图解通信原理与案例分析-28:四大全球卫星导航系统GNSS的基本原理与技术对比---中国的北斗、美国的GPS、欧洲的伽利略、俄罗斯的格洛纳斯
前言:
卫星导航是卫星通信的一个重要的分支,它是利用导航卫星通信进行测时(时间)和测距(定位)的广义的卫星通信系统。
本文将介绍全球卫星导航系统GNSS的基本原理, 以及对全球现有的4大导航卫星系统进行全方位的比较。
关于卫星通信的基本知识,请参看《图解通信原理与案例分析-27: 卫星通信系统及关键技术》CSDN。
本文的重点讲放在卫星导授时与测距上,介绍卫星导航系统的基本原理以及对全球现有的4大导航卫星系统进行全方位的比较。
目录
第1章 导航卫星系统GNSS概述
1.1 什么是卫星导航?
1.3 卫星导航的应用
第2章 导航卫星系统的组成
2.1 导航卫星系统的网络架构组成(以GPS为例)
2.2 GPS卫星系统组成与原子钟(以GPS为例)
2.3 导航终端的基本组成(以GPS为例)
2.4 GNSS通信的频谱
第3章 GNSS接收机微波通信的基本原理
3.1 基带调制技术
3.2 多址技术
3.3 定位方式与伪码类型
3.4 GPS导航电文
4. GNSS接收机定时、定位的基本原理
4.1 测时t
4.2 测距
4.3 定位(x,y,z)
4.4 GPS导航的基本原理
5. 全球4大导航卫星系统比较
第1章 导航卫星系统GNSS概述
1.1 什么是卫星导航?

卫星导航是卫星通信的一个重要的分支,它是利用导航卫星通信进行测时(时间)和测距(定位)的广义的卫星通信系统。
这里面有几个关键词:测时与测距。
测时:又称授时或定时,用户接收机获取自身精确的时间称为“测时”,“测时”的功能。在2G/3G/4G/5G等蜂窝移动通信系统中,作为时钟同步源,得到了广泛的应用,“测时”的前提是卫星通信。
测距:精确地测量接收机到卫星的距离,它利用的是电磁波的传播速度与传播时间的乘积获取传输路径的距离的,因此测距的前提是“测时”。
定位:就是确定接收机在地球上的方位,卫星导航系统是利用接收机到多个不同卫星的距离来计算定位目标在地球上的方位的 ,因此,定位的前提是“测距”。
导航:导航是接收机从一个地方移动到另一个地方的过程,只有能够精确的源地和目的地,才能进行正确的导航,因此导航的前提是定位。
1.2 四全球导航卫星系统GNSS(Global Navigation Satellite System)

在导航卫星系统领域,国际上有一个超豪华俱乐部,它只有四个会员,却吸引了各国政府的关注和众多顶级科学家、工程师的研究,这个俱乐部就是GNSS(全球导航卫星系统)。
四个会员分别是:美国GPS、俄罗斯格洛纳斯GLONASS、欧洲伽利略GALILEO、和中国北斗COMPASS。
最早出现的是美国的GPS导航系统,
其实俄罗斯格洛纳斯GLONASS,
然后是欧洲伽利略GALILEO,
最迟出现的中国北斗COMPASS,
实际上,后面三个导航系统的建立时间,虽然有先后,但时间相差不远。
除了上述4大全球系统外,还包括区域系统和增强系统,其中区域系统有日本的QZSS和印度的IRNSS。
增强系统有美国的WAAS、日本的MSAS、欧盟的EGNOS、印度的GAGAN以及尼日尼亚的NIG-GOMSAT-1等。
未来几年,卫星导航系统将进入一个全新的阶段。用户将面临4大全球系统近百颗导航卫星并存且相互兼容的局面。
丰富的导航信息可以提高卫星导航用户的可用性、精确性、完备 性以及可靠性,但与此同时也得面对频率资源竞争、卫星导航市场竞争、时间频率主导权竞争以及兼容和互操作争论等诸多问题
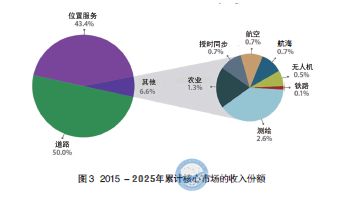
1.3 卫星导航的应用

- 授时:作为时间同步装置,在通信网络中广泛的应用。
- 通信:蜂窝移动通信系统需要依赖GPS提供精确的定时。
- 航空:飞行导航与着陆导航。
- 航海:卫星导航接收机广泛地用于海上行驶的各类船只航线,也可以用于沿岸与进港,以及内河行驶的船只,精度可达到2-3m。在卫星导航接收机与无线通信手段集成后,该系统便成为一个位置报告系统和紧急救援系统。许多渔船将GPS与雷达和鱼探器结合在一起,产生明显的经济效益。
- 人员跟踪:个人跟踪的应用需求与E911这类导航手机或称定位手机思路相似,但其产品类型和主要功能定位则与它们大相径庭。首先要求其体积和功耗要小,便于隐藏或佩带,如手表之类。其应用功能可以由中心加以激活或启动,以利于获取佩带者所在位置。
- 消费娱乐:徒步旅行者、猎人、越野滑雪者,野外工作人员和户外活动者年常应用袋式GPS定位器,配上电子地图,可以在草原、大漠、乡间、山野或无人区内找到自己的目的地。
- 测绘:GPS测绘还可用于绘图、地藉测量、地球板块测量、火山活动监测、GIS领域、大桥监测、水坝监测、滑坡监测、大型建筑物监测等。这种测量技术的实时动态化(RTK)可以用于海洋河道公路测量,以及矿山、大型工程建设工地等作为自动化管理和机械控制。
- 车辆监控管理:
- 汽车导航与信息服务
第2章 导航卫星系统的组成
2.1 导航卫星系统的网络架构组成(以GPS为例)
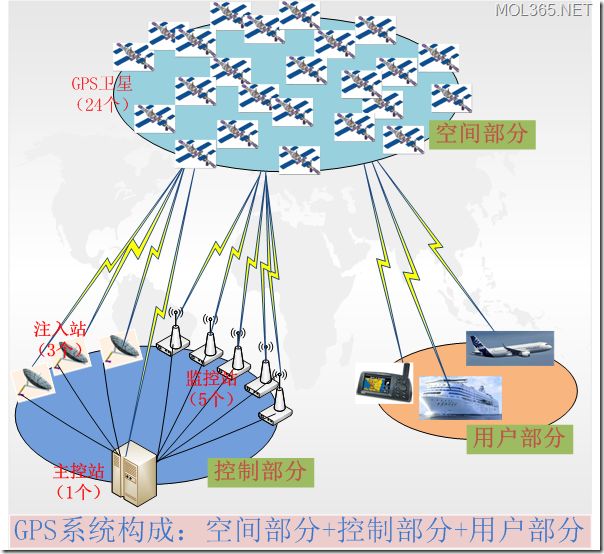
以GPS卫星导航系统为例,导航卫星系统由三部分组成:
(1)空间(段)部分
由多颗导航卫星构成空间导航网,不同国家的导航系统,卫星的数目是不相同的,且卫星的数目也是变化的,更多的卫星会导致更好的覆盖。
GPS的空间部分,由24颗卫星组成(21颗工作卫星;3颗备用卫星),它位于距地表20200km的上空,运行周期为12h。
卫星均匀分布在6个轨道面上(每个轨道面4颗),轨道倾角为55°。
卫星的分布使得在全球任何地方、任何时间都可观测到4 颗以上的卫星,并能在卫星中预存导航信息,GPS的卫星因为大气摩擦等问题,随着时间的推移,导航精度会逐渐降低。
为保证系统的连续运行,一般在每个轨道上还部署一颗备份卫星,一旦有卫星发生故障,则可以立即替代。
卫星之间并不直接通信,他们都直接与地面监控部分通信。
(2)地面监控(段)部分
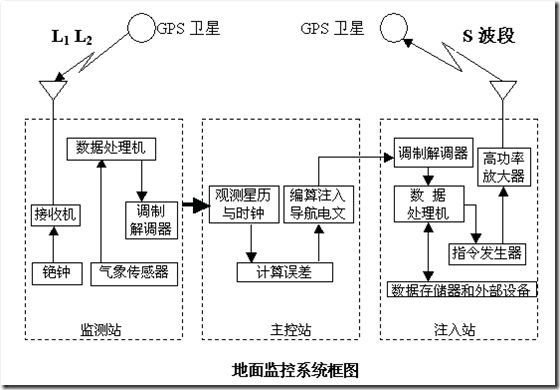
地面控制系统由主控制站(Master Monitor Station)、监测站(Monitor Station)、注入站(Ground Antenna)所组成,
GPS控制部分由1个主控站,5个检测站和3个注入站组成。
组成:GPS控制部分=主控站(1个)+监测站(5个)+注入站(3个)
作用:监测和控制卫星运行,编算卫星星历(导航电文),保持系统时间。
- 主控站:从各个监控站收集卫星数据,计算出卫星的星历和时钟修正参数等,并通过注入站注入卫星;向卫星发布指令,控制卫星,当卫星出现故障时,调度备用卫星。
- 监控站:接收卫星信号,检测卫星运行状态,收集天气数据,并将这些信息传送给主控站。
- 注入站:将主控站计算的卫星星历及时钟修正参数等注入到卫星。 即向卫星发送发送控制命令。
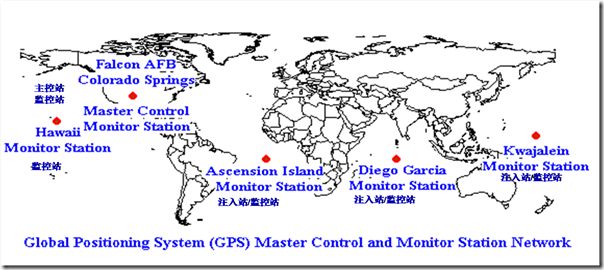
分布情况:
- 主控站:位于美国科罗拉多州(Calorado)的法尔孔(Falcon)空军基地。
- 注入站:大西洋的阿松森群岛(Ascendion);印度洋的迭戈加西亚(Diego Garcia);东太平洋的卡瓦加兰(Kwajalein)。
- 监控站:1个与主控站在一起;3个与注入站在一起;另外一个在夏威夷(Hawaii),西太平洋。
(3)用户(段)部分
用户设备部分通常由接收机、定时器、数据预处理器、计算机和显示器等组成。
其主要功能是能够捕获到卫星信号,并跟踪这些卫星的运行。
当接收机捕获到跟踪的卫星信号后,即可测量出接收天线至卫星的伪距离和距离的变化率,,解调出卫星轨道参数等数据。
根据这些数据,接收机中的微处理计算机就可按定位解算方法进行定位计算,计算出用户所在地理位置的经纬度、高度、速度、时间等信息。
它接收卫星发来的微弱信号,从中解调并译出卫星轨道参数和定时信息等,同时测出导航参数(距离、距离差和距离变化率等),再由计算机算出用户的位置坐标(二维坐标或三维坐标)和速度矢量分量。
卫星信号接收机有各种类型:
- 有用于航天、航空、航海的机载导航型接收机,
- 也有用于测定定位的测量型接收机,
- 也有普通大众使用的车载、手持型接收机。
- 接收设备也可嵌入到其他设备中构成组合型导航定位设备,如导航手机、导航相机等。
2.2 GPS卫星系统组成与原子钟(以GPS为例)

GPS之所以能够提供精准的定时,离不开安装在GPS卫星上的原子钟。
原子钟:
是一种计时装置,它最初是由物理学家创造出来用于探索宇宙本质的,目前世界上最准确的计时工具就是原子钟。
人们平时所用的钟表,精度高的大约每年会有1分钟的误差,这对日常生活是没有影响的,但在要求很高的生产、科研中就需要更准确的计时工具。
原子钟是利用原子吸收或释放能量时发出的电磁波来计时的。
由于这种电磁波非常稳定,再加上利用一系列精密的仪器进行控制,原子钟的计时就可以非常准确了。
现在用在原子钟里的元素有氢(Hydrogen)、铯(Cesium)、铷(rubidium)等。原子钟的精度可以达到每2000万年才误差1秒。这为天文、航海、宇宙航行提供了强有力的保障。

根据原子物理学的基本原理,原子是按照不同电子排列顺序的能量差,也就是围绕在原子核周围不同电子层的能量差,来吸收或释放电磁能量的。这里电磁能量是不连续的。当原子从一个“能量态”跃迁至低的“能量态”时,它便会释放电磁波。这种电磁波特征频率是不连续的,这也就是人们所说的共振频率。同一种原子的共振频率是一定的,例如铯133的共振频率为9 192 631 770Hz。因此铯原子便用作一种节拍器来保持高度精确的时间。

2.3 导航终端的基本组成(以GPS为例)

2.3.1 GPS信号射频接收端模块(射频)
(1)接收机天线

接收机天线部分由天线和前置放大器组成。天线的作用是将GPS卫星信号的极微弱的电磁波转化为相应的电流;
(2)前置放大器LNA
其作用则是将微弱的GPS信号电流进行相应放大。
(3)变频器/混频器/射频解调器
经过GPS前置放大器的信号仍然很微弱,为了使接收机通道得到稳定的高增益,并且使L频段的射频信号变成低频信号,需要通过变频器/混频器/射频解调器。
(4)ADC模数转换
把模拟信号转换成数字信号。
2.3.2 GPS基带信号处理模块(专用处理器)
(1)多信号通道:
信号通道是GPS接收机的核心部分,GPS信号通道是硬软件结合的电路,不同类型的接收机其通道是不同的,通道的数量,表明接收机能够同时处理的GPS卫星信号的最大数量。
GPS信号通道具有以下作用。
- 搜索卫星,牵引并跟踪卫星。
- 对广播电文数据信号实行解扩,解调出广播电文。
- 进行伪距测量、载波相位测量及多普勒频移测量。
由于接收机接收到的信号是扩频的调制信号,所以要经过解扩、解调才能得到导航电文。
2.3.3 应用处理模块(通用处理器: GPS定位算法)
(1)存储器:
接收机内设有存储器或存储卡,以存储卫星星历、卫星历书、接收机采集到的码相位伪距观测值、载波相位观测值及多普勒频移。
目前GPS接收机都装有半导体存储器(简称内存),接收机内存数据可以通过数据口传到微机上,以便进行数据处理和数据保存。
在存储器内还装有多种工作软件,如自测试软件、卫星预报软件、导航电文解码软件、GPS单点定位软件等。
(2)微处理器CPU
- 接收机开机后,立即指示各个通道进行自检,实时地在视屏显示窗内展示各自的自检结果,并测定、校正和存储各个通道的时延值。
- 接收机对卫星进行捕捉跟踪后,根据跟踪环路所输出的数据码,解译出GPS卫星星历。当同时锁定4颗卫星时,将C/A码伪距观测值连同星历一起计算出测站的三维位置,并按照预置的位置数据更新率,不断地更新(计算)点的坐标。
- 用己测得的点位坐标和GPS卫星历书,计算所有在轨卫星的升降时间、方位和高度角,并为作业人员提供在视卫星数量及其工作状况,以便选用"健康”的且分布适宜的定位卫星,达到提高点位精度的目的。
- 接收用户输入的信号,如测站名、测站号、天线高和气象参数等。
(3)电源
GPS接收机的电源包括内电源和外接电源。
内电源:采用锂电池,主要用于RAM存储器供电,以防止数据丢失。
外接电源:一般采用汽车电瓶或者随机配备的专用电源适配器。当用交流电时,要经过稳定电源或专用电流交换器。
(4)IO设备
Uart串行接口,用于外部系统与GPS接收机进行通信
(5)秒脉冲1PPS输出(未画出)
提供精确的定时信号1PPS
2.4 GNSS通信的频谱
(1)微波是通信的频谱
(2)GNSS的频谱
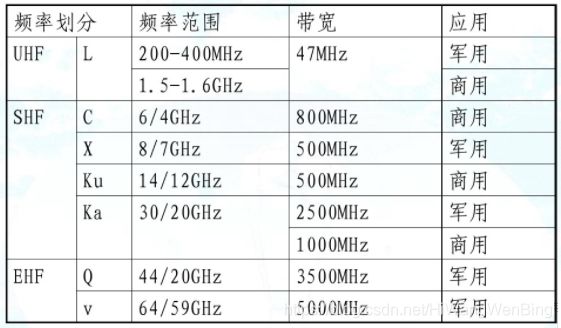
这些卫星导航系统所用的载波无线电信号都属于特高频(300MHz-3GHz)。


从上图可看出:
- 不同的卫星导航系统,其载波频谱大部分是隔开的。
- 部分频谱也是会被不同的卫星导航系统共享。如GPS L5与GAL E5s共享频谱,北斗B2与GAL E5b共享频谱, GPS L1与 GAL共享频谱。而俄罗斯的GLO L1是独立的频谱。
第3章 GNSS接收机微波通信的基本原理
这里是指GPS接收机是如何通过GPS信号获取GPS“导航电文”信息的。

3.1 基带调制技术
(1)多进制调制相位调制nPSK
- 星座图

BPSK (Binary Phase Shift Keying):二进制相移键控。
QPSK (Quadrature Phase Shift Keying):四进制相位调制。
- 原理图

IQ调制技术:通过控制I路和Q路的幅度,最终控制调制信号相位。
- 波形图


(2)最小频移键控MSK (Minimum Shift Keying)

在数字调制中,最小频移键控是一种连续相位的频移键控方式。
最小频移键控MSK在频率的切换过程中,向好的相位保持不变,不会发生相位的跳变!
3.2 多址技术
在卫星导航系统中,主要使用两种多址技术。GPS,BD,Galileo都是使用CDMA码分多址,GLONASS使用FDMA频分多址。
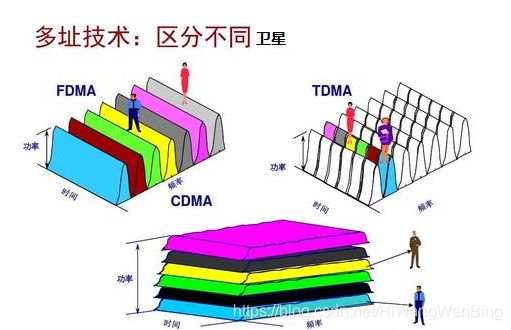
(1)频分多址FDMA: GLONASS
关于频分多址(FDMA),详情可以参考:《图解通信原理与案例分析-14:“大哥大”与1G模拟蜂窝移动通信案例--频率调制与频分多址FDMA》
图解通信原理与案例分析-14:“大哥大”与1G模拟蜂窝移动通信案例--频率调制与频分多址FDMA_文火冰糖的硅基工坊的博客-CSDN博客_大哥大频率
(2)码分多址CDMA:其他
关于码分多址(CDMA),详情可以参考:《图解通信原理与案例分析-19:3G CDMA码分多址通信技术原理---码分多址、OVSF正交扩频码、伪随机码序列》
图解通信原理与案例分析-19:3G CDMA码分多址通信技术原理---码分多址、OVSF正交扩频码、伪随机码序列_文火冰糖的硅基工坊的博客-CSDN博客
对于接收机来说,多个卫星信号同时到达,需要用多址技术来区别不同的卫星。
以GPS为例,卫星导航系统,可以看成一个基于码分多址(CDMA)的扩频通信系统,其中的码为伪码。
伪码中一个二进制数称为一个码片/码元,一个码片持续的时间成为码宽
 ,码宽的倒数为码率。
,码宽的倒数为码率。
3.3 定位方式与伪码类型
GPS提供两种定位服务方式:标准定位服务(SPS)和精密定位服务(PPS)。
两种方式的区别在于调制载波信号的扩频码不同,分别对应
- 标准定位服务(SPS):粗码(Coarse/Acquisition Code),又称C/A码。
- 精密定位服务(PPS) :精码(Precise Code),又称P码。
C/A码和P码都是一种伪码,
L1:载波调制采用C/A码和P码,码元速率为1.023MHz。L1C/A精度仅为300米
L2:载波调制只采用P码。
L5:载波调制,码元速率为10.23MHz,L5的测距精度可达30米。
3.4 GPS导航电文
(1)GPS导航电文的消息格式

- 一个完整的导航电文包括25页, 共25 * 1500,需12.5分钟传输完成。
- 一个完整的页或帧包含5个子页,共5 * 300, 需30秒时间传输完成。
- 一个完整的子页包含10个字, 共10 * 30, 需6秒钟时间完成传输。
- 一个完整的字包含30位。
- 每子页开头是遥测字(Telemetry Word,TLM)和转换字(HandoverWord,HOD)
(2)GPS导航电文内容更新的周期
(3)GPS导航电文内容发送的周期
至此,GPS接收机可以周期性的从天空中的卫星中解调出卫星发过来的数据:
- 卫星的位置信息:根据此信息,能够计算获得卫星在空间中坐标(Xn,Yn,Zn)
- 卫星的时间信息:发送卫星位置信息时的绝对时间Tn
4. GNSS接收机定时、定位的基本原理
用户接收机有4个未知数:经度,纬度,高度,本地绝对时间,即(x,y,z,t)这4个未知参数。
4.1 测时t:
假设用户接收机自身的精确为t。测时的过程,就是计算t的过程。测时的过程与定位的过程是一起进行的!
4.2 测距:
测距,就是精确的测量用户接收机到指定卫星的距离,有两种方法:
(1)速度和时间的行程公式:
![]() ; v为已知的电磁波的传播速度3*10^8米,t为未知的电磁波的传播时间。
; v为已知的电磁波的传播速度3*10^8米,t为未知的电磁波的传播时间。
(2)空间中任意两点的距离公式:
在空间中两个任意两点(x1,y1,z1), (x2, y2, z2)的坐标已知的情况下,空间中任意两点的距离为
![]()
4.3 定位(x,y,z)
假设用户接收机的定位信息为(x,y,z),定位的的过程,就是计算(x,y,z)的过程。测时的过程与定位的过程是一起进行的!
定位,就是确定用户接收机在地球上的精确的方位,卫星导航系统是利用用户接收机到多个不同卫星的距离来计算定位目标在地球上的方位的 ,因此,定位的前提是“测距”。
(1)一次定时、定位
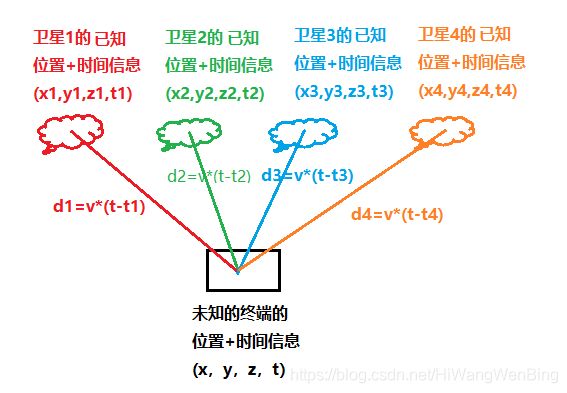
用户接收机有4个未知数:经度,纬度,高度,本地绝对时间,即(x,y,z,t)这4个未知参数。
那么,通过4颗卫星,得到一个四元方程组,就可以完成了一次测时,得到t和一次定位,得到(x,y,z)的值.
![]()
![]()
![]()
![]()
上述是4个未知数(x,y,z,t)的方程组,只要4个卫星的定时和定位信息(x1,y1,z1, t1), (x2,y2,z2, t2),(x3,y3,z3, t3),(x4,y4,z4, t4)是已知的,那么上述方程组就有解。
那么卫星自身的定时和定位信息是哪里来的呢?
这是通过GPS导航电文消息获取的!这也是GPS导航电文消息的价值所在。
从上述可以看出:
- 如果要进行三维空间的定时和定位,至少需要4颗卫星。
- 如果要进行二维平面的定时和定位,至少需要3颗卫星。(忽略高度)
- 时间这个维度是不能被忽略的,定位的前提是定时!
(2)增加定时定位的精度的方法1(时间维度):多次定时、定位
通过收集同一组4颗卫星不同时间点的定时和定位信息,多次求解方程组,得到多组定时、定位信息,再进一步求平均,就可增加定时、定位的精度。
(3)增加定时定位的精度的方法2(空间维度):多组卫星定时、定位
通过收集N>4颗卫星的不同4颗卫星的同一时间点的定时和定位信息,多次求解方程组,得到多组定时、定位信息,再进一步求平均,就可增加定时定位的精度。
比如收到5颗卫星的数据,从中选出任意的4颗卫星,就可以获取一次定时定位信息,一共有5种组合。
比如收到6颗卫星的数据,从中选出任意的4颗卫星,就可以获取一次定时定位信息,一共有15种组合。
(4)精确定时、定位
同时考虑时间维度和空间维度,得到最终精确的定时、定位信息。
至此,用户接收机就可以精确的进行定时和定位了。
4.4 GPS导航的基本原理

导航:
根据接收机实时的定位信息,按照指定的地图,把用户从当前定位地点,引导到已知的目的地点的过程。
只有精确的接收机的实时的定位,才能进行正确的导航,因此导航的前提是定位。当然,导航离不开含有位置信息的地图。
地图导航的原理,已经超出了本文的范畴,不再进一步探讨。
5. 全球4大导航卫星系统比较
| 比较项目 | 美国 | 俄罗斯 | 欧洲 | 中国 |
| 名称 | GPS | 格洛纳斯GLONASS | 伽利略GALILEO | 北斗COMPASS |
| 创建时间 | 1958 | 1993 | 1999 | 2000 |
| 运营时间 | 1964 | 2007 | 2014 | 2012 |
| 全部完成时间 | 1994 | 2009 | 2020 | 2020 |
| 卫星数目 | 21+3 | 24+3 | 27+3 | 30+5 |
| 民用定位精度1 | 100米 | NA | NA | 10米 |
| 民用定位精度2 | 10米 | 10米 | 1米 | 2.5-5米 |
| 军用定位精度 | 0.1米 | 1.2米 | NA | 0.05米 |
| 测速精度 | 0.1m/秒 | 0.15/秒 | NA | 0.2米/秒 |
| 定时精度 | 几十纳米 | NA | NA | 10纳秒 |
| 多址方式 | CDMA | FDMA | CDMA | CDMA |
| 基带调制 | BPSK, QPSK, 8PSK | BPSK, QPSK, 8PSK | BPSK, QPSK, 8PSK | BPSK, QPSK, 8PSK |
| 优势 | 卫星多 精度高 |
|||
| 不足 | 普及度不高 |
数据不全,待续。。。。。