ROS通信机制——python实现
一、普通话题通信
1. 创建发布者
注意:不要在开头添加注释,下面代码第一行是指定编译器,第二行是防止因为代码中的中文注释而出现乱码
#! /usr/bin/env python
#coding:utf-8
#导包
import rospy
from std_msgs.msg import String
if __name__=="__main__":
#初始化ROS节点
rospy.init_node("talker")
#创建发布者
pub=rospy.Publisher("Matlab",String,queue_size=10)
#创建消息类型
msg=String()
#设置发布排频率
rate=rospy.Rate(1)
count=0
#休眠1秒,防止出现前面的数据没有接受到
rospy.sleep(1)
#循环发布数据,其中rospy.is_shutdown()的意思是只要节点关闭就返回true
while not rospy.is_shutdown():
count+=1
#str(count)可以将count转变为字符串
msg.data="hello"+str(count)
pub.publish(msg)
#rospy.loginfo()相当于C++版本里面的ROS_INFO()
rospy.loginfo("I talk %s",msg.data)
#休眠
rate.sleep()
2. 创建订阅者
注意:不要在开头添加注释,下面代码第一行是指定编译器,第二行是防止因为代码中的中文注释而出现乱码
#! /usr/bin/env python
#coding:utf-8
#导包
import rospy
from std_msgs.msg import String
def Callback(msg):
rospy.loginfo("I hear %s",msg.data)
if __name__=="__main__":
#初始化ROS节点
rospy.init_node("listener")
#创建订阅者
sub=rospy.Subscriber("Matlab",String,Callback,queue_size=10)
#回调函数
#spin
rospy.spin()3.添加可执行权限
注意:一定要在scripts文件夹下打开终端

4. 编译配置
在Cmakelist中添加如下代码:

catkin_install_python(PROGRAMS
scripts/talker.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
catkin_install_python(PROGRAMS
scripts/listener.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)5. 执行

二、自定义话题通信
1. 准备工作
先写好自定义的消息,然后再编译,这时会生成相应的头文件。
打开lib下面的python2.7/dist-package....,鼠标放在这个文件上然后打开终端。

在终端中输入pwd,然后赋值路径

将路径赋值到setting.json中的“python.autoComplete.extraPaths” 中,保存。
2. 编写发布者
#! /usr/bin/env python
#coding:utf-8
#导包
import rospy
from learning_communication.msg import person
if __name__ == "__main__":
#初始化节点
rospy.init_node("talkermsg")
#创建发布者
pub=rospy.Publisher("Matlab",person,queue_size=10)
#创建消息对象
per=person()
per.age=10
per.name="zhangpeng"
per.height=180
#设置频率
rate=rospy.Rate(1)
while not rospy.is_shutdown():
pub.publish(per)
rospy.loginfo("I am talking %s %d %d",per.name,per.age,per.height)
per.age+=1
rate.sleep()
3. 编写接收者
#! /usr/bin/env python
#coding:utf-8
import rospy
from learning_communication.msg import person
def Callback(per):
rospy.loginfo("I hear %s %d %d",per.name,per.age,per.height)
if __name__ == "__main__":
rospy.init_node("listenermsg")
sub=rospy.Subscriber("Matlab",person,Callback,queue_size=10)
rospy.spin()
4. 配置相关的文件
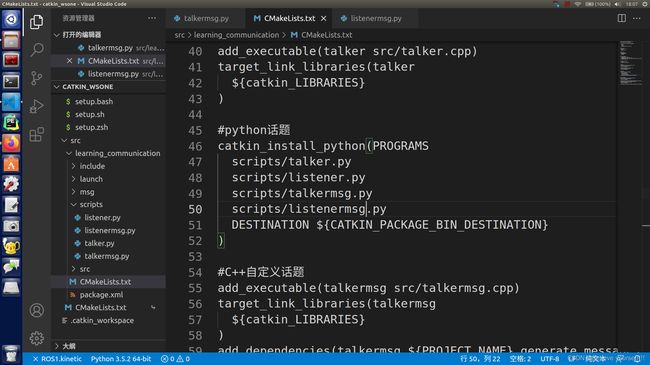
在CmakeList中添加:
catkin_install_python(PROGRAMS
scripts/talker.py
scripts/listener.py
scripts/talkermsg.py
scripts/listenermsg.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
5. 添加可执行权限
注意:一定要在scripts文件夹下打开终端
6. 编译运行
