CAN协议详解
1.CAN 协议概述
简介
CAN 是控制器局域网络 (Controller Area Network) 的简称,它是由研发和生产汽车电子产品著称的德国 BOSCH 公司开发的,并最终成为国际标准(ISO11519以及ISO11898),是国际上应用最广泛的现场总线之一。是一种串行的差分总线,并且这种差分总线只传递数据信息。
随着车用电气设备增加,对应的电气节点剧增(高档车节点有上千之多),一般的通信协议需要的线束太多。需要减少线束,支持更多节点的协议。
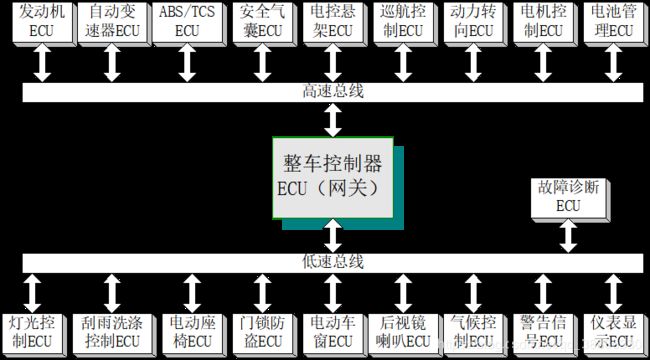
CAN 总线协议已经成为汽车计算机控制系统和嵌入式工业控制局域网的标准总线,并且拥有以CAN 为底层协议专为大型货车和重工机械车辆设计的 J1939 协议。近年来,它具有的高可靠性和良好的错误检测能力受到重视,总线仲裁等优良特点,被广泛应用在汽车控制系统、环境恶劣场所、电磁辐射强、干扰性大等场所中。
CAN是一种异步的通信方式,它的通讯不需要时钟进行同步,线路上只有CAN_H、CAN_L两根通信线,数据以差分信号的方式进行传输。
CAN的特点
①多主控制(I2C有主从机之分,CAN无所谓主机从机)
- 在总线空闲时,所有的单元都可开始发送消息(多主控制)
- “最先”访问总线的单元可获得发送权(不管后面消息的优先级是否比自身的高)
- 多个单元“同时”开始发送时,发送高优先级 ID 消息的单元可获得发送权(只在同时发送时起作用)
②消息的发送(对比I2C是根据地址进行访问,这里ID非地址,而是一种表征优先级的标识符)
在 CAN 协议中,所有的消息都以固定的格式发送。当两个以上的单元同时开始发送消息时,根据ID (标识符) 决定优先级,对各消息 ID 的每个位进行逐个仲裁比较。仲裁获胜(被判定为优先级最高)的单元可继续发送消息,仲裁失利的单元则立刻停止发送而进行接收工作,此处这里ID非地址,而是一种表征优先级的标识符
③系统的柔软性(对比I2C总线上的每个单元都有一个独立的地址)
与总线相连的单元没有类似于“地址”的信息。因此在总线上增加单元时,连接在总线上的其它单元的都不需要改变。
④通信速度(波特率)
由CAN的物理层就可以看出,CAN是一种异步通信方式,所以通信前必须统一好同一网络上每个单元的波特率,即使有一个单元的通信速度与其它的不一样,此单元也会输出错误信号,妨碍整个网络的通信。不同网络间则可以有不同的通信速度。
⑤远程数据请求
可通过发送“遥控帧” 请求其他单元发送数据。
⑥错误检测功能·错误通知功能·错误恢复功能
所有的单元都可以检测错误(错误检测功能)检测出错误的单元会立即同时通知其他所有单元(错误通知功能)正在发送消息的单元一旦检测出错误,会强制结束当前的发送。强制结束发送的单元会不断反复地重新发送此消息直到成功发送为止(错误恢复功能)
⑦故障封闭
CAN 可以判断出错误的类型是总线上暂时的数据错误(如外部噪声等)还是持续的数据错误(如单元内部故障、驱动器故障、断线等)。由此功能,当总线上发生持续数据错误时,可将引起此故障的单元从总线上隔离出去。
⑧连接
CAN 总线可连接的单元总数理论上是没有限制的。但实际上可连接的单元数受总线上的时间延迟及电气负载的限制。
CAN总线优点
1、数据传递更安全可靠;
2、低成本(通信介质可采用双绞线,同轴电缆和光导纤维,一般采用廉价的双绞线即可,无特殊要求);
3、高速实时传递;
4、有条件实现单线功能;
5、适用于各种汽车;
6、开放的标准。
2、CAN 物理层
与 I2C、SPI 等具有时钟信号的同步通讯方式不同,CAN 通讯并不是以时钟信号来进行同步的,它是一种异步通讯,只具有 CAN_High 和 CAN_Low 两条信号线,共同构成一组差分信号线,以差分信号的形式进行通讯。
- CAN是半双工的,在同一时刻,一个通讯节点发送消息,其他节点只能接收消息;
- CAN物理层的形式分为闭环总线和开环总线,闭环总线是高速短距离的,长度最长40m,通信速度最高10Mbps;开环总线是低速远距离的,长度最长1km,通信速度最高125kbps。开环闭环的主要区别在于差分信号线是不是连在一起的。
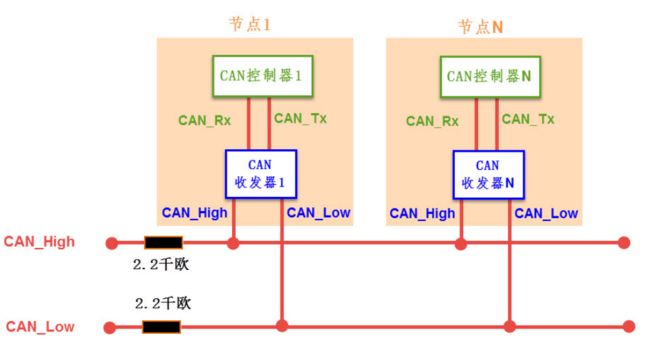
- CAN总线可以挂载多个节点:
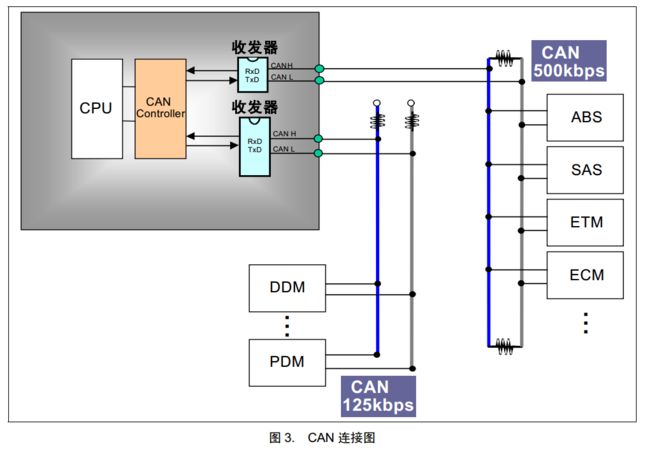
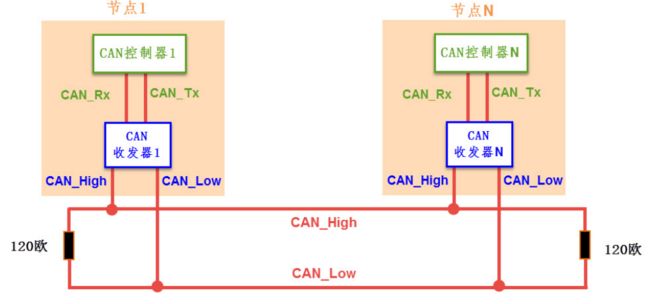
CAN通讯节点由一个CAN控制器及CAN收发器组成,控制器与 收发器之间通过Can_Tx及CAN_Rx信号线连接,收发器与CAN总线之间使用CAN_High及CAN_Low信号线相连。其中CAN_TX及CAN_Rx使用普通的类似TTL逻辑信号,而CAN_Hig及CAN Low是一对差分信号线,使用比较特别的差分信号。
当CAN节点需要发送数据时,控制器把要发送的二进制编码通过CAN_TX线发送到收发器,然后由收发器把这个普通的逻辑电平信号转化成差分信号 ,通过差分线CAN_Hig和CAN Low输出到Can总线网络。而通过收发器接收总线上的数据到控制器时,则是相反的过程,收发器把总线上收到的CAN_High及CAN_Low信号转化成普通的逻辑电平信号,通过CAN_Rx输出到控制器中。
can收发器接口
(1)常用三种接口器件
M12小型连接器、OPEN5连接端子、DB9插座
干扰问题
(1)两条数据线相互缠绕,防止电磁波干扰和向外辐射,规定绞距20mm。
扩展:
- 差分信号:两根信号线的幅度相同,相位相反,通过电压差代表电平1和0;差分信号优点:抗干扰能力强,因为有外界噪声干扰时,会同时耦合到这两条信号线上,由于接收端只关心信号的差值,因此噪声可以抵消。
- 逻辑电平为1是隐性电平,CAN_High和CAN_Low电压都是2.5v,压差为0;逻辑电平为0显性电平,CAN_High电压3.5v和CAN_Low电压1.5v,压差2v。“显性”具有“优先”的意味,只要有一个单元输出显性电平,总线上即为显性电平。并且,“隐性”具有“包容”的意味,只有所有的单元都输出隐性电平,总线上才为隐性电平。(显性电平比隐性电平更强。)
CAN的通信网络
闭环通信网络的特点如下:
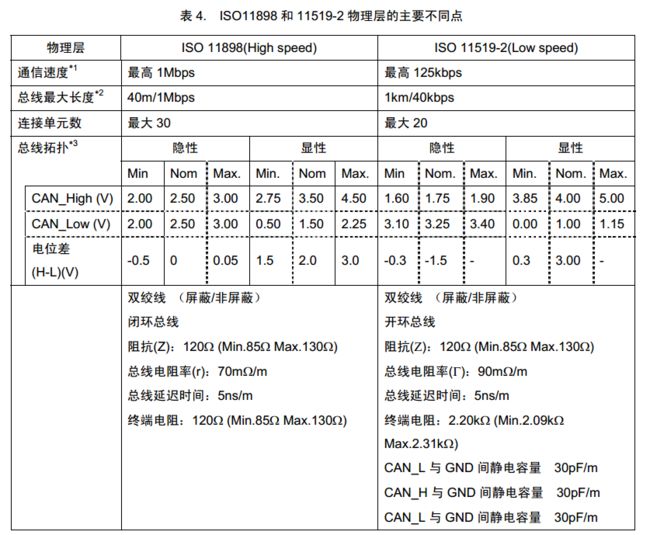
1)遵照标准为 ISO11898;
2)最高速度可达1Mbps,总线最大长度为40m;
3)总线的两端要求各有一个120欧姆的电阻。
开环通信网络的特点如下:
1)遵循ISO11519-2标准;
2)最高的通信速度为125Kbps,是一种低速通信的连接方式;
3)最大的通信距离可达1Km;
4)两根总线独立,且要求每根总线上要串联一个2.2K欧姆的电阻。
CAN的通信速率
按照 ISO11898 标准中所规定的,CAN总线的通讯波特率最高为 1Mbps。大多数项目常用的CAN总线波特率有125Kbits/s,250Kbits/s,500Kbits/s,1MKbits/s等。
ISO 分类:
低速型 低于10 kbps (用于后视镜调整、电动窗、灯光照明、雨刷器等,称作LIN总线)
低速型 10 -125 kbps (用于舒适系统、仪表显示等)
高速型 125 kbps -1Mbps (用于发动机控制、ABS、传动控制等)
最多接入控制单元数:32个
通用版本:Bosch CAN 2.0
3.CAN协议
帧的种类及用途
帧的类型 |
用途 |
| 数据帧 | 用于发送单元向接收单元传送数据 |
| 遥控帧 | 用于接收单元向具有相同ID的发送单元请求数据的帧 |
| 错误帧 | 用于检测出错误时向其他单元通知错误的帧 |
| 过载帧 | 用于接收单元通知其尚未做好接收准备的帧 |
| 帧间隔 | 用于将数据帧及遥控帧与前面的帧分离的帧 |
数据帧
数据帧的构成
数据帧由7个段构成,分别是:
(1) 帧起始:表示数据帧开始的段。
(2) 仲裁段:表示该帧优先级的段。
(3) 控制段:表示数据的字节数及保留位的段。
(4) 数据段:数据的内容,可发送 0~8 个字节的数据。
(5) CRC 段:检查帧的传输错误的段。
(6) ACK 段:表示确认正常接收的段。
(7) 帧结束:表示数据帧结束的段。
遥控帧
遥控帧的构成
遥控帧由6个段构成,分别是:
(1) 帧起始(SOF):表示帧开始的段。
(2) 仲裁段:表示该帧优先级的段。可请求具有相同 ID 的数据帧。
(3) 控制段:表示数据的字节数及保留位的段。
(4) CRC 段:检查帧的传输错误的段。
(5) ACK 段:表示确认正常接收的段。
(6) 帧结束:表示遥控帧结束的段。
错误帧
错误帧的构成
(1) 错误标志
错误标志包括主动错误标志和被动错误标志两种。
主动错误标志:6 个位的显性位。
被动错误标志:6 个位的隐性位。
(2) 错误界定符
错误界定符由 8 个位的隐性位构成
过载帧
过载帧的构成
(1) 过载标志
6 个位的显性位。
过载标志的构成与主动错误标志的构成相同。
(2) 过载界定符
8 个位的隐性位。
过载界定符的构成与错误界定符的构成相同。
帧间隔
帧间隔的构成
帧间隔是用于分隔数据帧和遥控帧的帧。数据帧和遥控帧可通过插入帧间隔将本帧与前面的任何帧(数据帧、遥控帧、错误帧、过载帧)分开。
过载帧和错误帧前不能插入帧间隔。
(1) 间隔
3 个位的隐性位。
(2) 总线空闲
隐性电平,无长度限制(0 亦可)。本状态下,可视为总线空闲,要发送的单元可开始访问总线。
(3) 延迟传送(发送暂时停止)
8 个位的隐性位。只在处于被动错误状态的单元刚发送一个消息后的帧间隔中包含的段。