人工智能——猫狗大战
人工智能——猫狗大战
- 简介
- 代码运行
- AI研习社测试
- 总结
简介
Cats vs. Dogs(猫狗大战)是Kaggle大数据竞赛某一年的一道赛题,利用给定的数据集,用算法实现猫和狗的识别。我们希望通过对计算机进行大量的图片训练,使计算机可以学习识别到猫、狗的特征,最终可以对大量的未知图片进行分类。这就涉及到计算机视觉中的图像分类问题。图像分类,计算机视觉研究领域之一,计算机通过学习图像本身的特征将不同类别的图像区分开来。
本次实验我选择使用VGG模型进行。
代码运行
载入头文件以及分配GPU设备
import numpy as np
import matplotlib.pyplot as plt
import os
import torch
import torch.nn as nn
import torchvision
from torchvision import models,transforms,datasets
import time
import json
# 判断是否存在GPU设备
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print('Using gpu: %s ' % torch.cuda.is_available())
下载数据
! wget http://fenggao-image.stor.sinaapp.com/dogscats.zip
! unzip dogscats.zip

加载数据并进行图片裁剪、归一化等处理
#对图像标准化,加速模型收敛
normalize = transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
vgg_format = transforms.Compose([
transforms.CenterCrop(224),
transforms.ToTensor(),
normalize,
])
data_dir = './dogscats'
dsets = {x: datasets.ImageFolder(os.path.join(data_dir, x), vgg_format)
for x in ['train', 'valid']}
dset_sizes = {x: len(dsets[x]) for x in ['train', 'valid']}
dset_classes = dsets['train'].classes
loader_train = torch.utils.data.DataLoader(dsets['train'], batch_size=64, shuffle=True, num_workers=6)
loader_valid = torch.utils.data.DataLoader(dsets['valid'], batch_size=5, shuffle=False, num_workers=6)
'''
valid 数据一共有2000张图,每个batch是5张,因此,下面进行遍历一共会输出到 400
同时,把第一个 batch 保存到 inputs_try, labels_try,分别查看
'''
count = 1
for data in loader_valid:
print(count, end='\n')
if count == 1:
inputs_try,labels_try = data
count +=1
print(labels_try)
print(inputs_try.shape)
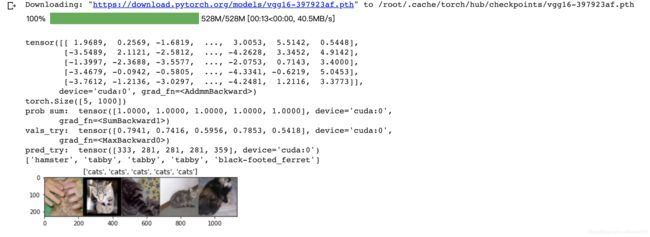
下载 ImageNet 1000 个类的 JSON 文件,并对VGG预模型的效果进行测试
!wget https://s3.amazonaws.com/deep-learning-models/image-models/imagenet_class_index.json
model_vgg = models.vgg16(pretrained=True)
with open('./imagenet_class_index.json') as f:
class_dict = json.load(f)
dic_imagenet = [class_dict[str(i)][1] for i in range(len(class_dict))]
inputs_try , labels_try = inputs_try.to(device), labels_try.to(device)
model_vgg = model_vgg.to(device)
outputs_try = model_vgg(inputs_try)
print(outputs_try)
print(outputs_try.shape)
'''
可以看到结果为5行,1000列的数据,每一列代表对每一种目标识别的结果。
但是我也可以观察到,结果非常奇葩,有负数,有正数,
为了将VGG网络输出的结果转化为对每一类的预测概率,我们把结果输入到 Softmax 函数
'''
m_softm = nn.Softmax(dim=1)
probs = m_softm(outputs_try)
vals_try,pred_try = torch.max(probs,dim=1)
print( 'prob sum: ', torch.sum(probs,1))
print( 'vals_try: ', vals_try)
print( 'pred_try: ', pred_try)
print([dic_imagenet[i] for i in pred_try.data])
imshow(torchvision.utils.make_grid(inputs_try.data.cpu()),
title=[dset_classes[x] for x in labels_try.data.cpu()])
 修改模型
修改模型
我们的目标是使用预训练好的模型,因此,需要把最后的 nn.Linear 层由1000类,替换为2类。为了在训练中冻结前面层的参数,需要设置 required_grad=False。这样,反向传播训练梯度时,前面层的权重就不会自动更新了。训练中,只会更新最后一层的参数。
print(model_vgg)
model_vgg_new = model_vgg;
for param in model_vgg_new.parameters():
param.requires_grad = False
model_vgg_new.classifier._modules['6'] = nn.Linear(4096, 2)
model_vgg_new.classifier._modules['7'] = torch.nn.LogSoftmax(dim = 1)
model_vgg_new = model_vgg_new.to(device)
print(model_vgg_new.classifier)
训练模型
from tqdm import trange,tqdm
'''
第一步:创建损失函数和优化器
损失函数 NLLLoss() 的 输入 是一个对数概率向量和一个目标标签.
它不会为我们计算对数概率,适合最后一层是log_softmax()的网络.
'''
criterion = nn.NLLLoss()
# 学习率
lr = 0.001
# 随机梯度下降
optimizer_vgg = torch.optim.SGD(model_vgg_new.classifier[6].parameters(),lr = lr)
'''
第二步:训练模型
'''
def train_model(model,dataloader,size,epochs=100,optimizer=None):
model.train()
for epoch in range(epochs):
running_loss = 0.0
running_corrects = 0
max_a = 0
count = 0
for inputs,classes in dataloader:
inputs = inputs.to(device)
classes = classes.to(device)
outputs = model(inputs)
loss = criterion(outputs,classes)
optimizer = optimizer
optimizer.zero_grad()
loss.backward()
optimizer.step()
_,preds = torch.max(outputs.data,1)
# statistics
running_loss += loss.data.item()
running_corrects += torch.sum(preds == classes.data)
count += len(inputs)
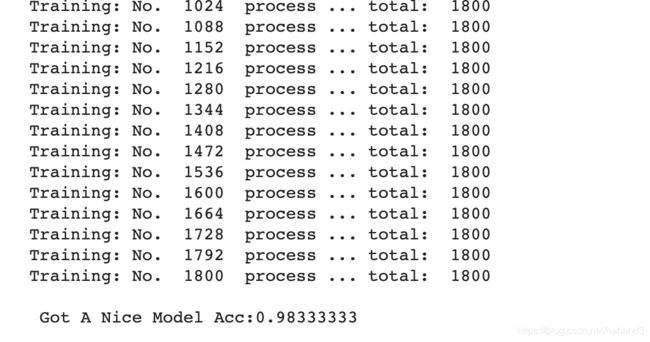
print('Training: No. ', count, ' process ... total: ', size)
epoch_loss = running_loss / size
epoch_acc = running_corrects.data.item() / size
if epoch_acc>max_a:
max_a = epoch_acc
torch.save(model, '/content/drive/My Drive/model_best_new.pth')
tqdm.write("\n Got A Nice Model Acc:{:.8f}".format(max_a))
tqdm.write('\nepoch: {} \tLoss: {:.8f} Acc: {:.8f}'.format(epoch,epoch_loss, epoch_acc))
time.sleep(0.1)
print('Loss: {:.4f} Acc: {:.4f}'.format(
epoch_loss, epoch_acc))
torch.save(model, '/content/drive/My Drive/model_last_new.pth')
tqdm.write("Got A Nice Model")
# 模型训练
train_model(model_vgg_new,loader_train,size=dset_sizes['train'], epochs=100,
optimizer=optimizer_vgg)
我对模型进行了修改,修改点:
- 把epochs修改为100
- 每一个epoch结束,都会计算loss 和acc,然后把acc最高的那一时刻的model覆盖保留
训练结果
创建测试模型并使用测试集进行测试
def test_model(model,dataloader,size):
model.eval()
predictions = np.zeros(size)
all_classes = np.zeros(size)
all_proba = np.zeros((size,2))
i = 0
running_loss = 0.0
running_corrects = 0
for inputs,classes in dataloader:
inputs = inputs.to(device)
classes = classes.to(device)
outputs = model(inputs)
loss = criterion(outputs,classes)
_,preds = torch.max(outputs.data,1)
# statistics
running_loss += loss.data.item()
running_corrects += torch.sum(preds == classes.data)
predictions[i:i+len(classes)] = preds.to('cpu').numpy()
all_classes[i:i+len(classes)] = classes.to('cpu').numpy()
all_proba[i:i+len(classes),:] = outputs.data.to('cpu').numpy()
i += len(classes)
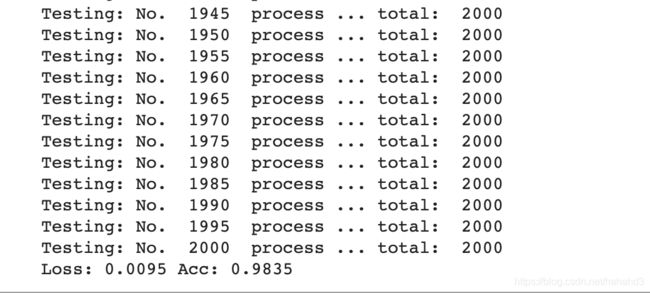
print('Testing: No. ', i, ' process ... total: ', size)
epoch_loss = running_loss / size
epoch_acc = running_corrects.data.item() / size
print('Loss: {:.4f} Acc: {:.4f}'.format(
epoch_loss, epoch_acc))
return predictions, all_proba, all_classes
predictions, all_proba, all_classes = test_model(model_vgg_new,loader_valid,size=dset_sizes['valid'])
测试结果
AI研习社测试
加载测试研习社测试数据对模型进行测试
import torch
import numpy as np
from torchvision import transforms,datasets
from tqdm import tqdm
device = torch.device("cuda:0" )
normalize = transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
vgg_format = transforms.Compose([
transforms.CenterCrop(224),
transforms.ToTensor(),
normalize,
])
#注意这里,我的数据在yanxishe这个文件夹里
dsets_mine = datasets.ImageFolder(r"/content/drive/MyDrive", vgg_format)
loader_test = torch.utils.data.DataLoader(dsets_mine, batch_size=1, shuffle=False, num_workers=0)
#模型的具体地址需要根据具体情况修改
model_vgg_new = torch.load(r'/content/drive/My Drive/model_best_new.pth')
model_vgg_new = model_vgg_new.to(device)
测试
dic = {}
def test(model,dataloader,size):
model.eval()
predictions = np.zeros(size)
cnt = 0
for inputs,_ in tqdm(dataloader):
inputs = inputs.to(device)
outputs = model(inputs)
_,preds = torch.max(outputs.data,1)
#这里是切割路径,因为dset中的数据不是按1-2000顺序排列的
key = dsets_mine.imgs[cnt][0].split("\\")[-1].split('.')[0]
dic[key] = preds[0]
cnt = cnt +1
test(model_vgg_new,loader_test,size=2000)

结果写入
with open("result18.csv",'a+') as f:
for key in range(2000):
#这里的yanxishe/test/是我的图片路径,按需更换
f.write("{},{}\n".format(key,dic["/content/drive/MyDrive/test/"+str(key)]))

总结
经过本次试验,对VGG模型有了更深的理解。对模型进行修改后,模型准确率从90%提高到了98%,有较大提升。主要是通过增加epochs和保留较好的结果模型。