CANoe制作网关实现CAN(FD)报文故障注入(报文长度/timeout/信号错误/E2E)1
CANoe制作网关实现CAN报文故障注入(报文长度/timeout/信号错误/E2E)
内容分为两篇:
CANoe制作网关实现CAN(FD)报文故障注入(报文长度/timeout/信号错误/E2E)1
CANoe制作网关实现CAN(FD)报文故障注入(报文长度/timeout/信号错误/E2E)2
文章目录
- CANoe制作网关实现CAN报文故障注入(报文长度/timeout/信号错误/E2E)
- 1.基本介绍和实现功能
1.基本介绍和实现功能
下面是一个完整的CAN/CANFD总线,上面挂了几个ECU。

下面要求对这条总线做一些故障注入的测试,改变某个报文的长度,使某个信号的值异常等。为了实现这些,我们使用一个CANoe充当网关,将某个ECU从总线上断开,CANoe的一个通道接到总线上,一个通道接到被断开的ECU上。
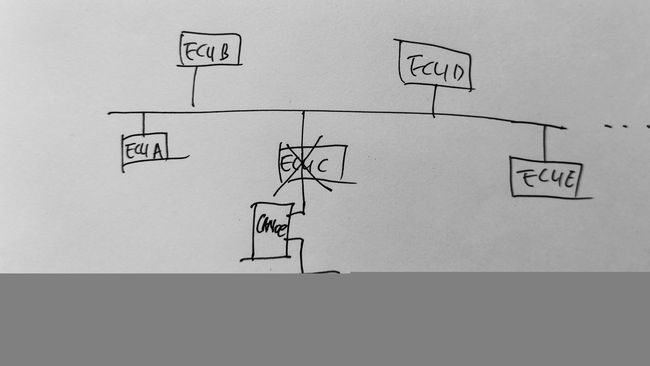
为了保证这条总线工作正常,我们首先需要实现的是透传的功能,从图上来看,ECU C的报文要转到总线上,总线上的报文也要转给ECU C,比如这里我们拿CANoe的通道1接到总线上,通道2接到ECU C,这里要实现的功能就是,CAN1收到的报文发到CAN2上,CAN2收到的报文发到CAN1上。故障注入的也是基于此实现的。
基于此,ECU C和总线的通信就通过CANoe来转发,这里我们可以操作的内容就多了,所有经过CANoe的报文我们都可以篡改。
我们可以:
修改报文的长度;
使某个报文停发;
修改某个信号的值;
E2E的信号修改,以及修改某个信号的之后按照正确的E2E计算;
故障注入时间的精确控制,故障注入开始结束的控制。
上面使我们要实现测试的内容,我们通过CANoe具体去实现什么样的功能如下:
1.透传功能;
2.注入通道的选择;
3.故障注入类型的选择(报文长度/timeout/信号错误/E2E);
4.故障注入开始与结束的控制,以及故障注入时间的定时;
5.实现多个报文同时注入故障,双向的故障注入;
6.输入要修改的信号以及修改的值对该信号进行故障注入;
7.E2E crc信号:其他信号输入错误的值后,按照错误值进行正确的crc计算。
其中6、7两点是本文的重点和难点,使用的方法在这篇文章有介绍:
CAPL通过lookupSignal和DBLookup获取DBC信号的属性信息。
实现面板如下:

本文介绍要实现的功能,下篇介绍如何实现。
CANoe制作网关实现CAN(FD)报文故障注入(报文长度/timeout/信号错误/E2E)2