Linux编程——进程间通信(信号灯集、消息队列)
目录
- 一、信号灯集
-
- 1.1 概念
- 1.2 信号灯集创建步骤⭐⭐⭐
- 1.3 信号灯集对应函数
- 1.4 练习
- 二、消息队列
-
- 2.1 特点
- 2.2 消息队列的创建步骤
- 2.3 函数
- 2.4 练习
一、信号灯集
1.1 概念
信号灯(semaphore),也叫信号量。它是不同进程间或一个给定进程内部不同线程间同步的机制;System V的信号灯是一个或者多个信号灯的一个集合。其中的每一个都是单独的计数信号灯。而Posix信号灯指的是单个计数信号灯。
通过信号灯集实现共享内存的同步操作。
1.2 信号灯集创建步骤⭐⭐⭐
- 创建key值 ftok
- 创建或打开信号灯集 semget
- 初始化信号灯:semctl
- PV操作:semop
- 删除信号灯集 :semctl
1.3 信号灯集对应函数
-
semget
int semget(key_t key, int nsems, int semflg);- 功能:创建/打开信号灯
- 参数:
- key:ftok产生的key值
- nsems:信号灯集中包含的信号灯数目
- semflg:信号灯集的访问权限,通常为
IPC_CREAT | IPC_EXCL |0666
- 返回值:
- 成功:信号灯集ID
- 失败:-1
例:创建或打开信号灯集 ↓

运行:

注意:由于系统原因,第一次创建信号灯集,semid为0,不能用,要排除。故第一次创建完之后要删除semid为0的信号灯集,重新创建。
→查看系统当前信号灯集:ipcs -s
→删除系统信号灯集:ipcrm -s semid -
semctl
int semctl ( int semid, int semnum, int cmd…/*union semun arg*/);- 功能:信号灯集合的控制(初始化/删除)
- 参数:
- semid:信号灯集ID
- semnum: 要操作的集合中的信号灯编号
- cmd:信号灯集的控制方式
- GETVAL:获取信号灯的值,返回值是获得值
- SETVAL:设置信号灯的值(初始化信号灯),需要用到第四个参数:共用体
- IPC_RMID:从系统中删除信号灯集合(如有多个信号灯,最后只删除任意一个信号灯即可将所有的信号灯删除)
- 返回值:成功 0;失败 -1
用法:第四个参数是一个共用体,需自己创建,共用体第一个参数就是信号灯的初值

一般,该共用体只用到第一个成员变量,信号灯集的初始化代码可如下:
union semun{
int val;
}mysemun;
mysemun.val = 10;
semctl(semid, 0, SETVAL, mysemun);
-
semop
int semop (int semid, struct sembuf *opsptr, size_t nops);- 功能:对信号灯集合中的信号量进行PV操作
- 参数:
- semid:信号灯集ID
- opsptr:操作方式,注意是一个结构体指针
- nops: 要操作的信号灯的个数1个
- 返回值:成功 :0;失败:-1
struct sembuf结构体成员:
struct sembuf {
short sem_num; // 要操作的信号灯的编号
short sem_op;
// 0 : 等待,直到信号灯的值变成0
// 1 : 释放资源,V操作
//-1 : 申请资源,P操作
short sem_flg;
// 0(阻塞),IPC_NOWAIT, SEM_UNDO
};
例:信号灯创建整个流程
#include - 对部分信号灯集创建步骤进程简单 函数封装
将信号灯集的初始化和PV操作进行函数的封装,目的是为了代码结构的模块化,使得代码不显得过于啰嗦,对于部分操作的代码实现只需要一次编写便可以对此调用,减少代码编写的重复工作。
#include 1.4 练习
两个进程实现通信(分文件编写),一个进程循环从终端输入,另一个进程循环打印,输入一次打印一次,当输入quit时结束。封装函数,使用用共享内存加信号灯集实现。
/***input.c***/
#include /***output.c***/
#include 二、消息队列
2.1 特点
- 消息队列是IPC对象的一种
- 消息队列由消息队列ID来唯一标识
- 消息队列就是一个消息的列表。用户可以在消息队列中添加消息、读取消息等。
- 消息队列可以按照类型来发送(添加)/接收(读取)消息
2.2 消息队列的创建步骤
- 创建key值 ftok
- 创建或打开消息队列 msgget
- 添加消息:按照类型将消息添加到已打开的消息队列的末尾 msgsnd
- 读取消息:可以按照类型将消息从消息队列中读走 msgrcv
- 删除消息队列 msgctl
2.3 函数
-
msgget
int msgget(key_t key, int flag);- 功能:创建或打开一个消息队列
- 参数:
- key值
- flag:创建消息队列的权限IPC_CREAT|IPC_EXCL|0666
- 返回值:成功:msgid;失败:-1
-
msgsnd
int msgsnd(int msqid, const void *msgp, size_t size, int flag);- 功能:往消息队列中添加消息
- 参数:
- msqid:消息队列的ID
- msgp:指向消息的指针,指向一个消息结构体(需自己创建)

→常用消息结构msgbuf如下:
struct msgbuf{
long mtype; //消息类型
char mtext[N] //消息正文
}; - size:发送的消息正文的字节数(即除了结构体消息类型的剩余大小)。
- flag:
- IPC_NOWAIT消息没有发送完成函数也会立即返回
- 0:直到发送完成函数才返回
- 返回值:成功:0;失败:-1
使用:msgsnd(msgid, &msg,sizeof(msg)-sizeof(long), 0)
注意:消息结构除了第一个成员必须为long类型外,其他成员可以根据应用的需求自行定义。
-
msgrcv
int msgrcv(int msgid, void* msgp, size_t size, long msgtype, int flag);- 功能:读取消息
- 参数:
- msgid:消息队列的ID
- msgp:存放读取消息的空间
- size:接受的消息正文的字节数
- msgtype:
- 0:接收消息队列中第一个消息。
- >0:接收消息队列中第一个类型为msgtyp的消息.
- <0:接收消息队列中类型值不小于msgtyp的绝对值且类型值又最小的消息。
- flag:
- 0:若无消息函数会一直阻塞
- IPC_NOWAIT:若没有消息,进程会立即返回ENOMSG
- 返回值:成功:接收到的消息的长度;失败:-1
-
msgctl
int msgctl ( int msgqid, int cmd, struct msqid_ds *buf );- 功能:对消息队列的操作,删除消息队列
- 参数:
- msqid:消息队列的队列ID
- cmd:
- IPC_STAT:读取消息队列的属性,并将其保存在buf指向的缓冲区中。
- IPC_SET:设置消息队列的属性。这个值取自 buf参数。
- IPC_RMID:从系统中删除消息队列。
- buf:消息队列缓冲区
- 返回值:成功:0;失败:-1
用法:要删除消息队列就用→ msgctl(msgid, IPC_RMID, NULL)
2.4 练习
-
单个消息读取


若将msgrcv的倒数第二个参数msgtype改为0,也可以打印出类型1的消息,原因是msgrcv中msgtype为0时,可以匹配任意类型消息,且默认读取消息队列中第一个消息(更改后的代码如下图所示)。

-
多个消息读取
即,添加多个消息类型,进程按类别发送,各取所需。
需要修改的代码如下:

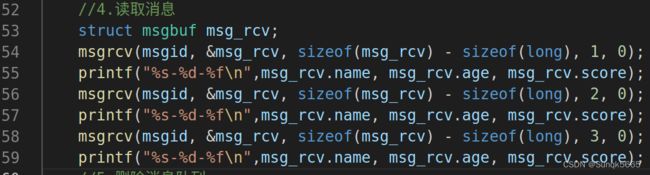
运行结果:

从运行结果可以看出,发出的类型1和类型2消息已被接收,由于程序中并没有发送类型3消息,所以在接收3类型消息时程序会发生阻塞。
当然,上面代码示例是在一个进程中实现的消息接收发送的功能,只是为了函数的简单使用,最重要的韩还是进程间的通信。
消息队列不同于管道,通信的两个进程可以是完全无关的进程,它们之间不需要约定同步的方法。只要消息队列存在并且有存放消息的空间,发送进程就可以向队列中存放消息,并且可以在接收进程开始之前终止其执行。但使用管道通信的进程,不论是匿名管道还是有名管道,通信的两个进程都必须是正在运行的进程。这一点正是消息队列的优点。