图像处理(十三)保刚性图像变形算法-Siggraph 2004
图像变形可以说是很多图像、动画领域的一个非常常见的功能,就说ps、天天P图、美图秀秀、可牛等这些每个软件,有好多个功能都要用到图像变形,比如图像方向校正、图像全景、视频防抖等,在我的另外一篇博文全景矩形还原,就要用到图像变形算法。
变形算法实现图像姿态调整

变形算法实现物体方向位置调整
可以说ps中的一些图像扭曲都是通过变形方法实现的,比如这篇paper:《As-Rigid-As-Possible Image Registration for Hand-drawn Cartoon Animations》就有讲到它的变形算法与ps的效果分析,然而我今天要讲的算法无论是在视屏防抖《Content-Preserving Warps for 3D Video Stabilization》《Bundled Camera Paths for Video Stabilization》,还是在图像全景《Rectangling Panoramic Images via Warping》等都用到这个算法,这几篇都是siggraph上的文献,对于搞图形图像的人来说,siggraph上的paper是每年必看的文章。保相似的变形算法就相当于是一个经典又好用的图像变形算法,具有保相似性,避免图像变形过程中,发生严重错切变换。好了到底是哪篇文献这么好用,那就是2005 siggraph上的一篇文献《As-Rigid-As-Possible Shape Manipulation》,这篇文献在三维网格曲面图形变形方面也具有重要的作用。
好了废话不多说,这里开始讲解《As-Rigid-As-Possible Shape Manipulation》,因为这篇paper分为两个步骤,
第一步主要是实现尽量保证变形前后,每个三角形都于原来的对应三角形相似,又称之为网格模型的保相似变形。
第二步主要是为了尽量保证每个三角形与原三角形尽量全等。由于第一步中算法只是保相似,这样变形后三角形会有的被放大,有的被缩小,出现图像的局部放大与缩小,所以需要对每个三角形进行适合的缩放调整,这一步又称为拟合步,拟合变形后的每个三角形与原网格三角形全等。
一、理论讲解
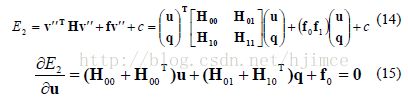
(1)相对坐标的概念。开始这个算法之前,我需要先给讲解一个三角形中相对坐标的概念:给定一个三角形v0v1v2,如下图所示:
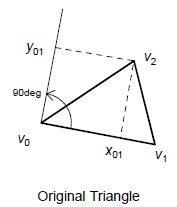
那么我们定义,v2相对于v0、v1的坐标为(x01,y01),满足:

也就是说,我们可以通过已知的一个三角形,然后建立一个以三角形的一个顶点为原点,以其邻接边、及其对应的垂直旋转90度后的方向分别作为x轴、y轴,求取三角形另外一个顶点的相对于这个坐标系的坐标。OK,如果我给你一个三角形,我要你计算出(x01,y01),你要怎么计算?这个是一个简单的数学问题,同时也是本文算法开始的第一步,具体x01、y01怎么计算,那是高中问题了,不解释。
(2)整体保相似。保相似图像变形算法的原理很简单,说白了就是尽量保证变形前后,相对坐标不变,也就是说保证每个三角形的相对坐标(x12,y12)、(x20,y20)、(x01,y01)不变。因为如果两个三角形的这个相对坐标一样,那么这两个三角形就是相似三角形。那么算法具体是怎么实现尽量保证,每个三角形变形前后的这三个相对坐标不变的呢?
假设变形后的三角形顶点坐标为v0',v1',v2'。因为我们是要尽量的保证相对坐标不变,我们可以根据下面的计算公式:

计算出v2desired,然后使得如下误差最小化:
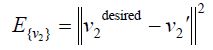
上面的能量公式越小,就代表变形后的三角形与原三角形越相似。而对于有多个三角面片的网格模型,那么总误差能量公式为:

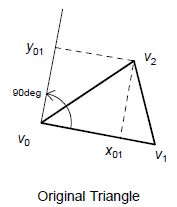
这个问题其实归结为求解一个最小二乘问题,大家还记得吗,最小二乘其实就是使得误差能量最小化,因此到了这里其实我们就可以猜到,这个算法最后归结为求解一个稀疏的线性系统。我们的目的是使得上面的总能量最小化,设相对坐标v'= ,那么:
,那么:

我们的问题是要使得E1{v’}最小化,而最小化说白了就是使得其偏导数为0,因此我们需要对E1{v’}求偏导。开始前先把公式5,换另外一种形式来表达:

其中 ,q表示控制顶点,u表示自由顶点。对上面的式子求偏导:
,q表示控制顶点,u表示自由顶点。对上面的式子求偏导:

把上面的式子简写为:
需要注意的是:对于控制顶点不变的模型,G'、B是一个固定的稀疏矩阵,因此我们可以通过上式求解u,得到自由顶点的坐标。
(3)局部完全保相似,及局部缩放调整。每个三角形分开重新调整,使得其与原三角形更为相似,同时对其做缩放调整。
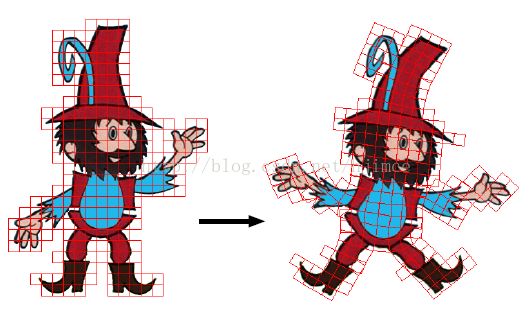
首先,在经过上面的整体相似变换后,三角形可能进行放大或者缩小,因为我们用了三角形的内在属性相对坐标,这样只能保证所有三角形的尽量相似,并不能保证全等。如果算法直到这里就结束了,那么变形后的图像将会出现局部放大与缩小。就拿上面的瘦脸图片来说,如果只经过上面相似变换步骤,我们只是要移动脸型轮廓的特征点,而最后变形出来的结果可能就会出现眼睛等局部位置的放大,或缩小,因此我们要进行大小调整,瘦脸后,眼睛的大小与原来图像的大小相等。
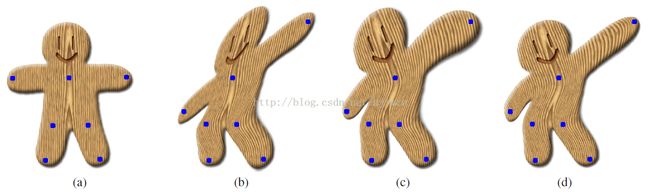
就像上面图像中,图(a)是原图,图(c)的结果就是只经过相似变换后的结果,可以看到(c)中的右手部变粗了许多,而左手部变细了许多,因此我们接着这一步要做的事就是调整大小,使得(a)变形后,使得图像变形后不会出现局部放大与缩小的情况,得到如(d)结果图。
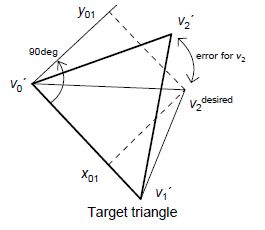
另一方面,在经过上面的整体相似变换后,因为我们用了整个三角网格模型进行整体调整,使得能量最小化,这个就像最小二乘一样,最后求解出来的结果并不能保证每个三角形与原三角形完全相似,也会发生错切变换,误差还是存在的。就像最小二乘,求解出来的结果并不能保证最后每个方程的残差为0。
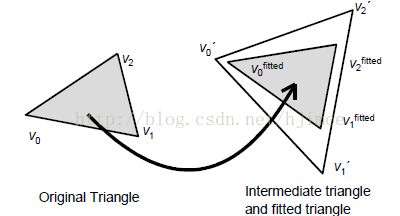
在经过(2)中的相似变换后,因为我们是对网格模型的所有三角形一起调整的,保证总三角形错切变形能最小化,这个时候得到的每个三角形也不全是完全相似的一个三角形,且大小也发生了变化,如上图所示。我们得到了v0'v1'v2',这个三角形我们称之为中介三角形,接着我们要把每个三角形分开拟合成跟原三角形v0v1v2完全全等的三角形,我们定义拟合阶段的三角形变形能为:

当然我们还需要保证变形前后的也与原三角形相似:

这样联立公式(9)、(10),同时对其求偏导,使得变形能最小化:

记住,这一步是对每个三角形进行分开调整,这样才能得到与原网格模型的三角形完全相似。同时在满是上面式子后,对整个三角形以重心坐标为缩放原点,对每个三角形进行缩放调整
(4)整体拟合
上面那一部是对每个三角形分开调整,这个时候,每个三角形是完全独立的,我们需要对齐对整体连接调整,否则两个邻接三角形的共用边的两个顶点的位置各不一样,这样根本是不是三角网格模型。
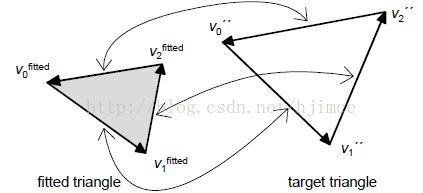

整个三角网格模型的总能量为:

H是一个表示整个网格模型拓扑连接关系的矩阵,对上式换另外一种表达方式,并对其求偏导,求取最小值:
简化为:

然后重新求解,可得到自由顶点u的坐标。
二、算法流程
输入:原三角网格模型,控制顶点
输出:变形后的三角网格模型
Algorithm:
1、整体相似变换
(1)计算原网格模型的相对坐标。根据给定的原三角网格模型,遍历每一个三角面片,
并计算每个顶点,相对于另外两个顶点的坐标。以计算v2相对于边v0v1的坐标为例:

(x01,y01)表示的是一个相对坐标,如果三角形的三个顶点的坐标已知v0,v1,v2,其实计算这个相对坐标是非常容易的。
(1)建立局部坐标轴。先求出边向量v0v1,然后利用v0v1求出其单位向量即为局部坐标系的x轴,接着只需要把x轴旋转90度,就可以得到y轴了。
(2)计算相对坐标(x01,y01),这一步首先需要把向量v0v2投影到x轴,y轴。这里需要注意的是我们上面的公式中x轴指的是v0v1,y轴指的是把v0v1旋转90度后的向量,因此我们需要对投影结果做一个缩放处理
相关代码实现如下:
- // 遍历网格模型的每个三角面片
- for ( unsigned int i = 0; i < nTris; ++i ) {
- Triangle & t = m_vTriangles[i];//第i个三角面片
- //计算当前三角形每个顶点相对于另外两个顶点的坐标
- for ( int j = 0; j < 3; ++j ) {
- unsigned int n0 = j;
- unsigned int n1 = (j+1)%3;
- unsigned int n2 = (j+2)%3;//三角面片三个顶点的索引
- Eigen::Vector2d v0 = GetInitialVert( t.nVerts[n0] );
- Eigen::Vector2d v1 = GetInitialVert( t.nVerts[n1] );
- Eigen::Vector2d v2 = GetInitialVert( t.nVerts[n2] );//三角面片三个顶点的坐标
- //建立局部坐标系的 x轴 与y 轴
- Eigen::Vector2d v01( v1 - v0 );
- Eigen::Vector2d v01N( v01 );
- v01N.normalize();//边向量v0v1的方向向量 x轴
- Eigen::Vector2d v01Rot90( v01(1), -v01(0) );
- Eigen::Vector2d v01Rot90N( v01Rot90 ); v01Rot90N.normalize();//垂直于边v0v1的方向向量 y轴
- //计算局部相对坐标
- Eigen::Vector2d vLocal(v2 - v0);
- float fX = vLocal.dot(v01) /SquaredLength(v01);//计算局部相对坐标x01
- float fY = vLocal.dot(v01Rot90) /SquaredLength(v01Rot90);//计算局部相对坐标y01
- Eigen::Vector2d v2test(v0 + fX * v01 + fY * v01Rot90);
- float fLength = Length(v2test - v2);
- t.vTriCoords[j] = Eigen::Vector2d(fX,fY);//局部相对坐标(x01,y01)
- }
- }
(2)构造公式(7)的相关矩阵。
- void RigidMeshDeformer2D::PrecomputeOrientationMatrix()
- {
- std::vector
- std::set
::iterator cur(m_vConstraints.begin()), end(m_vConstraints.end()); - while ( cur != end )
- vConstraintsVec.push_back( *cur++ );
- unsigned int nVerts = (unsigned int)m_vDeformedVerts.size();
- m_mFirstMatrix.resize( 2*nVerts, 2*nVerts);
- for ( unsigned int i = 0; i < 2*nVerts; ++i )
- for ( unsigned int j = 0; j < 2*nVerts; ++j )
- m_mFirstMatrix(i,j) = 0.0;
- size_t nConstraints = vConstraintsVec.size();
- unsigned int nFreeVerts = nVerts - nConstraints;
- unsigned int nRow = 0;
- m_vVertexMap.resize(nVerts);
- for ( unsigned int i = 0; i < nVerts; ++i ) {
- Constraint c(i, vec2(0,0));
- if ( m_vConstraints.find(c) != m_vConstraints.end() )
- continue;
- m_vVertexMap[i] = nRow++;
- }
- for ( unsigned int i = 0 ; i < nConstraints; ++i )
- m_vVertexMap[vConstraintsVec[i].nVertex ] = nRow++;
- size_t nTriangles = m_vTriangles.size();
- for ( unsigned int i = 0; i < nTriangles; ++i ) {
- Triangle & t = m_vTriangles[i];
- double fTriSumErr = 0;
- for ( int j = 0; j < 3; ++j ) {
- double fTriErr = 0;
- int n0x = 2 * m_vVertexMap[ t.nVerts[j] ];
- int n0y = n0x + 1;
- int n1x = 2 * m_vVertexMap[ t.nVerts[(j+1)%3] ];
- int n1y = n1x + 1;
- int n2x = 2 * m_vVertexMap[ t.nVerts[(j+2)%3] ];
- int n2y = n2x + 1;
- float x = t.vTriCoords[j](0);
- float y = t.vTriCoords[j](1);
- m_mFirstMatrix(n0x,n0x)+= 1 - 2*x + x*x + y*y;
- m_mFirstMatrix(n0x,n1x)+= 2*x - 2*x*x - 2*y*y;
- m_mFirstMatrix(n0x,n1y)+= 2*y;
- m_mFirstMatrix(n0x,n2x)+= -2 + 2*x;
- m_mFirstMatrix(n0x,n2y)+= -2 * y;
- m_mFirstMatrix(n0y,n0y)+= 1 - 2*x + x*x + y*y;
- m_mFirstMatrix(n0y,n1x)+= -2*y;
- m_mFirstMatrix(n0y,n1y)+= 2*x - 2*x*x - 2*y*y;
- m_mFirstMatrix(n0y,n2x)+= 2*y;
- m_mFirstMatrix(n0y,n2y)+= -2 + 2*x;
- m_mFirstMatrix(n1x,n1x)+= x*x + y*y;
- m_mFirstMatrix(n1x,n2x)+= -2*x;
- m_mFirstMatrix(n1x,n2y)+= 2*y;
- m_mFirstMatrix(n1y,n1y)+= x*x + y*y;
- m_mFirstMatrix(n1y,n2x)+= -2*y;
- m_mFirstMatrix(n1y,n2y)+= -2*x;
- m_mFirstMatrix(n2x,n2x)+= 1;
- m_mFirstMatrix(n2y,n2y)+= 1;
- }
- }
- Eigen::MatrixXd mG00( 2*nFreeVerts, 2*nFreeVerts );
- ExtractSubMatrix( m_mFirstMatrix, 0, 0, mG00 );
- Eigen::MatrixXd mG01( 2 * (int)nFreeVerts, 2 * (int)nConstraints );
- ExtractSubMatrix( m_mFirstMatrix, 0, 2*nFreeVerts, mG01 );
- Eigen::MatrixXd mG10( 2 * (int)nConstraints, 2 * (int)nFreeVerts );
- ExtractSubMatrix( m_mFirstMatrix, 2*nFreeVerts, 0, mG10 );
- //
- Eigen::MatrixXd mGPrime = mG00 + mG00.transpose();
- Eigen::MatrixXd mB = mG01 + mG10.transpose();
- Eigen::MatrixXd mGPrimeInverse=mGPrime.inverse();
- Eigen::MatrixXd mFinal = mGPrimeInverse * mB;
- mFinal *= -1;
- m_mFirstMatrix = mFinal;
- }
2、局部完全相似,及大小缩放调整。
计算公式(11)的F、C矩阵:
- //计算公式11 F、C矩阵
- void RigidMeshDeformer2D::PrecomputeScalingMatrices( unsigned int nTriangle )
- {
- //遍历每个三角形
- Triangle & t = m_vTriangles[nTriangle];
- t.mF =Eigen::MatrixXd(4,4);
- t.mC = Eigen::MatrixXd(4,6);
- double x01 = t.vTriCoords[0](0);
- double y01 = t.vTriCoords[0](1);
- double x12 = t.vTriCoords[1](0);
- double y12 = t.vTriCoords[1](1);
- double x20 = t.vTriCoords[2](0);
- double y20 = t.vTriCoords[2](1);
- double k1 = x12*y01 + (-1 + x01)*y12;
- double k2 = -x12 + x01*x12 - y01*y12;
- double k3 = -y01 + x20*y01 + x01*y20;
- double k4 = -y01 + x01*y01 + x01*y20;
- double k5 = -x01 + x01*x20 - y01*y20 ;
- double a = -1 + x01;
- double a1 = pow(-1 + x01,2) + pow(y01,2);
- double a2 = pow(x01,2) + pow(y01,2);
- double b = -1 + x20;
- double b1 = pow(-1 + x20,2) + pow(y20,2);
- double c2 = pow(x12,2) + pow(y12,2);
- double r1 = 1 + 2*a*x12 + a1*pow(x12,2) - 2*y01*y12 + a1*pow(y12,2);
- double r2 = -(b*x01) - b1*pow(x01,2) + y01*(-(b1*y01) + y20);
- double r3 = -(a*x12) - a1*pow(x12,2) + y12*(y01 - a1*y12);
- double r5 = a*x01 + pow(y01,2);
- double r6 = -(b*y01) - x01*y20;
- double r7 = 1 + 2*b*x01 + b1*pow(x01,2) + b1*pow(y01,2) - 2*y01*y20;
- //计算F矩阵
- // F矩阵的第一行
- t.mF(0,0)= 2*a1 + 2*a1*c2 + 2*r7;
- t.mF(0,1)= 0;
- t.mF(0,2)= 2*r2 + 2*r3 - 2*r5;
- t.mF(0,3)= 2*k1 + 2*r6 + 2*y01;
- // F矩阵的第二行
- t.mF(1,0)= 0;
- t.mF(1,1)= 2*a1 + 2*a1*c2 + 2*r7;
- t.mF(1,2)= -2*k1 + 2*k3 - 2*y01;
- t.mF(1,3)= 2*r2 + 2*r3 - 2*r5;
- // F矩阵的第三行
- t.mF(2,0)= 2*r2 + 2*r3 - 2*r5;
- t.mF(2,1)= -2*k1 + 2*k3 - 2*y01;
- t.mF(2,2)= 2*a2 + 2*a2*b1 + 2*r1;
- t.mF(2,3)= 0;
- //F矩阵的第四行
- t.mF(3,0)= 2*k1 - 2*k3 + 2*y01;
- t.mF(3,1)= 2*r2 + 2*r3 - 2*r5;
- t.mF(3,2)= 0;
- t.mF(3,3)= 2*a2 + 2*a2*b1 + 2*r1;
- // 求逆
- Eigen::MatrixXd mFInverse=t.mF.inverse();
- mFInverse *= -1.0;
- t.mF = mFInverse;
- //计算C矩阵
- // C矩阵的第一行
- t.mC(0,0)= 2*k2;
- t.mC(0,1)= -2*k1;
- t.mC(0,2)= 2*(-1-k5);
- t.mC(0,3)= 2*k3;
- t.mC(0,4)= 2*a;
- t.mC(0,5)= -2*y01;
- // C矩阵的第二行
- t.mC(1,0)= 2*k1;
- t.mC(1,1)= 2*k2;
- t.mC(1,2) = -2*k3;
- t.mC(1,3)= 2*(-1-k5);
- t.mC(1,4)= 2*y01;
- t.mC(1,5)= 2*a;
- // C矩阵的第三行
- t.mC(2,0)= 2*(-1-k2);
- t.mC(2,1)= 2*k1;
- t.mC(2,2)= 2*k5;
- t.mC(2,3)= 2*r6;
- t.mC(2,4)= -2*x01;
- t.mC(2,5)= 2*y01;
- //C矩阵的第四行
- t.mC(3,0)= 2*k1;
- t.mC(3,1)= 2*(-1-k2);
- t.mC(3,2)= -2*k3;
- t.mC(3,3)= 2*k5;
- t.mC(3,4)= -2*y01;
- t.mC(3,5)= -2*x01;
- }
并求解公式11,得每个三角面片新顶点的位置
3、全局连接拟合。
构造公式(16)的相关矩阵:
- void RigidMeshDeformer2D::PrecomputeFittingMatrices()
- {
- std::vector
- std::set
::iterator cur(m_vConstraints.begin()), end(m_vConstraints.end()); - while ( cur != end )
- vConstraintsVec.push_back( *cur++ );
- unsigned int nVerts = (unsigned int)m_vDeformedVerts.size();
- size_t nConstraints = vConstraintsVec.size();
- unsigned int nFreeVerts = nVerts - nConstraints;
- unsigned int nRow = 0;
- m_vVertexMap.resize(nVerts);
- for ( unsigned int i = 0; i < nVerts; ++i )
- {
- Constraint c(i,vec2(0,0));
- if ( m_vConstraints.find(c) != m_vConstraints.end() )
- continue;
- m_vVertexMap[i] = nRow++;
- }
- for ( unsigned int i = 0 ; i < nConstraints; ++i )
- m_vVertexMap[vConstraintsVec[i].nVertex ] = nRow++;
- Eigen::VectorXd gUTestX( nVerts ), gUTestY(nVerts);
- for ( unsigned int i = 0; i < nVerts; ++i )
- {
- Constraint c(i,vec2(0,0));
- if ( m_vConstraints.find(c) != m_vConstraints.end() )
- continue;
- int nRow = m_vVertexMap[i];
- gUTestX[nRow] = m_vInitialVerts[i].vPosition(0);
- gUTestY[nRow] = m_vInitialVerts[i].vPosition(1);
- }
- for ( unsigned int i = 0; i < nConstraints; ++i ) {
- int nRow = m_vVertexMap[ vConstraintsVec[i].nVertex ];
- gUTestX[nRow] = vConstraintsVec[i].vConstrainedPos[0];
- gUTestY[nRow] = vConstraintsVec[i].vConstrainedPos[1];
- }
- Eigen::MatrixXd mHX( nVerts, nVerts );
- Eigen::MatrixXd mHY( nVerts, nVerts );
- for ( unsigned int i = 0; i < nVerts; ++i )
- for ( unsigned int j = 0; j < nVerts; ++j )
- mHX(i,j) = mHY(i,j) = 0.0;
- size_t nTriangles = m_vTriangles.size();
- for ( unsigned int i = 0; i < nTriangles; ++i ) {
- Triangle & t = m_vTriangles[i];
- double fTriSumErr = 0;
- for ( int j = 0; j < 3; ++j ) {
- double fTriErr = 0;
- int nA = m_vVertexMap[ t.nVerts[j] ];
- int nB = m_vVertexMap[ t.nVerts[(j+1)%3] ];
- mHX(nA,nA)+= 2;
- mHX(nA,nB)+= -2;
- mHX(nB,nA)+= -2;
- mHX(nB,nB)+= 2;
- mHY(nA,nA)+= 2;
- mHY(nA,nB)+= -2;
- mHY(nB,nA)+= -2;
- mHY(nB,nB)+= 2;
- }
- }
- Eigen::MatrixXd mHX00( (int)nFreeVerts, (int)nFreeVerts );
- Eigen::MatrixXd mHY00( (int)nFreeVerts, (int)nFreeVerts );
- ExtractSubMatrix( mHX, 0, 0, mHX00 );
- ExtractSubMatrix( mHY, 0, 0, mHY00 );
- Eigen::MatrixXd mHX01( (int)nFreeVerts, (int)nConstraints );
- Eigen::MatrixXd mHX10( (int)nConstraints, (int)nFreeVerts );
- ExtractSubMatrix( mHX, 0, nFreeVerts, mHX01 );
- ExtractSubMatrix( mHX, nFreeVerts, 0, mHX10 );
- Eigen::MatrixXd mHY01( (int)nFreeVerts, (int)nConstraints );
- Eigen::MatrixXd mHY10( (int)nConstraints, (int)nFreeVerts );
- ExtractSubMatrix( mHY, 0, nFreeVerts, mHY01 );
- ExtractSubMatrix( mHY, nFreeVerts, 0, mHY10 );
- m_mHXPrime = mHX00;
- m_mHYPrime = mHY00;
- m_mDX = mHX01;
- m_mDY = mHY01;
- m_mLUDecompX=Eigen::FullPivLU
- m_mLUDecompY=Eigen::FullPivLU
- }
这篇paper的总思路就是分成三步,因为如果控制顶点、和自由顶点的没有发生变化,相关的矩阵只要经过第一次求解就可以了,因此可以实现实时拖拽更新,这个我在三维图形学网格曲面变形的时候,用到的拉普拉斯网格变形的方法思路大体相同,需要对原网格模型做预处理操作,然后才能实现实时变形。具体这个算法要和图像结合起来,就要对图像进行三角剖分,然后计算每个三角形的放射变换矩阵,根据仿射变换矩阵计算每个像素点值的变化,才能对图像进行变形,具体就不贴代码了,因为这一些代码都是比较简单的,没有什么技术含量在里面。本文地址:http://blog.csdn.net/hjimce/article/details/45766321 作者:hjimce 联系qq:1393852684 更多资源请关注我的博客:http://blog.csdn.net/hjimce 原创文章,转载请保留本行信息