ubuntu 22 cross compile OpenCV 4.8 for RK3588
1 down load opencv 4.8
https://opencv.org/releases/
2 mkdir build && cd build
mkdir build
cd build/
![]()
3 cmake …
sudo cmake .. -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=../install -D ENABLE_FAST_MATH=1 -D WITH_OPENCL=ON -D WITH_IPP=OFF -D ITH_GTK=ON -D WITH_GTK3=ON -D BUILD_SHARED_LIBS=OFF -D CMAKE_C_COMPILER=/home/jeffrey/360/host/bin/aarch64-buildroot-linux-gnu-gcc -D CMAKE_CXX_COMPILER=/home/jeffrey/360/host/bin/aarch64-buildroot-linux-gnu-g++
4 make -j12
make -j12
---------------------------------------remap ocl -------------------------------------------------------------
1 main
#include 2 log
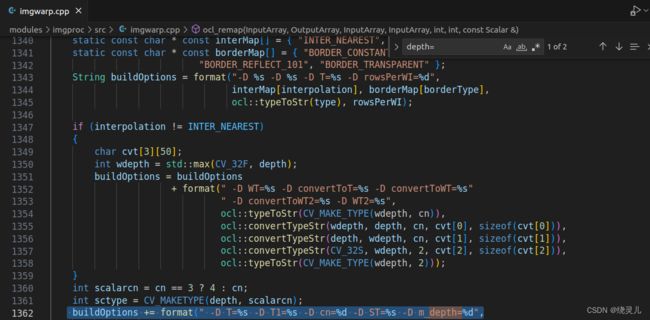
Status -11: CL_BUILD_PROGRAM_FAILURE
-D INTER_LINEAR -D BORDER_CONSTANT -D T=uchar -D rowsPerWI=1 -D WT=float -D convertToT=convert_uchar_sat_rte -D convertToWT=convert_float -D convertToWT2=convert_float2 -D WT2=float2 -D T=uchar -D T1=uchar -D cn=1 -D ST=uchar -D depth=0
:175:9: error: expected member name or ‘;’ after declaration specifiers
int32_t depth; /**< The image depth. */
^
:14:15: note: expanded from here
#define depth 0
^
:175:8: error: expected ‘;’ at end of declaration list
int32_t depth; /**< The image depth. */
^
error: Compiler frontend failed (error code 62)
3 how to resolve
change depth in line 1362 to m_depth