基于YOLOv8的交通摄像头下车辆检测算法(七):HIC-YOLOv8复现HIC-YOLOv5,助力小目标检测,涨点明显
本文改进:HIC-YOLOv8,1)添加一个针对小物体的额外预测头,以提供更高分辨率的特征图2)在backbone和neck之间采用involution block来增加特征图的通道信息;3)在主干网末端加入 CBAM 的注意力机制;
HIC-YOLOv8 小目标检测&复杂场景首选,实现涨点,在交通摄像头下车辆检测项目中, mAP50从原始的0.745提升至0.775
YOLOv8改进专栏:http://t.csdnimg.cn/hGhVK
学姐带你学习YOLOv8,从入门到创新,轻轻松松搞定科研;

1.交通摄像头车辆检测数据集介绍
数据集来源:极市开发者平台-计算机视觉算法开发落地平台-极市科技
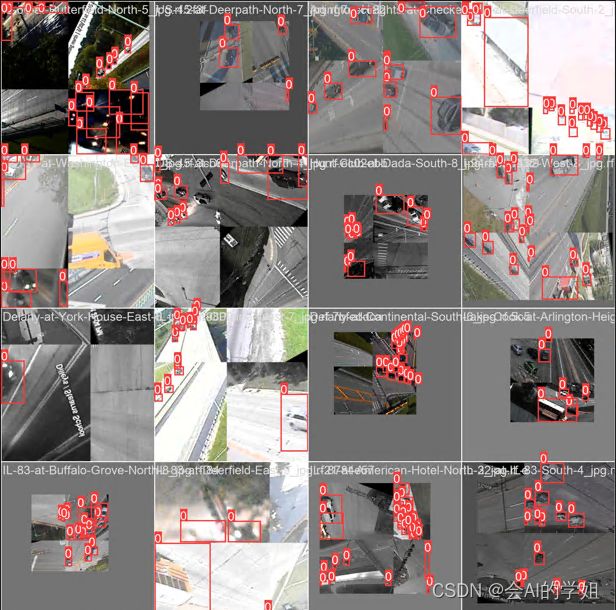
数据集类别“car",训练集验证集测试集分别5248,582,291张
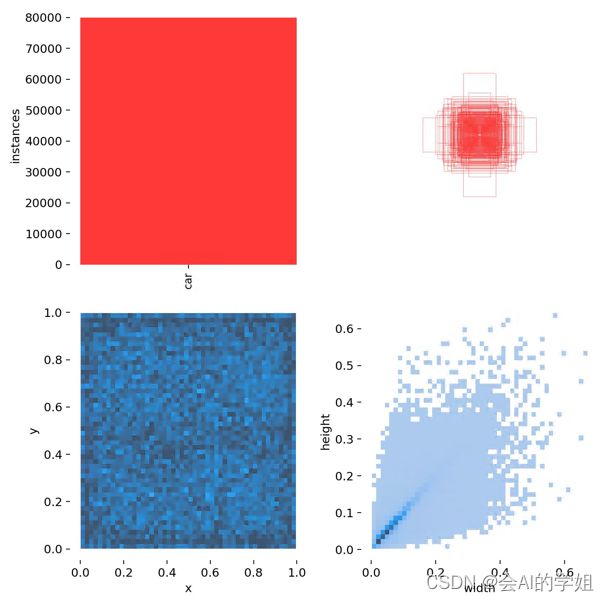
下图可以看出都是车辆数据集具有不同尺寸的目标物体,既有大目标又有小目标
1.1 小目标检测难点
本文所指的小目标是指COCO中定义的像素面积小于32*32 pixels的物体。小目标检测的核心难点有三个:
- 由本身定义导致的rgb信息过少,因而包含的判别性特征特征过少。
- 数据集方面的不平衡。这主要针对COCO而言,COCO中只有51.82%的图片包含小物体,存在严重的图像级不平衡。具体的统计结果见下图。
2.HIC-YOLOv5介绍
摘要:小目标检测一直是目标检测领域的一个具有挑战性的问题。 已经有一些工作提出了对该任务的改进,例如添加几个注意力块或改变特征融合网络的整体结构。 然而,这些模型的计算成本很大,这使得部署实时目标检测系统不可行,同时还有改进的空间。 为此,提出了一种改进的YOLOv5模型:HICYOLOv5来解决上述问题。 首先,添加一个针对小物体的额外预测头,以提供更高分辨率的特征图,以实现更好的预测。 其次,在backbone和neck之间采用involution block来增加特征图的通道信息。 此外,在主干网末端应用了一种名为 CBAM 的注意力机制,与之前的工作相比,不仅降低了计算成本,而且还强调了通道和空间域中的重要信息。 我们的结果表明,HIC-YOLOv5 在 VisDrone-2019-DET 数据集上将 mAP@[.5:.95] 提高了 6.42%,将 [email protected] 提高了 9.38%。

2.1 Convolutional Block Attention Module(CBAM)介绍
论文地址:https://arxiv.org/pdf/1807.06521.pdf
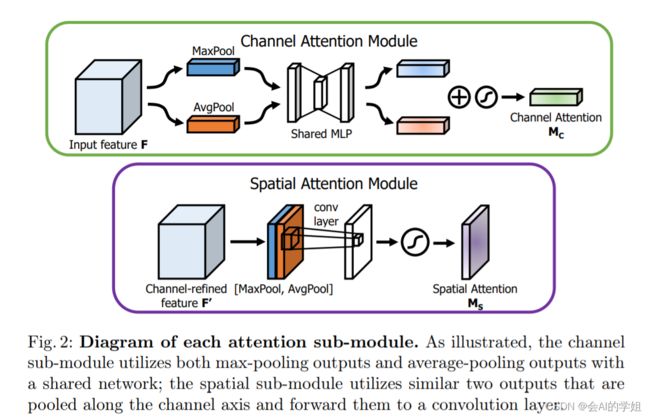
摘要:我们提出了卷积块注意力模块(CBAM),这是一种用于前馈卷积神经网络的简单而有效的注意力模块。 给定中间特征图,我们的模块沿着两个独立的维度(通道和空间)顺序推断注意力图,然后将注意力图乘以输入特征图以进行自适应特征细化。 由于 CBAM 是一个轻量级通用模块,因此它可以无缝集成到任何 CNN 架构中,且开销可以忽略不计,并且可以与基础 CNN 一起进行端到端训练。 我们通过在 ImageNet-1K、MS COCO 检测和 VOC 2007 检测数据集上进行大量实验来验证我们的 CBAM。我们的实验显示各种模型在分类和检测性能方面的持续改进,证明了 CBAM 的广泛适用性。 代码和模型将公开。

上图可以看到,CBAM包含CAM(Channel Attention Module)和SAM(Spartial Attention Module)两个子模块,分别进行通道和空间上的Attention。这样不只能够节约参数和计算力,并且保证了其能够做为即插即用的模块集成到现有的网络架构中去。
2.2 Involution原理介绍
论文链接:https://arxiv.org/abs/2103.06255
作者认为卷积操作的两个特征虽然也有一定的优势,但同样也有缺点。所以提出了Involution,Involution所拥有的特征正好和卷积相对称,即 spatial-specific and channel-agnostic
那就是通道无关和特定于空间。和卷积一样,内卷也有内卷核(involution kernels)。内卷核在空间范围上是不同的,但在通道之间共享。看到这里就有一定的画面感了。
内卷的优点:
1.可以在更大的空间范围中总结上下文信息,从而克服long-range interaction(本来的卷积操作只能在特定的小空间如3x3中集合空间信息)
2.内卷可以将权重自适应地分配到不同的位置,从而对空间域中信息量最大的视觉元素进行优先级排序。(本来的卷积在空间的每一个地方都是用到同一个卷积核,用的同一套权重)
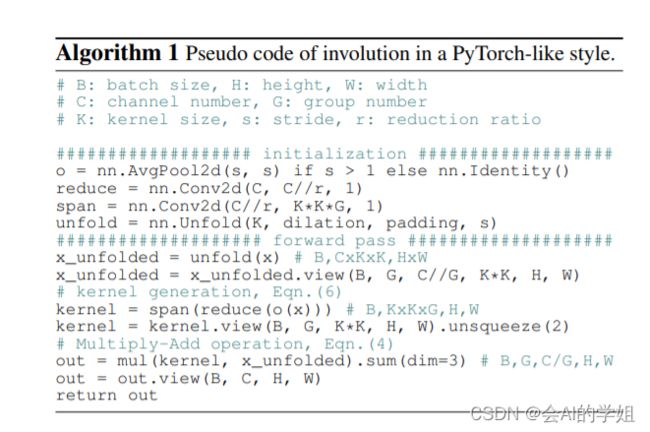
重新考虑了视觉任务标准卷积的固有原理,特别是与空间无关和特定于通道的方法。取而代之的是,我们通过反转前述的卷积设计原理(称为卷积)提出了一种用于深度神经网络的新颖atomic操作。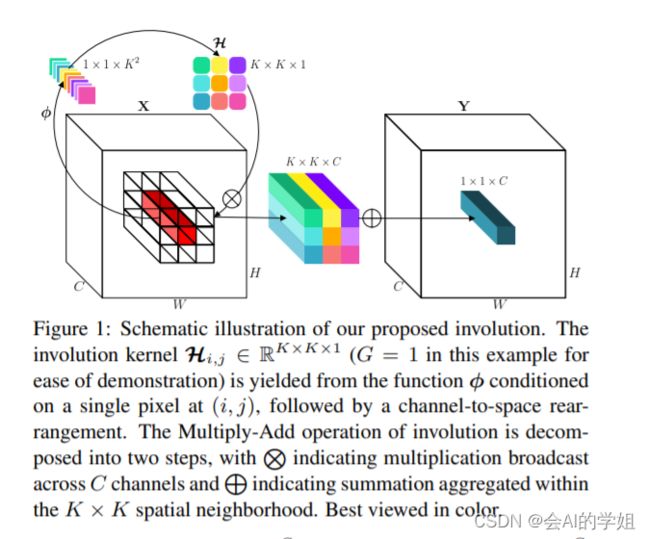
2.3 多头检测器
在进行目标检测时,小目标会出现漏检或检测效果不佳等问题。YOLOv8有3个检测头,能够多尺度对目标进行检测,但对微小目标检测可能存在检测能力不佳的现象,因此添加一个微小物体的检测头,能够大量涨点,map提升明显;
源码:YOLOv8改进:复现HIC-YOLOv5,助力小目标检测-CSDN博客
3.训练可视化分析
mAP50从原始的0.745提升至0.802
YOLOv8_HIC-YOLOv8 summary (fused): 221 layers, 3004550 parameters, 0 gradients, 12.2 GFLOPs
Class Images Instances Box(P R mAP50 mAP50-95): 100%|██████████| 19/19 [00:12<00:00, 1.49it/s]
all 582 6970 0.816 0.711 0.775 0.407训练结果如下:
PR_curve.png
PR曲线中的P代表的是precision(精准率),R代表的是recall(召回率),其代表的是精准率与召回率的关系。
