集显就不配加速?ubuntu下使用openvino调用intel cpu对yolo5进行自定义模型的推理加速
环境:python3.8,ubuntu18.04,intel core i5,
进行加速之前请确保yolov5已经部署完成,并且已经得到训练好的.pt模型文件
yolov5部署参考:【Yolov5】1.认真总结6000字Yolov5保姆级教程(2022.06.28全新版本v6.1)_yolov5教程_若oo尘的博客-CSDN博客
1、安装onnx、openvino
pip install onnx==1.12.0pip install openvino-dev[onnx]pip install openvino2、进入yolo5目录,运行export.py将.pt文件转化为.onnx文件
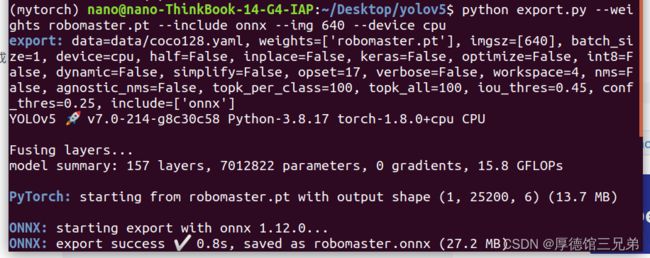
python export.py --weights robomaster.pt --include onnx --img 640 --device cpu
注意这里要将robomaster.pt替换成自己的模型文件。
因为这里我们使用因特尔的cpu加速,所以device选择cpu
没有问题的话出现以下提示:
并且yolo5目录下出现.onnx文件:
可能的报错:ONNX: export failure: Unsupported ONNX opset version: 13
解决方法:打开export.py,找到torch.onnx.export那一行:

将opset_version=opset中的第二个opset改成12:

3、将.onnx文件转化为IR模型
这里要访问一个网站:Netron 或者直接百度搜索Netron

点击open folder并选择自己的.onnx文件,然后点击open
之后网页会弹出模型的结构图。拖拽图片到最下方:
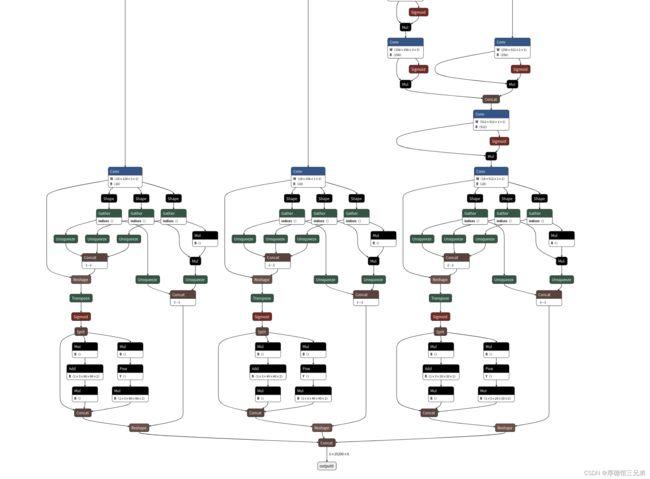
注意最后的三个Conv(卷积层)。分别点击查看并且记住它们的名字
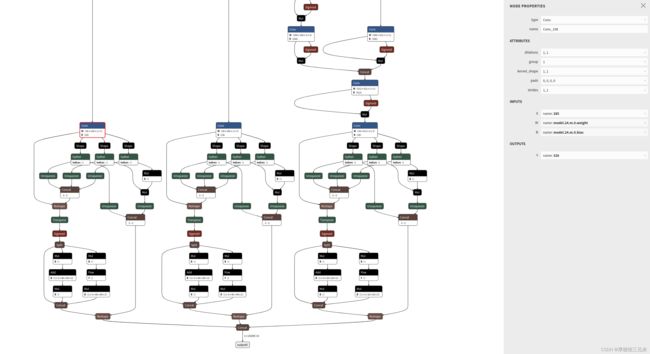
如上图,第一个卷积层的名称为Conv_198(只举第一个为例子,后面两个的名称也要看)
然后开始转化:
mo --input_model robomaster.onnx --model_name openvino_robomaster -s 255 --reverse_input_channels --output Conv_198,Conv_236,Conv_274记得将--input_model以及后面的--output(刚才三个名称)换成自己的。--model_name可以自己定义。
成功后出现以下提示:
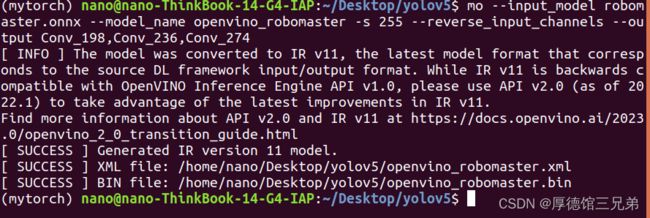
并且我们得到了xml文件和bin文件。
4、使用摄像头进行推理。
推理代码我是从github上面找的:
#!/usr/bin/env python
"""
Copyright (C) 2018-2019 Intel Corporation
Licensed under the Apache License, Version 2.0 (the "License");
you may not use this file except in compliance with the License.
You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software
distributed under the License is distributed on an "AS IS" BASIS,
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
See the License for the specific language governing permissions and
limitations under the License.
"""
from __future__ import print_function, division
import logging
import os
import sys
from argparse import ArgumentParser, SUPPRESS
from math import exp as exp
from time import time
import numpy as np
import cv2
from openvino.inference_engine import IENetwork, IECore
logging.basicConfig(format="[ %(levelname)s ] %(message)s", level=logging.INFO, stream=sys.stdout)
log = logging.getLogger()
def build_argparser():
parser = ArgumentParser(add_help=False)
args = parser.add_argument_group('Options')
args.add_argument('-h', '--help', action='help', default=SUPPRESS, help='Show this help message and exit.')
args.add_argument("-m", "--model", help="Required. Path to an .xml file with a trained model.",
required=True, type=str)
args.add_argument("-i", "--input", help="Required. Path to an image/video file. (Specify 'cam' to work with "
"camera)", required=True, type=str)
args.add_argument("-l", "--cpu_extension",
help="Optional. Required for CPU custom layers. Absolute path to a shared library with "
"the kernels implementations.", type=str, default=None)
args.add_argument("-d", "--device",
help="Optional. Specify the target device to infer on; CPU, GPU, FPGA, HDDL or MYRIAD is"
" acceptable. The sample will look for a suitable plugin for device specified. "
"Default value is CPU", default="CPU", type=str)
args.add_argument("--labels", help="Optional. Labels mapping file", default=None, type=str)
args.add_argument("-t", "--prob_threshold", help="Optional. Probability threshold for detections filtering",
default=0.5, type=float)
args.add_argument("-iout", "--iou_threshold", help="Optional. Intersection over union threshold for overlapping "
"detections filtering", default=0.4, type=float)
args.add_argument("-ni", "--number_iter", help="Optional. Number of inference iterations", default=1, type=int)
args.add_argument("-pc", "--perf_counts", help="Optional. Report performance counters", default=False,
action="store_true")
args.add_argument("-r", "--raw_output_message", help="Optional. Output inference results raw values showing",
default=False, action="store_true")
args.add_argument("--no_show", help="Optional. Don't show output", action='store_true')
return parser
class YoloParams:
# ------------------------------------------- Extracting layer parameters ------------------------------------------
# Magic numbers are copied from yolo samples
def __init__(self, side):
self.num = 3 #if 'num' not in param else int(param['num'])
self.coords = 4 #if 'coords' not in param else int(param['coords'])
self.classes = 80 #if 'classes' not in param else int(param['classes'])
self.side = side
self.anchors = [10.0, 13.0, 16.0, 30.0, 33.0, 23.0, 30.0, 61.0, 62.0, 45.0, 59.0, 119.0, 116.0, 90.0, 156.0,
198.0,
373.0, 326.0] #if 'anchors' not in param else [float(a) for a in param['anchors'].split(',')]
#self.isYoloV3 = False
#if param.get('mask'):
# mask = [int(idx) for idx in param['mask'].split(',')]
# self.num = len(mask)
# maskedAnchors = []
# for idx in mask:
# maskedAnchors += [self.anchors[idx * 2], self.anchors[idx * 2 + 1]]
# self.anchors = maskedAnchors
# self.isYoloV3 = True # Weak way to determine but the only one.
def log_params(self):
params_to_print = {'classes': self.classes, 'num': self.num, 'coords': self.coords, 'anchors': self.anchors}
[log.info(" {:8}: {}".format(param_name, param)) for param_name, param in params_to_print.items()]
def letterbox(img, size=(640, 640), color=(114, 114, 114), auto=True, scaleFill=False, scaleup=True):
# Resize image to a 32-pixel-multiple rectangle https://github.com/ultralytics/yolov3/issues/232
shape = img.shape[:2] # current shape [height, width]
w, h = size
# Scale ratio (new / old)
r = min(h / shape[0], w / shape[1])
if not scaleup: # only scale down, do not scale up (for better test mAP)
r = min(r, 1.0)
# Compute padding
ratio = r, r # width, height ratios
new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
dw, dh = w - new_unpad[0], h - new_unpad[1] # wh padding
if auto: # minimum rectangle
dw, dh = np.mod(dw, 64), np.mod(dh, 64) # wh padding
elif scaleFill: # stretch
dw, dh = 0.0, 0.0
new_unpad = (w, h)
ratio = w / shape[1], h / shape[0] # width, height ratios
dw /= 2 # divide padding into 2 sides
dh /= 2
if shape[::-1] != new_unpad: # resize
img = cv2.resize(img, new_unpad, interpolation=cv2.INTER_LINEAR)
top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
img = cv2.copyMakeBorder(img, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
top2, bottom2, left2, right2 = 0, 0, 0, 0
if img.shape[0] != h:
top2 = (h - img.shape[0])//2
bottom2 = top2
img = cv2.copyMakeBorder(img, top2, bottom2, left2, right2, cv2.BORDER_CONSTANT, value=color) # add border
elif img.shape[1] != w:
left2 = (w - img.shape[1])//2
right2 = left2
img = cv2.copyMakeBorder(img, top2, bottom2, left2, right2, cv2.BORDER_CONSTANT, value=color) # add border
return img
def scale_bbox(x, y, height, width, class_id, confidence, im_h, im_w, resized_im_h=640, resized_im_w=640):
gain = min(resized_im_w / im_w, resized_im_h / im_h) # gain = old / new
pad = (resized_im_w - im_w * gain) / 2, (resized_im_h - im_h * gain) / 2 # wh padding
x = int((x - pad[0])/gain)
y = int((y - pad[1])/gain)
w = int(width/gain)
h = int(height/gain)
xmin = max(0, int(x - w / 2))
ymin = max(0, int(y - h / 2))
xmax = min(im_w, int(xmin + w))
ymax = min(im_h, int(ymin + h))
# Method item() used here to convert NumPy types to native types for compatibility with functions, which don't
# support Numpy types (e.g., cv2.rectangle doesn't support int64 in color parameter)
return dict(xmin=xmin, xmax=xmax, ymin=ymin, ymax=ymax, class_id=class_id.item(), confidence=confidence.item())
def entry_index(side, coord, classes, location, entry):
side_power_2 = side ** 2
n = location // side_power_2
loc = location % side_power_2
return int(side_power_2 * (n * (coord + classes + 1) + entry) + loc)
def parse_yolo_region(blob, resized_image_shape, original_im_shape, params, threshold):
# ------------------------------------------ Validating output parameters ------------------------------------------
out_blob_n, out_blob_c, out_blob_h, out_blob_w = blob.shape
predictions = 1.0/(1.0+np.exp(-blob))
assert out_blob_w == out_blob_h, "Invalid size of output blob. It sould be in NCHW layout and height should " \
"be equal to width. Current height = {}, current width = {}" \
"".format(out_blob_h, out_blob_w)
# ------------------------------------------ Extracting layer parameters -------------------------------------------
orig_im_h, orig_im_w = original_im_shape
resized_image_h, resized_image_w = resized_image_shape
objects = list()
side_square = params.side * params.side
# ------------------------------------------- Parsing YOLO Region output -------------------------------------------
bbox_size = int(out_blob_c/params.num) #4+1+num_classes
for row, col, n in np.ndindex(params.side, params.side, params.num):
bbox = predictions[0, n*bbox_size:(n+1)*bbox_size, row, col]
x, y, width, height, object_probability = bbox[:5]
class_probabilities = bbox[5:]
if object_probability < threshold:
continue
x = (2*x - 0.5 + col)*(resized_image_w/out_blob_w)
y = (2*y - 0.5 + row)*(resized_image_h/out_blob_h)
if int(resized_image_w/out_blob_w) == 8 & int(resized_image_h/out_blob_h) == 8: #80x80,
idx = 0
elif int(resized_image_w/out_blob_w) == 16 & int(resized_image_h/out_blob_h) == 16: #40x40
idx = 1
elif int(resized_image_w/out_blob_w) == 32 & int(resized_image_h/out_blob_h) == 32: # 20x20
idx = 2
width = (2*width)**2* params.anchors[idx * 6 + 2 * n]
height = (2*height)**2 * params.anchors[idx * 6 + 2 * n + 1]
class_id = np.argmax(class_probabilities)
confidence = object_probability
objects.append(scale_bbox(x=x, y=y, height=height, width=width, class_id=class_id, confidence=confidence,
im_h=orig_im_h, im_w=orig_im_w, resized_im_h=resized_image_h, resized_im_w=resized_image_w))
return objects
def intersection_over_union(box_1, box_2):
width_of_overlap_area = min(box_1['xmax'], box_2['xmax']) - max(box_1['xmin'], box_2['xmin'])
height_of_overlap_area = min(box_1['ymax'], box_2['ymax']) - max(box_1['ymin'], box_2['ymin'])
if width_of_overlap_area < 0 or height_of_overlap_area < 0:
area_of_overlap = 0
else:
area_of_overlap = width_of_overlap_area * height_of_overlap_area
box_1_area = (box_1['ymax'] - box_1['ymin']) * (box_1['xmax'] - box_1['xmin'])
box_2_area = (box_2['ymax'] - box_2['ymin']) * (box_2['xmax'] - box_2['xmin'])
area_of_union = box_1_area + box_2_area - area_of_overlap
if area_of_union == 0:
return 0
return area_of_overlap / area_of_union
def main():
args = build_argparser().parse_args()
# ------------- 1. Plugin initialization for specified device and load extensions library if specified -------------
log.info("Creating Inference Engine...")
ie = IECore()
if args.cpu_extension and 'CPU' in args.device:
ie.add_extension(args.cpu_extension, "CPU")
# -------------------- 2. Reading the IR generated by the Model Optimizer (.xml and .bin files) --------------------
model = args.model
log.info(f"Loading network:\n\t{model}")
net = ie.read_network(model=model)
# ---------------------------------- 3. Load CPU extension for support specific layer ------------------------------
# if "CPU" in args.device:
# supported_layers = ie.query_network(net, "CPU")
# not_supported_layers = [l for l in net.layers.keys() if l not in supported_layers]
# if len(not_supported_layers) != 0:
# log.error("Following layers are not supported by the plugin for specified device {}:\n {}".
# format(args.device, ', '.join(not_supported_layers)))
# log.error("Please try to specify cpu extensions library path in sample's command line parameters using -l "
# "or --cpu_extension command line argument")
# sys.exit(1)
assert len(net.input_info.keys()) == 1, "Sample supports only YOLO V3 based single input topologies"
# ---------------------------------------------- 4. Preparing inputs -----------------------------------------------
log.info("Preparing inputs")
input_blob = next(iter(net.input_info))
# Defaulf batch_size is 1
net.batch_size = 1
# Read and pre-process input images
n, c, h, w = net.input_info[input_blob].input_data.shape
if args.labels:
with open(args.labels, 'r') as f:
labels_map = [x.strip() for x in f]
else:
labels_map = None
input_stream = 0 if args.input == "cam" else args.input
is_async_mode = True
cap = cv2.VideoCapture(input_stream)
number_input_frames = int(cap.get(cv2.CAP_PROP_FRAME_COUNT))
number_input_frames = 1 if number_input_frames != -1 and number_input_frames < 0 else number_input_frames
wait_key_code = 1
# Number of frames in picture is 1 and this will be read in cycle. Sync mode is default value for this case
if number_input_frames != 1:
ret, frame = cap.read()
else:
is_async_mode = False
wait_key_code = 0
# ----------------------------------------- 5. Loading model to the plugin -----------------------------------------
log.info("Loading model to the plugin")
exec_net = ie.load_network(network=net, num_requests=2, device_name=args.device)
cur_request_id = 0
next_request_id = 1
render_time = 0
parsing_time = 0
# ----------------------------------------------- 6. Doing inference -----------------------------------------------
log.info("Starting inference...")
print("To close the application, press 'CTRL+C' here or switch to the output window and press ESC key")
print("To switch between sync/async modes, press TAB key in the output window")
while cap.isOpened():
# Here is the first asynchronous point: in the Async mode, we capture frame to populate the NEXT infer request
# in the regular mode, we capture frame to the CURRENT infer request
if is_async_mode:
ret, next_frame = cap.read()
else:
ret, frame = cap.read()
if not ret:
break
if is_async_mode:
request_id = next_request_id
in_frame = letterbox(frame, (w, h))
else:
request_id = cur_request_id
in_frame = letterbox(frame, (w, h))
in_frame0 = in_frame
# resize input_frame to network size
in_frame = in_frame.transpose((2, 0, 1)) # Change data layout from HWC to CHW
in_frame = in_frame.reshape((n, c, h, w))
# Start inference
start_time = time()
exec_net.start_async(request_id=request_id, inputs={input_blob: in_frame})
det_time = time() - start_time
# Collecting object detection results
objects = list()
if exec_net.requests[cur_request_id].wait(-1) == 0:
output = exec_net.requests[cur_request_id].output_blobs
start_time = time()
for layer_name, out_blob in output.items():
layer_params = YoloParams(side=out_blob.buffer.shape[2])
log.info("Layer {} parameters: ".format(layer_name))
layer_params.log_params()
objects += parse_yolo_region(out_blob.buffer, in_frame.shape[2:],
#in_frame.shape[2:], layer_params,
frame.shape[:-1], layer_params,
args.prob_threshold)
parsing_time = time() - start_time
# Filtering overlapping boxes with respect to the --iou_threshold CLI parameter
objects = sorted(objects, key=lambda obj : obj['confidence'], reverse=True)
for i in range(len(objects)):
if objects[i]['confidence'] == 0:
continue
for j in range(i + 1, len(objects)):
if intersection_over_union(objects[i], objects[j]) > args.iou_threshold:
objects[j]['confidence'] = 0
# Drawing objects with respect to the --prob_threshold CLI parameter
objects = [obj for obj in objects if obj['confidence'] >= args.prob_threshold]
if len(objects) and args.raw_output_message:
log.info("\nDetected boxes for batch {}:".format(1))
log.info(" Class ID | Confidence | XMIN | YMIN | XMAX | YMAX | COLOR ")
origin_im_size = frame.shape[:-1]
print(origin_im_size)
for obj in objects:
# Validation bbox of detected object
if obj['xmax'] > origin_im_size[1] or obj['ymax'] > origin_im_size[0] or obj['xmin'] < 0 or obj['ymin'] < 0:
continue
color = (int(min(obj['class_id'] * 12.5, 255)),
min(obj['class_id'] * 7, 255), min(obj['class_id'] * 5, 255))
det_label = labels_map[obj['class_id']] if labels_map and len(labels_map) >= obj['class_id'] else \
str(obj['class_id'])
if args.raw_output_message:
log.info(
"{:^9} | {:10f} | {:4} | {:4} | {:4} | {:4} | {} ".format(det_label, obj['confidence'], obj['xmin'],
obj['ymin'], obj['xmax'], obj['ymax'],
color))
cv2.rectangle(frame, (obj['xmin'], obj['ymin']), (obj['xmax'], obj['ymax']), color, 2)
cv2.putText(frame,
"#" + det_label + ' ' + str(round(obj['confidence'] * 100, 1)) + ' %',
(obj['xmin'], obj['ymin'] - 7), cv2.FONT_HERSHEY_COMPLEX, 0.6, color, 1)
# Draw performance stats over frame
inf_time_message = "Inference time: N\A for async mode" if is_async_mode else \
"Inference time: {:.3f} ms".format(det_time * 1e3)
render_time_message = "OpenCV rendering time: {:.3f} ms".format(render_time * 1e3)
async_mode_message = "Async mode is on. Processing request {}".format(cur_request_id) if is_async_mode else \
"Async mode is off. Processing request {}".format(cur_request_id)
parsing_message = "YOLO parsing time is {:.3f} ms".format(parsing_time * 1e3)
cv2.putText(frame, inf_time_message, (15, 15), cv2.FONT_HERSHEY_COMPLEX, 0.5, (200, 10, 10), 1)
cv2.putText(frame, render_time_message, (15, 45), cv2.FONT_HERSHEY_COMPLEX, 0.5, (10, 10, 200), 1)
cv2.putText(frame, async_mode_message, (10, int(origin_im_size[0] - 20)), cv2.FONT_HERSHEY_COMPLEX, 0.5,
(10, 10, 200), 1)
cv2.putText(frame, parsing_message, (15, 30), cv2.FONT_HERSHEY_COMPLEX, 0.5, (10, 10, 200), 1)
start_time = time()
if not args.no_show:
cv2.imshow("DetectionResults", frame)
render_time = time() - start_time
if is_async_mode:
cur_request_id, next_request_id = next_request_id, cur_request_id
frame = next_frame
if not args.no_show:
key = cv2.waitKey(wait_key_code)
# ESC key
if key == 27:
break
# Tab key
if key == 9:
exec_net.requests[cur_request_id].wait()
is_async_mode = not is_async_mode
log.info("Switched to {} mode".format("async" if is_async_mode else "sync"))
cv2.destroyAllWindows()
if __name__ == '__main__':
sys.exit(main() or 0)运行以下命令来执行代码:(本代码我命名为yolov5_demo_OV2021.3.py)
python3 yolov5_demo_OV2021.3.py -i cam -m openvino_robomaster.xml
我这里没有显示标签。有需要的可以在命令末尾加入 --labels my_labels.txt
标签格式:
person
hat
mask
hand
记得标签文件放在yolo5目录下。
之后开始推理了,加速成功!

效果视频:【【视觉-杨老二】使用openvino对yolov5进行加速的装甲板识别-哔哩哔哩】 https://b23.tv/E6062m7