PCL-06-包围盒、模板匹配
1. 3D物体的包容盒
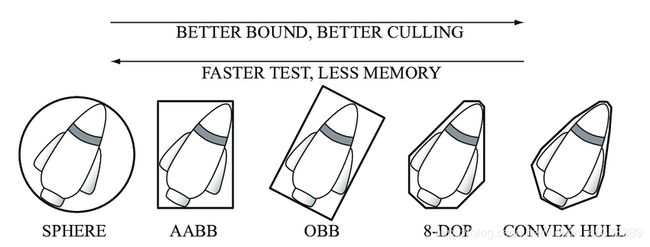
轴对齐包围盒(AABB)、有向包围盒(OBB)
// 创建惯性矩估算对象,设置输入点云,并进行计算
pcl::MomentOfInertiaEstimation <pcl::PointXYZ> feature_extractor;
feature_extractor.setInputCloud (cloud);
feature_extractor.compute ();
std::vector <float> moment_of_inertia;
std::vector <float> eccentricity;
pcl::PointXYZ min_point_AABB;
pcl::PointXYZ max_point_AABB;
pcl::PointXYZ min_point_OBB;
pcl::PointXYZ max_point_OBB;
pcl::PointXYZ position_OBB;
Eigen::Matrix3f rotational_matrix_OBB;
float major_value, middle_value, minor_value;
Eigen::Vector3f major_vector, middle_vector, minor_vector;
Eigen::Vector3f mass_center;
// 获取惯性矩
feature_extractor.getMomentOfInertia (moment_of_inertia);
// 获取离心率
feature_extractor.getEccentricity (eccentricity);
// 获取AABB盒子
feature_extractor.getAABB (min_point_AABB, max_point_AABB);
// 获取OBB盒子
feature_extractor.getOBB (min_point_OBB, max_point_OBB, position_OBB, rotational_matrix_OBB);
feature_extractor.getEigenValues (major_value, middle_value, minor_value);
// 获取主轴major_vector,中轴middle_vector,辅助轴minor_vector
feature_extractor.getEigenVectors (major_vector, middle_vector, minor_vector);
// 获取质心
feature_extractor.getMassCenter (mass_center);
// 添加AABB包容盒
viewer->addCube (min_point_AABB.x, max_point_AABB.x, min_point_AABB.y, max_point_AABB.y, min_point_AABB.z, max_point_AABB.z, 1.0, 1.0, 0.0, "AABB");
viewer->setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_REPRESENTATION, pcl::visualization::PCL_VISUALIZER_REPRESENTATION_WIREFRAME, "AABB");
// 添加OBB包容盒
Eigen::Vector3f position (position_OBB.x, position_OBB.y, position_OBB.z);
Eigen::Quaternionf quat (rotational_matrix_OBB);
// position:中心位置
// quat:旋转矩阵
// max_point_OBB.x - min_point_OBB.x 宽度
// max_point_OBB.y - min_point_OBB.y 高度
// max_point_OBB.z - min_point_OBB.z 深度
viewer->addCube (position, quat, max_point_OBB.x - min_point_OBB.x, max_point_OBB.y - min_point_OBB.y, max_point_OBB.z - min_point_OBB.z, "OBB");
viewer->setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_REPRESENTATION, pcl::visualization::PCL_VISUALIZER_REPRESENTATION_WIREFRAME, "OBB");
// 绘制主轴、中轴和辅助轴
pcl::PointXYZ center (mass_center (0), mass_center (1), mass_center (2));
pcl::PointXYZ x_axis (major_vector (0) + mass_center (0), major_vector (1) + mass_center (1), major_vector (2) + mass_center (2));
pcl::PointXYZ y_axis (middle_vector (0) + mass_center (0), middle_vector (1) + mass_center (1), middle_vector (2) + mass_center (2));
pcl::PointXYZ z_axis (minor_vector (0) + mass_center (0), minor_vector (1) + mass_center (1), minor_vector (2) + mass_center (2));
viewer->addLine (center, x_axis, 1.0f, 0.0f, 0.0f, "major eigen vector");
viewer->addLine (center, y_axis, 0.0f, 1.0f, 0.0f, "middle eigen vector");
viewer->addLine (center, z_axis, 0.0f, 0.0f, 1.0f, "minor eigen vector");

包围盒的种类
2. 模板匹配
求取 法向量、特征直方图pfh
// 创建表面法向量
normals_ = SurfaceNormals::Ptr(new SurfaceNormals);
// 计算表面法向量
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> norm_est;
norm_est.setInputCloud(xyz_);
norm_est.setSearchMethod(search_method_xyz_);
norm_est.setRadiusSearch(normal_radius_);
norm_est.compute(*normals_);
// Compute the local feature descriptors
/**
* 根据表面法向量 计算本地特征描述
*/
features_ = LocalFeatures::Ptr(new LocalFeatures);
pcl::FPFHEstimation<pcl::PointXYZ, pcl::Normal, pcl::FPFHSignature33> fpfh_est;
fpfh_est.setInputCloud(xyz_);
fpfh_est.setInputNormals(normals_);
fpfh_est.setSearchMethod(search_method_xyz_);
fpfh_est.setRadiusSearch(feature_radius_);
fpfh_est.compute(*features_);
// Intialize the parameters in the Sample Consensus Intial Alignment (SAC-IA) algorithm
sac_ia_.setMinSampleDistance(min_sample_distance_);
sac_ia_.setMaxCorrespondenceDistance(max_correspondence_distance_);
sac_ia_.setMaximumIterations(nr_iterations_);
std::vector<Result, Eigen::aligned_allocator<Result> > results;
alignAll(results);
完整代码,这部分我也没怎么看懂,等到后面研究到再补充。
#include