STM32MP157驱动开发——Linux RS232/485/GPS 驱动
STM32MP157驱动开发——Linux RS232/485/GPS 驱动
- 一、简介
- 二、STM32MP1 UART 驱动分析
-
- 1.UART 的 platform 驱动框架
- 2.uart_driver相关流程
- 三、驱动开发
-
- 1.RS232驱动编写
-
- 1)添加 usart3 和 uart5 的引脚信息
- 2)移植minicom
- 四、驱动测试
-
- 1.RS232收发测试
- 2.RS485测试
- 3.GPS测试
参考文章:【正点原子】I.MX6U嵌入式Linux驱动开发——Linux RS232/485/GPS驱动
一、简介
除了 platform、I2C、SPI 之外,还可以通过串口 uart 与其他设备或传感器进行通信。根据电平的不同,串口分为 TTL 和 RS232,但是不管是什么样的接口电平,其驱动程序都是一样的,通过外接 RS485 这样的芯片就可以将串口转换为 RS485 信号。
正点原子的 STM32MP1 开发板有 8 个串口,四个同步串口(USART1、USART2、USART3 和 USART6),四个异步串口(UART4、UART5、UART7 和 UART8)。RS232 和 RS485 接口连接到了 STM32MP1 的 USART3 接口上,通过跳线帽选择相应的功能。GPS 模块连接到 UART5 接口上,因此这些外设最终都归结为 USART3 和 UART5 的串口驱动。
同 I2C、SPI 一样,Linux 也提供了串口驱动框架,只需要按照相应的串口框架编写驱动程序即可。串口驱动没有主机端和设备端之分,就只有一个串口驱动,而且这个驱动也已经由 ST 官方编写好,开发人员要做的就是在设备树中添加所要使用的串口节点信息。当系统启动以后串口驱动和设备匹配成功,相应的串口就会被驱动起来,生成 /dev/ttySTMX(X=0….n)文件。
二、STM32MP1 UART 驱动分析
1.UART 的 platform 驱动框架
在设备树 stm32mp151.dtsi 文件中,有 USART3 对应的子节点:
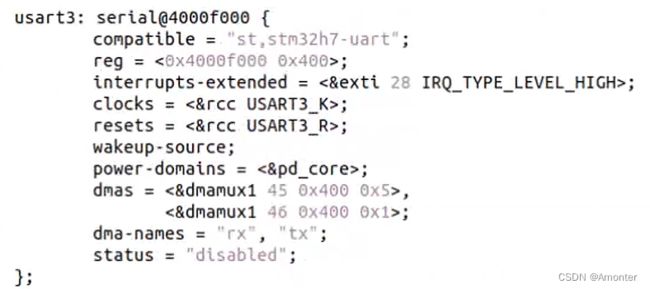
根据compatible属性值可以找到驱动文件为drivers/tty/serial/stm32-usart.c。查看相应文件可以发现 UART 本质上是一个 platform 驱动。
2.uart_driver相关流程
初始化:
1550 static struct uart_driver stm32_usart_driver = {
1551 .driver_name = DRIVER_NAME,
1552 .dev_name = STM32_SERIAL_NAME,
1553 .major = 0,
1554 .minor = 0,
1555 .nr = STM32_MAX_PORTS,
1556 .cons = STM32_SERIAL_CONSOLE,
1557 };
probe函数:
1306 static int stm32_usart_serial_probe(struct platform_device *pdev)
1307 {
1308 const struct of_device_id *match;
1309 struct stm32_port *stm32port;
1310 int ret;
1311
1312 stm32port = stm32_usart_of_get_port(pdev);
1313 if (!stm32port)
1314 return -ENODEV;
1315
1316 match = of_match_device(stm32_match, &pdev->dev);
1317 if (match && match->data)
1318 stm32port->info = (struct stm32_usart_info *)match->data;
1319 else
1320 return -EINVAL;
1321
1322 ret = stm32_usart_init_port(stm32port, pdev);
1323 if (ret)
1324 return ret;
......
1374 ret = uart_add_one_port(&stm32_usart_driver, &stm32port->port);
1375 if (ret)
1376 goto err_port;
1377
1378 pm_runtime_put_sync(&pdev->dev);
1379
1380 return 0;
.....
1410 }
三、驱动开发
本节要用到 STM32MP1 的 USART3 接口和 UART5 接口,USART3 连接 RS485 和RS232 的公头,UART5 连接 GPS 和 RS232 的母头。
RS232原理图:

RS232 串口一共有 2 个,COM1 是母头,COM2为公头,这两个 RS232 串口都是通过 SP3232 芯片来实现。
COM1 母头连接到 STM32MP1 的 UART5 接口上,和正点原子的 ATK 模块共用 USART5,把 JP5 的 1-3 和 2-4 连接起来以后 SP3232 就和 URAT5 连接到一起。UART5_TX 和 UART5_RX 分别接到了 PB13 和 PB12 这两个引脚上。
COM2 公头连接到 STM32MP1 的 USART3 接口上,COM2 和 RS485 共用 USART3,把JP4的3-5和4-6连接起来以后SP3232就和USRAT3连接到一起。USART3_TX和USART3_RX分别接到了 PD8 和 PD9 这两个引脚上。
RS485原理图:

与 COM2 共用 USART3,把 JP4 的 3-5 和 4-6 连接起来,RS485 就连接到了 USART3 上。
RS485 采用 SP3485 芯片实现,RO 为数据输出端,RI 为数据输入端,RE 是接收使能信号(低电平有效),DE 是发送使能信号(高电平有效)。图中 RE 和 DE 经过一系列的电路,最终通过 RS485_RX 来控制,这样可以省掉一个 RS485 收发控制 IO,将 RS485完全当作一个串口来使用,方便写驱动。
GPS原理图:
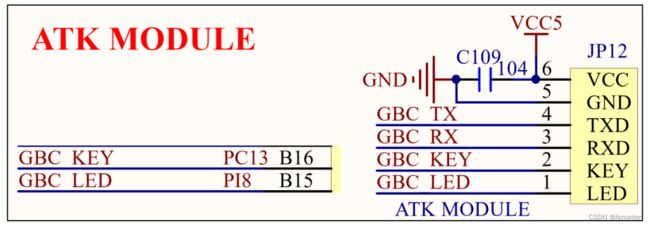
正点原子有一款 GPS+北斗定位模块,型号为 ATK1218-BD,只在开发板上留出了接口。COM1 和正点原子的 ATK 模块共用 USART5 接口,USART5 驱动成功以后就可以直接读取 GPS 模块数据了。ATK 模块还有两个引脚 GBC_KEY 和 GBC_LED 分别连接到了 STM32MP157 的 PC13 和 PI8 上,这两个引脚是给其他模块准备的,GPS 模块没有用到。
1.RS232驱动编写
1)添加 usart3 和 uart5 的引脚信息
STM32MP1 的 UART 驱动 ST 已经编写好了,所以不需要自己编写。只用在设备树中添加 USART3 和 UART5 对应的设备节点即可。并且因为 usart3 和 uasrt5 的节点在 stm32mp151.dtsi 已经存在,所以只用在自己的设备树中追加内容即可。
修改 stm32mp15-pinctrl.dtsi,追加一个 usart3 引脚设置:

追加 uart5 引脚设置:

在设备树 stm32mp157d-atk.dtsi 中追加串口设备节点:
&usart3 {
pinctrl-names = "default";
pinctrl-0 = <&usart3_pins_c>;
status = "okay";
};
&uart5 {
pinctrl-names = "default";
pinctrl-0 = <&uart5_pins_a>;
status = "okay";
};
设置串口的别名:
aliases {
serial0 = &uart4;
serial1 = &uart5;
serial2 = &usart3;
};
在根节点/下原先存在 aliases 子节点,在其中追加 uart5 和 usart3 的别名,用于 UART 子系统的匹配。
修改完成后编译出新的设备树文件,用于开发板启动。
2)移植minicom
minicom 类似常用的串口调试助手,是 Linux 下很常用的一个串口工具,将 minicom 移植到开发板中,这样就可以借助 minicom 对串口进行读写操作。
buildroot 已经集成了 minicom,所以只需要重新配置 buildroot,使能 minicom 即可。在buildroot的menuconfig中,选中以下编译项:

修改完成后保存,然后使用sudo make进行编译,将编译出的rootfs.tar文件解压到nfs即可用于开发板启动。启动后使用minicom -v命令查看是否正常工作,使用minicom -s命令进行配置。

四、驱动测试
RS232连接:
左边的 COM2 为公头,可以通过 JP4 跳接到 USART3上。右边的 COM1 为母头,可以通过 JP5 跳接到 UART5 上。本节使用右边的 COM1,所以将 JP5 的两个跳线帽接到上方,也就是将 UART5 与 COM1 连接起来。
使用RS232转TTL线连接到电脑,就可以进行收发测试。在开发板上使用minicom -s命令配置UART5。


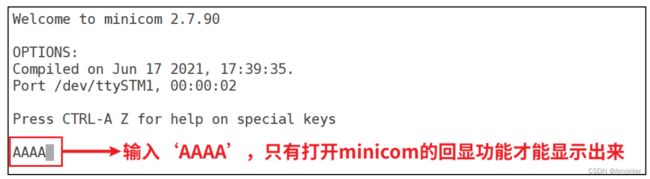
按下Ctrl + A,再按下 Z,就会出现以下界面:

1.RS232收发测试
发送测试:需要打开 minicom 的回显功能(不打开也可以,但是在 minicom 中看不到自己输入的内容),回显功能打开以后输入“AAAA”,在电脑的串口助手就会收到消息。

接收测试:在电脑上的串口助手发送消息,在开发板上就能接收到。

使用 Ctrl + A然后按下 X 键关闭minicom。
2.RS485测试

将JP4 跳线帽的 1-3、2-4 连接起来,此外还需要一个RS485转接器,与电脑进行连接。

收发测试与RS232相同。
3.GPS测试
GPS模块大部分都是通过串口通信的,使用开发板上的 JP5 跳线帽,将 UART5 与 ATK 模块接口上的串口连接起来。
然后设置minicom,波特率设置为 38400,8 位数据位, 1 位停止位。

之后就可以接收到GPS发送的数据。