基于stm32控制的ESP8266在路由模式下通讯
这里的思路还是指令都和51那里相同,思路是一样的,唯一不同的是中断处理程序不同。这里是一个细节问题,在最后我会比较51和32在中断程序里处理的小插曲,之前没有注意过这个问题,导致单片机通过ESP8266给网络助手发消息没问题,但是网络助手通过ESP8266给单片机发指令没有反应。如果你对51控制ESP8266比较熟悉的话,可以直接往下看,如果不是很熟悉可以看一下我的这篇文章http://t.csdnimg.cn/UQ9ON,接着我们往下看。
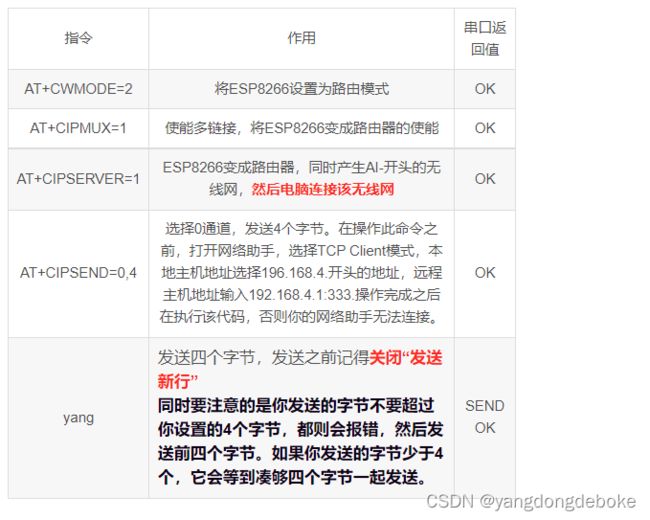
一、用到的指令
二、代码部分
#include "main.h"
#include "usart.h"
#include "gpio.h"
#include
#include
//串口接收缓存(1字节)
uint8_t buf=0;
//定义最大接收字节数 200,可根据需求调整
#define UART1_REC_LEN 200
// 接收缓冲, 串口接收到的数据放在这个数组里,最大UART1_REC_LEN个字节
uint8_t UART1_RX_Buffer[UART1_REC_LEN];
// 接收状态
// bit15, 接收完成标志
// bit14, 接收到0x0d
// bit13~0, 接收到的有效字节数目
uint16_t UART1_RX_STA=0;
#define SIZE 12
char buffer[SIZE];
//1 工作在路由模式
char LYMO[] = "AT+CWMODE=2\r\n";
//2 使能多链接
char DLJ[] = "AT+CIPMUX=1\r\n";
//3 建立TCPServer
char JLFW[] = "AT+CIPSERVER=1\r\n"; // default port = 333
//发送数据
char FSSJ[] = "AT+CIPSEND=0,4\r\n";
char AT_OK_Flag = 0; //OK返回值的标志位
char AT_Connect_Net_Flag = 0; //WIFI GOT IP返回值的标志位
char Client_Connect_Flag = 0;
void SystemClock_Config(void);
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
// 判断中断是由哪个串口触发的
if(huart->Instance == USART1)
{
// 判断接收是否完成(UART1_RX_STA bit15 位是否为1)
if((UART1_RX_STA & 0x8000) == 0)
{
// 如果已经收到了 0x0d (回车),
if(UART1_RX_STA & 0x4000)
{
// 则接着判断是否收到 0x0a (换行)
if(buf == 0x0a)
{
// 如果 0x0a 和 0x0d 都收到,则将 bit15 位置为1
UART1_RX_STA |= 0x8000;
// 查看是否收到 OK
if(!strcmp(UART1_RX_Buffer, "OK"))
AT_OK_Flag = 1;
// 查看是否收到 FAIL
if(!strcmp(UART1_RX_Buffer, "0,CONNECT"))
Client_Connect_Flag = 1;
// 灯控指令
if(!strcmp(UART1_RX_Buffer, "+IPD,0,5:L-1"))
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);
}
if(!strcmp(UART1_RX_Buffer, "+IPD,0,5:L-0"))
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);
memset(UART1_RX_Buffer, 0, UART1_REC_LEN);
UART1_RX_STA = 0;
}
else
// 否则认为接收错误,重新开始
UART1_RX_STA = 0;
}
else // 如果没有收到了 0x0d (回车)
{
//则先判断收到的这个字符是否是 0x0d (回车)
if(buf == 0x0d)
{
// 是的话则将 bit14 位置为1
UART1_RX_STA |= 0x4000;
}
else
{
// 否则将接收到的数据保存在缓存数组里
UART1_RX_Buffer[UART1_RX_STA & 0X3FFF] = buf;
UART1_RX_STA++;
// 如果接收数据大于UART1_REC_LEN(200字节),则重新开始接收
if(UART1_RX_STA > UART1_REC_LEN - 1)
UART1_RX_STA = 0;
}
}
}
// 重新开启中断
HAL_UART_Receive_IT(&huart1, &buf, 1);
}
}
int fputc(int ch, FILE *f)
{
unsigned char temp[1]={ch};
HAL_UART_Transmit(&huart1,temp,1,0xffff);
return ch;
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_USART2_UART_Init();
/* USER CODE BEGIN 2 */
HAL_NVIC_SetPriority(SysTick_IRQn,0,0);
// 开启接收中断
HAL_UART_Receive_IT(&huart1, &buf, 1);
HAL_UART_Transmit(&huart2, "let's go\r\n", strlen("let's go\r\n"), 100);
printf(LYMO);
while(!AT_OK_Flag) HAL_Delay(50);
HAL_UART_Transmit(&huart2, "111\r\n", strlen("111\r\n"), 100);
AT_OK_Flag = 0;
printf(DLJ);
while(!AT_OK_Flag) HAL_Delay(50);
HAL_UART_Transmit(&huart2, "222\r\n", strlen("222\r\n"), 100);
AT_OK_Flag = 0;
printf(JLFW);
while(!Client_Connect_Flag) HAL_Delay(50);
HAL_UART_Transmit(&huart2, "333\r\n", strlen("333\r\n"), 100);
AT_OK_Flag = 0;
if(Client_Connect_Flag){
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_9, GPIO_PIN_RESET);
}
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
//4 发送数据
printf(FSSJ);
HAL_Delay(2000);
printf("yang");
HAL_Delay(2000);
}
/* USER CODE END 3 */
} 三、调试分析的结果
原来的代码与初始的代码的差别仅仅在中断函数里的一个小处理上
中断函数里原来的代码
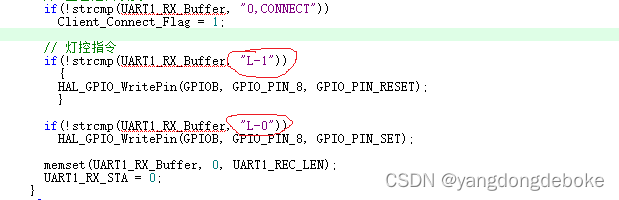
中断函数里现在的代码

我初始的把代码烧进去后,启动单片机,ESP8266上电,配置成了模式路由模式,然后单片机也在发送数据“yang”给ESP8266,在通过ESP8266发给网络助手,一切都顺利。按照我原来的想法,当我在网络串口助手里输入L-1回车发送后,就可以让网络助手把"L-1"发给ESP8266,接着ESP8266把"L-1"发给单片机的串口一的接收寄存器,这样用过if里strcmp比较,两个都是“L-1”就可以完成亮灯的操作,熄灯的操作也一个思路这样。
但是理想很丰满,现实很骨感。这就要说说我开篇就说的一个小细节了
我们把ESP8266单独拿出来测试,将ESP8266于USB转TTL连接,然后接到电脑的插口上,打开串口助手,把他配置到路由模式,然后将电脑连接到上ESP8266生成的网络,最后在把上面的指令在窗口中单独实行一遍。
如下图所示

当我用网络助手给esp8266发送L-1加回车,L-0加回车时,我看到esp8266反馈的是+IPD,0,5:L-1和+IPD,0,5:L-0,而不是我以为的L-1,L-0。所以后来才有在中断里面修改了代码,后来就可以用了。
四、51的中断代码与32中断代码的比较
有的人可能看过51的代码,然后可能会想。为啥51的都没有加上if(!strcmp(UART1_RX_Buffer, "+IPD,0,5:L-1"))也可以用,我们回看一下51中断里面的操作就知道了:
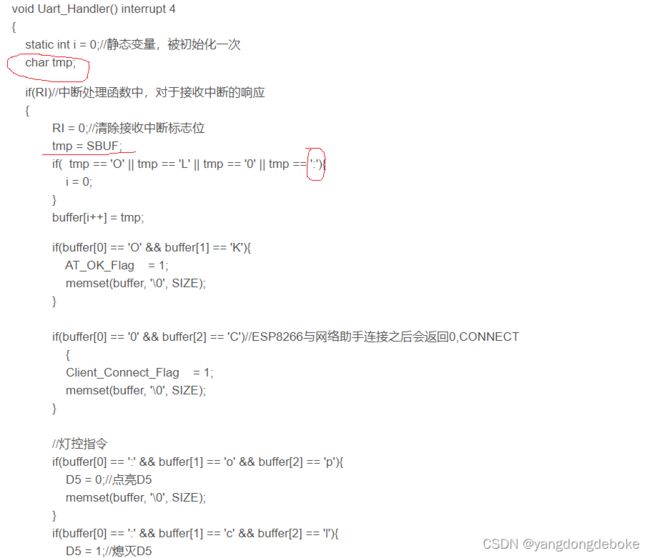
51的中断里,收到的数据并不是像我们32这里一样全盘接受,而是等到有了相应的字节才开始以一字节一字节的接收,只接收有用的字节来比较,所以51那里的程序也可以控制。只不过是中断执行的思路不同罢了。