C++求欧拉角(eigen库中暴露的一些问题)
不同顺序欧拉角转旋转矩阵对照公式
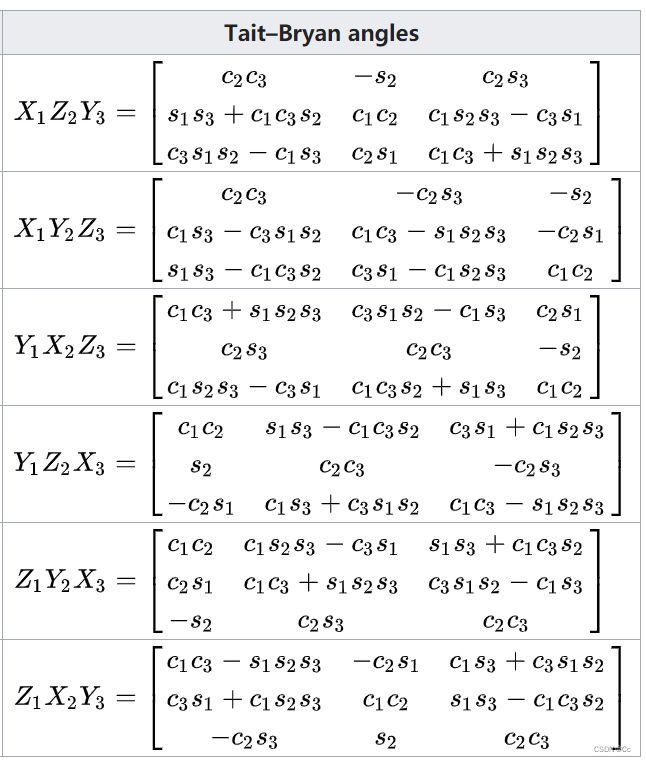
eigen库求欧拉角公式
分别试验eigen库自带的matrix.eulerAngles()函数,与根据上述公式推导的两种方法求欧拉角
eigen库求得欧拉角的范围一定是 x − > r o l l x->roll x−>roll方向在 [ 0 , π ] [0,π] [0,π]之间, y − > p i t c h y->pitch y−>pitch方向在 [ − π , π ] [-π,π] [−π,π]之间, z − > y a w z->yaw z−>yaw方向在 [ − π , π ] [-π,π] [−π,π]之间,优先会保证 x − > r o l l x->roll x−>roll方向处于 [ 0 , π ] [0,π] [0,π]之间,才回去算别的角度。
以下代码验证:
#include 输出的结果为
-0.708i + 0.05j + 0.002k + 0.704//四元数
0.994992 -0.073616 0.067568
-0.067984 -0.002536 0.997064
-0.073232 -0.996664 -0.007528//旋转矩阵
-0.70756i + 0.049969j + 0.00199876k + 0.704437//四元数
XYZ------------//先转x
1.56325//x roll
3.07397//y pitch
-3.06774//z yaw
ZYX------------//先转z
3.07337// z yaw
3.06825//y pitch
1.56324//x roll
可以看到以上两种旋转顺序情况下用eigen库自带的matrix.eulerAngles()函数会使得z yaw,y pitch方向上计算的欧拉角数值增大,不利于机器人做角度控制,原本机器人可能朝反方向转很小的一个角度,可能现在需要转很大一圈。
用公式推导编写的代码:
//接着上面代码段补充运行即可
double sy=sqrt(m(0,0) * m(0,0) + m(0,1) * m(0,1));
if (sy>0.00001)//判断万向锁奇异
{
v2(0) = std::atan2(-m(1, 2), m(2, 2));
v2(1) = std::atan2(m(0, 2), sy);
v2(2) = std::atan2(-m(0, 1), m(0, 0));
}
else//奇异
{
v2(0) = 0;
v2(1) = std::atan2(m(0, 2), sy);
v2(2) = std::atan2(-m(1, 0), m(2, 0));
}
cout << "XYZ------------" << endl;
cout << v2 << endl;
if (sy>0.00001)//判断万向锁奇异
{
v2(0) = std::atan2(m(2, 1), m(2, 2));
v2(1) = std::atan2(m(2, 0), sy);
v2(2) = std::atan2(-m(1, 0), m(0, 0));
}
else//奇异
{
v2(0) = std::atan2(-m(1, 2), m(1, 1));;
v2(1) = std::atan2(m(2, 0), sy);
v2(2) = 0;
}
cout << "ZYX------------" << endl;
cout << v2 << endl;
输出结果:
XYZ------------
-1.57835//x
0.0676197//y
0.073852//z
ZYX------------
-1.57835 //注意这里还是x,与`eigen`库自带的`matrix.eulerAngles()`出来的顺序不一样
-0.0732686
0.0682201//注意这里还是z
这里角度明显小很多,两种不同的方法的结果可以通过加减π得到,但是XYZ、ZYX两种不同顺序下的结果还不一样
因此建议直接用公式推导出来的方法。
参考:
https://zhuanlan.zhihu.com/p/85108850
https://blog.csdn.net/u011906844/article/details/121863578
https://blog.csdn.net/zhuoqingjoking97298/article/details/122259409
https://blog.csdn.net/WillWinston/article/details/125746107