628 return -EINVAL;
629
630 ret = stm32_pwm_probe_breakinputs(priv, np);
631 if (ret)
632 return ret;
633
634 stm32_pwm_detect_complementary(priv);
635
636 priv->chip.base = -1;
637 priv->chip.dev = dev;
638 priv->chip.ops = &stm32pwm_ops;
639 priv->chip.npwm = stm32_pwm_detect_channels(priv);
640
641 ret = pwmchip_add(&priv->chip);
642 if (ret < 0)
643 return ret;
644
645 platform_set_drvdata(pdev, priv);
646
647 return 0;
648
第616行,priv是一个stm32_pwm类型的结构体指针变量,这里为其申请内存。stm32_pwm结构体有个重要的成员变量chip,chip是pwm_chip类型的。所以这一行就引出了PWM子系统核心部件pwm_chip,稍后的重点就是初始化chip。
第621-625行,初始化priv的各个成员变量,第624和625还初始化了pwm_chip的of_xlate和of_pwm_n_cells这两个成员变量。
第630行,调用stm32_pwm_probe_breakinputs函数来读取“st,breakinput”属性,设置break输入,本章例程用不到。
第634行,调用stm32_pwm_detect_complementary函数来检测是否使能TIM1的互补输出功能。
第636-639行,重点,初始化pwm_chip的各个成员变量,第638行设置pwm_chip的ops函数为stm32pwm_ops,stm32pwm_ops里面包含了PWM的具体操作,稍后重点分析。第639行设置pwm_chip的npwm,也就是设置当前打开多少路PWM。这里直接使用stm32_pwm_detect_channels函数来读取TIM1的CCER寄存器,CCER寄存器的CC1E(bit0)、CC2E(bit4)、CC3E(bit8)和CC4E(bit12)这4个位用于开启TIM1的4通道PWM,如果为1就表示对应的PWM通道打开。所以stm32_pwm_detect_channels函数就会直接读取这4个位来判断对应的PWM通道是否打开。
重点来看一下stm32pwm_ops,定义如下:
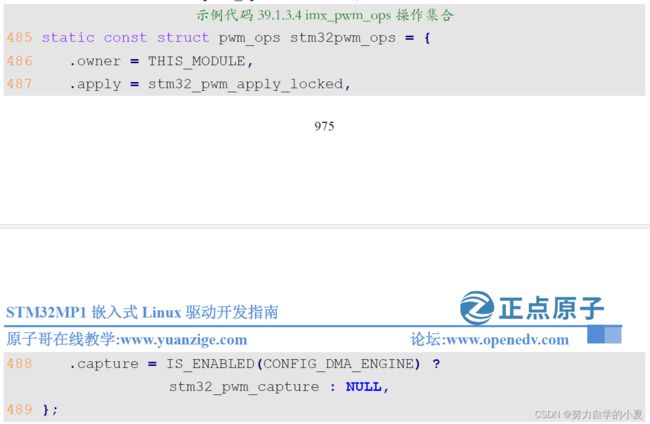
第487行stm32_pwm_apply_locked就是最终的PWM设置函数,在应用中设置的PWM频率和占空比最终就是由stm32_pwm_apply_locked函数来完成的,此函数会最终操作STM32相关的寄存器。
stm32_pwm_apply_locked函数源码如下:
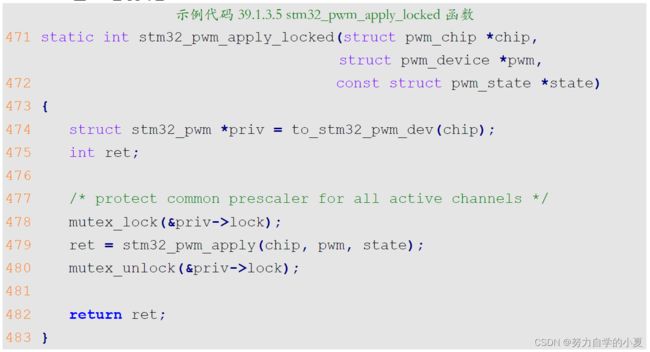
第478行,加互斥锁,防止竞争的产生。一次只有一个应用可以设置PWM。
第479行,调用stm32_pwm_apply函数来设置 PWM。
stm32_pwm_apply函数内容如下:
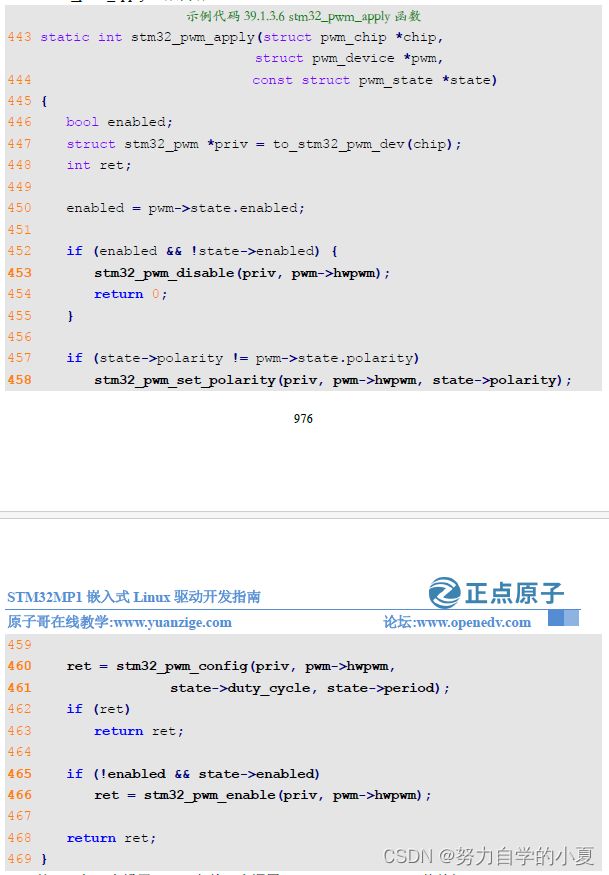
第453行,在设置PWM之前,先调用stm32_pwm_disable函数关闭PWM。
第458行,调用stm32_pwm_set_polarity函数设置指定PWM通道的极性。
第460行,调用stm32_pwm_config来设置PWM的频率以及占空比。
第465行,PWM设置完成以后调用stm32_pwm_enable函数使能PWM。
stm32_pwm_config函数内容如下:
示例代码39.1.3.7 stm32_pwm_config函数
322 static int stm32_pwm_config(struct stm32_pwm *priv, int ch,
323 int duty_ns, int period_ns)
324 {
325 unsigned long long prd, div, dty;
326 unsigned int prescaler = 0;
327 u32 ccmr, mask, shift;
328
329 /* Period and prescaler values depends on clock rate */
330 div = (unsigned long long)clk_get_rate(priv->clk) * period_ns;
331
332 do_div(div, NSEC_PER_SEC);
333 prd = div;
334
335 while (div > priv->max_arr) {
336 prescaler++;
337 div = prd;
338 do_div(div, prescaler + 1);
339 }
340
341 prd = div;
342
343 if (prescaler > MAX_TIM_PSC)
344 return -EINVAL;
345
346 /*
347 * All channels share the same prescaler and counter so when two
348 * channels are active at the same time we can't change them
349 */
350 if (active_channels(priv) & ~(1 << ch * 4)) {
351 u32 psc, arr;
352
353 regmap_read(priv->regmap, TIM_PSC, &psc);
354 regmap_read(priv->regmap, TIM_ARR, &arr);
355
356 if ((psc != prescaler) || (arr != prd - 1))
357 return -EBUSY;
358 }
359
360 regmap_write(priv->regmap, TIM_PSC, prescaler);
361 regmap_write(priv->regmap, TIM_ARR, prd - 1);
362 regmap_update_bits(priv->regmap, TIM_CR1, TIM_CR1_ARPE, TIM_CR1_ARPE);
363
364 /* Calculate the duty cycles */
365 dty = prd * duty_ns;
366 do_div(dty, period_ns);
367
368 write_ccrx(priv, ch, dty);
369
370 /* Configure output mode */
371 shift = (ch & 0x1) * CCMR_CHANNEL_SHIFT;
372 ccmr = (TIM_CCMR_PE | TIM_CCMR_M1) << shift;
373 mask = CCMR_CHANNEL_MASK << shift;
374
375 if (ch < 2)
376 regmap_update_bits(priv->regmap, TIM_CCMR1, mask, ccmr);
377 else
378 regmap_update_bits(priv->regmap, TIM_CCMR2, mask, ccmr);
379
380 regmap_update_bits(priv->regmap, TIM_BDTR, TIM_BDTR_MOE, TIM_BDTR_MOE);
381
382 return 0;
383 }
PWM的设置主要就是两方面:频率和占空比。第330~362行都是设置PWM频率的,函数参数period_ns为周期值,也就是PWM的频率。TIM的PSC寄存器用来设置定时器分频值,当TIM时钟源确定以后,设置PSC分频值即可得到TIM最终的时钟频率。TIM的ARR寄存器是自动加载寄存器,将TIM设置为向下计数器,定时器开启以后每个时钟周期,计数器减一,直到计数器减为0。这个时候再将ARR里面的值加载到计数器里面,计数器就会重新开始倒计时,如此一直重复。因此PSC和ARR这两个寄存器就决定了PWM的周期值。 要注意!由于一个定时器有4通道的 PWM,而这4路PWM只能设置成同一个周期,如果想要多路周期不同的PWM信号,那就要使用多个不同的TIM!
第365-380行,设置PWM的占空比,参数duty_ns表示占空比。一个定时器下的4路PWM可以设置不同的占空比,相当于一个定时器下的4路PWM信号,周期是一样的,但是占空比可以不同。占空比的设计原理比较简单,前面我们已经知道当定时器时钟频率确定以后(PSC分频值不变),ARR寄存器里面的值就决定了PWM周期,这个数值就叫比较值,改变比较值就可以改变PWM的占空比。STM32MP157一个定时器有4路PWM通道,每个通道都有个用来存放比较值的寄存器,因此一共有4个寄存器CCR1-CCR4,这4个寄存器就叫做比较寄存器。所以第365、366行就是根据参数duty_ns算出对应的CCRx(x=1~4)寄存器对应的值,然后在368行通过write_ccrx函数将相应的值写入到对应的
CCRx寄存器里面。
第371-378行是设置PWM输出模式,通道1和通道2使用CCMR1寄存器,通道3和通道4使用CCMR2寄存器。最后的380行设置BDTR寄存器,这个寄存器是break和死区控制相关的,本章用不到。
至此,STM32MP157的PWM驱动就分析完了。
PWM驱动编写
修改设备树
PWM驱动就不需要再编写了,ST已经写好了,前面也已经详细的分析过这个驱动源码了。在实际使用的时候只需要修改设备树即可(这个可以类比裸机开发用HAL库),STM32MP157开发板上的JP1排针引出了 PA10这个引脚,如下图所示:
PA10可以作为TIM1的通道3的PWM输出引脚,所以需要在设备树里面添加PA10的引脚信息以及TIM1通道3的PWM信息。
添加PA10引脚信息
打开stm32mp15-pinctrl.dtsi文件,在iomuxc节点下添加GPIO1_IO04的引脚信息,如下所示:
示例代码39.2.1.1 TIM1 PWM引脚信息
1 pwm1_pins_a: pwm1-0 {
2 pins {
3 pinmux = <STM32_PINMUX('E', 9, AF1)>, /* TIM1_CH1 */
4 <STM32_PINMUX('E', 11, AF1)>, /* TIM1_CH2 */
5 <STM32_PINMUX('E', 14, AF1)>; /* TIM1_CH4 */
6 bias-pull-down;
7 drive-push-pull;
8 slew-rate = <0>;
9 };
10 };
11
12 pwm1_sleep_pins_a: pwm1-sleep-0 {
13 pins {
14 pinmux = <STM32_PINMUX('E', 9, ANALOG)>, /* TIM1_CH1 */
15 <STM32_PINMUX('E', 11, ANALOG)>, /* TIM1_CH2 */
16 <STM32_PINMUX('E', 14, ANALOG)>; /* TIM1_CH4 */
17 };
18 };
可以看出ST官方已经设置好了TIM1的CH1、CH2和CH4这三个通道的引脚配置,但是这里只需要CH3,因此将示例代码29.2.1.1改成如下所示:
示例代码39.2.1.2 PA10引脚配置
1 pwm1_pins_a: pwm1-0 {
2 pins {
3 pinmux = <STM32_PINMUX('A', 10, AF1)>; /* TIM1_CH3 */
4 bias-pull-down;
5 drive-push-pull;
6 slew-rate = <0>;
7 };
8 };
9
10 pwm1_sleep_pins_a: pwm1-sleep-0 {
11 pins {
12 pinmux = <STM32_PINMUX('A', 10, ANALOG)>; /* TIM1_CH3 */
13 };
14 };
示例代码39.2.1.2中仅仅将PA10复用为TIM1的CH3,一定要根据自己所使用的板子硬件来配置引脚。
向timer1节点追加信息
stm32mp151.dtsi文件中已经有了“timers1”节点,但是这个节点默认是disable的,而且还不能直接使用。需要在stm32mp157d-atk.dts文件中向timers1节点追加一些内容,在stm32mp157d-atk.dts文件中加入如下所示内容:
示例代码39.2.1.3 向timers1添加的内容
1 &timers1 {
2 status = "okay";
3 /* spare all DMA channels since they are not needed for PWM output */
4 /delete-property/dmas;
5 /delete-property/dma-names;
6 pwm1: pwm {
7 pinctrl-0 = <&pwm1_pins_a>;
8 pinctrl-1 = <&pwm1_sleep_pins_a>;
9 pinctrl-names = "default", "sleep";
10 #pwm-cells = <2>;
11 status = "okay";
12 };
13 };
第 4、5行,关闭DMA功能,因为PWM输出不需要DMA。
第7行,pinctrl-0属性指定TIM1的CH3所使用的输出引脚对应的pinctrl节点,这里设置
为示例代码39.2.1.2中的pwm1_pins_a。
屏蔽其他复用的IO
检查一下设备树中有没有其他外设用到PA10,如果有的话需要屏蔽掉!注意,不能只屏蔽掉PA10的 pinctrl配置信息,也要搜索一下“gpioa 10”,看看有没有哪里用到,用到的话也要屏蔽掉。
设备树修改完成后重新编译设备树,然后使用新的设备树启动系统。
使能PWM驱动
ST官方的Linux内核已经默认使能了PWM驱动,所以不需要修改,但是为了学习,还是需要知道怎么使能。打开Linux内核配置界面,按照如下路径找到配置项:
| -> Device Drivers -> Pulse-Width Modulation (PWM) Support -> <*> STMicroelectronics STM32 PWM //选中 |
配置如下图所示:

PWM驱动测试
确定TIM1对应的pwmchipX问价
使用新的设备树启动系统,然后将开发板上的PA10引脚连接到示波器上,通过示波器来查看PWM波形图。可以直接在用户层来配置PWM,进入目录/sys/class/pwm中,如下图所示:

注意!上图中有个pwmchip0,但是并不知道这个pwmchip0是否为TIM1对应的文件。可以通过查看pwmchip0对应的地址是否和TIM1定时器寄存器起始地址是否一致来确定其是否属于TIM1。进入到pwmchip0目录下,会打印出其路径:
![]()
从上图可以看出pwmchip0对应的定时器寄存器起始地址为0X44000000,根据示例代码39.1.1.1中的timers1节点,可以知道TIM1这个定时器的寄存器起始地址就是0X44000000。因此,pwmchip0就是TIM1对应的文件。
为什么要用这么复杂的方式来确定定时器对应的pwmchip文件呢?因为当STM32MP157开启多个定时器的PWM功能以后,其pwmchip文件就会变!
调出pwmchip0的pwm2子目录
pwmchip0是整个TIM1的总目录,而TIM1有4路PWM,每路都可以独立打开或关闭。CH1-CH4对应的编号为0~3,因此打开TIM1的CH3输入如下命令:
| echo 2 > /sys/class/pwm/pwmchip0/export |
上述命令中2就是TIM1_CH3,如果要打开TIM1的CH1,那就是0。执行完成会在pwmchip0目录下生成一个名为“pwm2”的子目录,如下图所示:

设置PWM频率
注意,这里设置的是周期值,单位为ns,比如20KHz频率的周期就是50000ns,输入如下命令:
| echo 50000 > /sys/class/pwm/pwmchip0/pwm2/period |
设置PWM的占空比
这里不能直接设置占空比,而是设置的一个周期的ON时间,也就是高电平时间,比如20KHz频率下20%占空比的ON时间就是10000,输入如下命令:
| echo 10000 > /sys/class/pwm/pwmchip0/pwm2/duty_cycle |
使能TIM1 CH3
一定要先设置频率和波特率,最后在开启定时器,否则会提示参数错误!输入如下命令使能TIM1的通道3这路PWM:
| echo 1 > /sys/class/pwm/pwmchip0/pwm2/enable |
设置完成使用示波器查看波形是否正确,正确的话如下图所示:
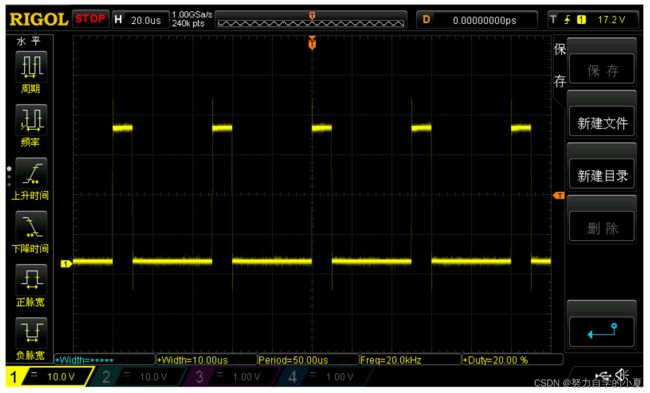
从上图可以看出,此时PWM频率为20KHz,占空比为20%,与设置的一致。如果要修改频率或者占空比的话一定要注意这两者时间值,比如20KHz频率的周期值为50000ns,那么在调整占空比的时候ON时间就不能设置大于50000,否则就会提示参数无效。
极性反转
前面也可以修改PWM的极性,上面设置的PWM占空比为20%,只需要修改极性就可以将占空比变为80%。向/pwmchip0/pwm2/polarity文件写入“inversed”即可反转极性,命令如下:
| echo "inversed" > /sys/class/pwm/pwmchip0/pwm2/polarity |
极性反转以后占空比就变为了80%,如果要恢复回原来的极性,向/pwmchip0/pwm2/polarity文件写入“normal”即可,命令如下:
| echo "normal" > /sys/class/pwm/pwmchip0/pwm2/polarity |
总结
Linux内核直接修改PWM,只需要在pinctrl和设备树中添加相应的内容即可。
在stm32mp15-pinctrl.dtsi中,在iomuxc节点下,找到本次实验中使用的TIM1的复用,就是pwm1_pins_a和pwm1_sleep_pins_a节点,添加电气属性内容。
在stm32mp157d-atk.dts中,向&timer1追加内容,把status置为“okay”使能,然后把pinctrl加入即可。
最后就可以通过在/sys/class/pwm里面对应的pwmchip文件中,在./export通过“echo”命令打开对应的PWM输出,在./period设置频率和在./duty_cycle设置占空比;最后在./enable中“echo 1”打开PWM输出。