AMBA低功耗接口(二)P_Channel
为了满足复杂的power管理的需求,arm提供了P_Channel的低功耗接口,来满足这样的应用场景。
一、P_Channel
P_Channel,提出了一个概念,叫power state transition,power状态的切换。在P_Channel的应用场景中,power的状态有很多,这个是实现自己定义的。power的各个状态之间,是可以切换的。
2个最基本的状态:
- lower-power状态:在这个状态下,power消耗比较少,device处于低功耗状态(具有部分功能)
- higher-power状态:在这个状态,power消耗比较大,device处于正常状态(具有完整功能)
1、接口
以下是P_Channel接口。
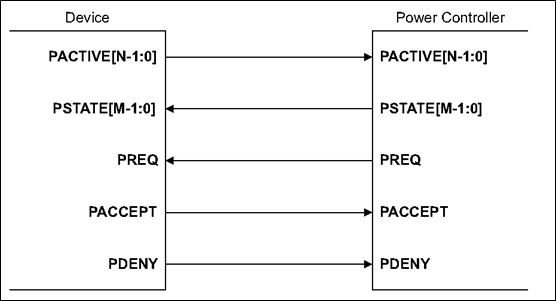
分为device端和power控制端(下文简称PMU)。
信号 |
说明 |
驱动端 |
PACTIVE [N-1:0] |
提供wakeup功能 |
device |
PSTATE [M-1:0] |
需要切换的目的power状态 |
PMU |
PREQ |
为高,表示power状态切换请求 |
PMU |
PACCEPT |
为高,表示device接受power状态切换请求 |
device |
PDENY |
为高,表示device拒绝power状态切换请求 |
device |
PACCEPT和PDENY在握手中,只能有一个为高。PACCEPT表示接受请求,PDENY表示拒绝请求。
PACCEPT,PDENY,PREQ,PSTATE,必须是从寄存器直接输出。
2、P_Channel接口握手状态
对P_Channel的接口,arm也定义了一些握手状态。不过状态,有加入了RESETn信号的影响。
- P_RESET: device处于reset状态
- P_STABLE: device处于非reset状态,并且PMU没有发送power状态切换请求
- P_REQUEST: PMU向device发送power状态切换请求
- P_ACCEPT: device接受PMU的power状态切换请求
- P_DENIED: device拒绝PMU的power状态切换请求
- P_COMPLETE: device接受PMU的power状态切换请求后,PMU取消power状态切换请求
- P_CONTINUE: device拒绝PMU的power状态切换请求后,PMU取消power状态切换请求
编码:

以下是状态转移图:

握手协议规则:
- PREQ只有在PACCEPT和PDENY都为低情况下,才可以从低变为高
-
PREQ要满足以下的任意条件,才可以从高变为低:
- PACCETP是高,PDENY为低
- PACCEPT为低,PDENY为高
-
PSTATE满足以下的任意条件,才可以变化:
- PREQ,PACCEPT,PDENY都为低
- PREQ和PDENY为高,PACCEPT为低
- PACCEPT只有在PREQ为高,并且PDENY为低,才可以从低变为高
- PACCETP只有在PREQ为低,并且PDENY为低,才可以从高变为低
- PDENY只有在PREQ为高,并且PACCEPT为低,才可以从低变为高
- PDENY只有在PREQ为低,并且PACCEPT为低,才可以从高变为低
3、P_Channel的握手协议
握手协议,涉及到PREQ,PSTATE,PACCEPT,PENDY这4个信号。
3.1、device接受power状态切换
下图是该时序图:

在T2时刻之前,P_Channel处于P_STATBLE状态。
T2时刻,PMU拉高PREQ,将PSTATE置为STATE B。向device发送power状态切换请求,请求将device切换到STATE B的power状态。P_Channel进入P_REQUEST状态。
T3时刻,device将PACCEPT拉高,表示接受PMU的power状态切换请求。P_Channel进入P_ACCEPT状态。
T4时刻,PMU接收device的PACCEPT响应,拉低PREQ,取消请求。P_Channel进入P_COMPLETE状态。
T5时刻,device将PACCEPT拉低,表示完成power状态切换。P_Channel进入P_STABLE状态。
3.2、device拒绝power状态切换
下图是时序图:
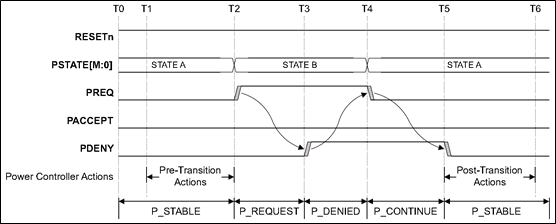
T2时刻以前,P_Channel处于P_STABLE状态。
T2时刻,PMU将PREQ拉高,将PSTATE置为STATE B。向device发送power状态切换请求,请求将device切换到STATE B的power状态。P_Channel进入P_REQUEST状态。
T3时刻,device将PDENY拉高,表示拒绝PMU的power切换请求。P_Channel进入P_DENIED状态。
T4时刻,PMU接收到device的PDENY响应,将PREQ拉低,取消请求,并且把PSTATE置为STATE A。P_Channel进入P_CONTINUE状态。
T5时刻,device将PDENY拉低,P_Channel进入P_STABLE状态。
4、device的复位和初始化
device在复位时,必须将PACCEPT和PDENY置为低,但对PACTIVE没有要求。
P_Channel的状态为P_STABLE时,device的复位信号,才可以设置为有效。
当device的复位无效时,device要进入初始化,此时PMU要设置PSTATE信号值,device会在复位之后,采样该信号值,从而采用合适的初始化流程。PSTATE要在复位信号无效后要保持稳定。
device,要提供一个初始化周期时间,tinit。用来表示,复位之后,PSTATE需要保持多久时间,供device初始化使用。PSTATE在tinit时间之内,必须要保持稳定。
以下是时序图:

T1时刻之前,RESETn为低,复位有效,P_Channel处于P_RESET状态。
T1时刻,RESETn为高,PMU将PSTATE置为STATE A。P_Channel进入P_STABLE状态。
T2时刻,由于tinit的限制,PMU要将PSTATE一直保持在STATE A,以便device正确的初始化。device必须要在tinit时间内,采样PSTATE。此后,PMU就可以发送power切换请求了。
T3时刻,PMU将PREQ置高,并且将PSTATE置为STATE B,发送power切换请求。P_Channel进入P_REQUEST状态。
T4时刻,device将PACCEPT拉高,表示接受PMU的power状态切换请求。P_Channel进入P_ACCEPT状态。
T5时刻,PMU接收device的PACCEPT响应,拉低PREQ,取消请求。P_Channel进入P_COMPLETE状态。
T6时刻,device将PACCEPT拉低,表示完成power状态切换。P_Channel进入P_STABLE状态。
T7时刻,P_Channel在P_STATBLE状态,可以进行复位,外部拉低RESETn,P_Channel进入P_RESET状态。
下图,展示了,当复位时,PMU发送power切换情况的时序图。

T1时刻,PMU将PREQ拉高,并置PSTATE为STATE A,但是复位信号有效,device不接收PMU请求。P_Channel保持为P_RESET状态。
T2时刻,复位信号释放,因为PREQ为高,P_Channel进入P_REQUEST状态。device接收PMU的power切换请求。
之后的就和上面的分析原理是一样的了。
下图,展示了,复位后,PMU发送使device进入STATE A的power状态请求,当该转换完成后,PMU又继续发送使device进入STATE B的power状态请求。

PMU在发送下一个power切换请求前,必须保证上一个power切换请求,传输完毕。
5、多个power状态切换
利用P_Channel,PMU可以使device,来回切换不同的power状态。

在T0,device处于STATE A状态。
在T1到T4,通过P_Channel,使device进入STATE B状态。在T4,P_Channel进入P_STABLE状态。
在T5-T8,通过P_Channel,使device进入STATE C状态。在T8,P_Channel进入P_STABLE状态。
6、PACTIVE
PACTIVE,提供给device给PMU发送请求。PACTIVE的每一个bit,表示一种请求。bit为高,表示device发送请求给PMU,让PMU处理,bit为低,表示device没有发送请求给PMU处理。
PACTIVE和握手协议,是独立开的。PACTIVE是设计自定义的,请求完全自己定义。当然,也可以不使用PACTIVE,如果不是用PACTIVE,需要将PACTIVE置为0。
以下是PACTIVE的例子:

PACTIVE有3个bit,每个bit,映射到一个power状态,MSB具有高优先级。
- PACTIVE[2]: STATE C
- PACTIVE[1]: STATE B
- PACTIVE[0]: STATE A
T1时刻,device将PACTIVE设置为3'b011,表示device向PMU发送power切换请求,将自己切换为STATE B。
PMU接收到device的请求后,从T2到T5,向device发送power切换请求,并且切换到STATE B状态。最后P_Channel进入P_STABLE状态。
T6时刻,device将PACTIVE设置为3'b111,表示device向PMU发送power切换请求,将自己切换为STATE C。
PMU接收到device的请求后,从T7到T10,向device发送power切换请求,并且切换到STATE C状态。最后P_Channel进入P_STABLE状态。
7、对于device,需要提供的信息
为了PMU的设计的正确性,device需要向PMU提供以下的一些信息:
-
device支持的power状态,包括以下:
- PSTATE定义和编码
- PACTIVE每个bit代表的请求
- 用于初始化power状态,推荐的PACTIVE输出
- PACTIVE需要被忽略,或者一直置0的bit信息
-
power状态的切换,包括以下:
- power状态切换之后的device行为
- device拒绝power状态切换的条件
- 复位释放后,用于初始化device的PSTATE的合理值
- tinit值
8、实现
对于device和PMU来说,有各自的时钟,因此他们的时钟,是当成异步来进行处理的,所以需要同步化的操作。
下图展示了,P_Channel的实现框图:
对于PSTATE,PREQ,PACCETP,PDENY,需要从寄存器直接输出,在接收端,需要使用同步器,对异步输入信号进行同步化输出。
对于PACTIVE,如果是多个来源的组合,ARM建议使用或门来实现。并且每个对PACTIVE贡献的来源,必须是寄存器直接输出。

9、P_Channel使用例子
以下是P_Channel使用的2个例子。
9.1、独立的power domain使用P_Channel
device0处于power domain0,PMU使用PD0来控制。
device1处于power domain1和power domain2,PMU使用PD1和PD2来分别控制。

9.2、父子关系的power domain使用P_Channel
device1内部有3个power domain,分别为power domain0,power domain1,power domain2,但是domain0是domain1和domain2的父domain,也就是domain0控制domain1和domain2。
PMU和device1有3个P_Channel接口,但是都是在power domain0中。
