golang——map
目录
1.map特点
2.map声明和初始化
变量初始化
3.map常见操作
4.map的嵌套
5.golang中map底层结构
6.map遍历为什么是无序的
7.map为什么是非线程安全的
8.实现map线程安全
9.map如何查找
10.map的key可以使用那些类型
11.map冲突的解决方式
12.go map的负载因子为什么是6.5
13.go map如何扩容
14.sync.map和map对比
1.map特点
以键值对为元素的数据集合
特点:
1.键不能重复
2.键必须可哈希(int/bool/float/string/array)
3.无序
快:可以直接根据键值找到数据存储的位置,而不用从前到后一一比对
2.map声明和初始化
package main import "fmt" func main() { userInfo := map[string]string{} userInfo1 := map[string]string{"name": "xxx", "age": "18"} //新增键值 userInfo["name"] = "000" //修改键值 userInfo1["name"] = "111" fmt.Println(userInfo) fmt.Println(userInfo1) }用make进行初始化
package main import "fmt" func main() { userInfo2 := make(map[string]string) //初始化容量cap为10 userInfo3 := make(map[string]string,10) userInfo2["name"] = "222" fmt.Println(userInfo2) fmt.Println(userInfo3) v1 := make(map[[2]int]float32) v1[[2]int{1, 1}] = 1.4 v1[[2]int{1, 3}] = 5.3 fmt.Println(v1) v2 := make(map[[2]int][3]float32) v2[[2]int{1, 1}] = [3]float32{1.0, 2.1, 3.5} v2[[2]int{1, 3}] = [3]float32{1.0, 2.1, 3.5} fmt.Println(v2) }注意:
- 只声明map,维护了一个nil,添加键值时会报错 panic: assignment to entry in nil map
一般只用于整体赋值
package main func main() { var userInfo map[string]string //只声明,无法添加键值对 userInfo["name"] = "000" }package main func main() { userInfo0 := map[string]string{} var userInfo map[string]string userInfo=userInfo0 //只声明,无法添加键值对 userInfo["name"] = "000" }整体赋值时,userInfo0和userInfo始终指向同一个地址,不会像切片一样因为扩容导致指向同一个地址
- 用new分配内存返回的是指针,添加键值时会报错
一般只用于整体赋值
package main import "fmt" func main() { userInfo := new(map[string]string) userInfo1 := map[string]string{} //userInfo["name"] = "xxx" 报错 userInfo = &userInfo1 fmt.Println(userInfo) }
变量初始化
变量初始化=变量声明+变量内存分配
make和new主要是用来分配内存的
var是用来声明变量的
var值声明
- 值类型变量
系统会默认为他分配内存空间,并赋该类型的零值
- 指针类型/引用类型变量
系统不会为它分配内存,默认为nil,如果直接使用,系统会抛异常,必须进行内存分配才能使用
make和new
make和new是内置函数,不是关键字
二者都是分配空间
- 但是new返回值类型的指针
- 而make返回的是类型本身
- make只能用于slice、map、chan的初始化
- new可以分配任意类型的数据,并且置零
- new分配的空间会被清零
- make则会初始化
3.map常见操作
获取长度&容量
m := make(map[string]string, 10) 获取长度,即存储的键值对个数 len:=len(m) 获取容量,cap为根据参数值10计算出的合适容量 cap:=cap(m) 不支持,会报错删除
delete(userInfo,"name")查
- 单个——m[key]
- 全部——循环
4.map的嵌套
值嵌套
值可为任意类型
package main func main() { v1:=make(map[string][2]map[int]int) v2:=make(map[string][]int) v1["xx"]=[2]map[int]int{map[int]int{1:2,2:3},map[int]int{1:3,4:5}} v2["xx"]=[]int{1,2,3} }键嵌套
键不可重复,且键必须可哈希
不可哈希类型不可内嵌在键中
package main func main() { v1 := make(map[[2]int]int) v1[[2]int{1,2}]=1 }
5.golang中map底层结构

- hmap(哈希表,含指向桶数组的指针)
- bmap(桶)
- mapextra(溢出桶)
Go中的map是一个指针,指向hmap结构体
hmap是哈希表,hamp通过buckets指针指向结构为bmap的数组,每个bmap底层都采用链表结构,
bmap为桶,每一个桶最多存8个键值对,如果放满8个,通过bmap内的overflow指针指向溢出桶
根据key计算出的hash值
- 低B位决定放入哪个桶,同一个桶内哈希结果的低B位相同
- 高8位决定key落入桶内的哪个位置(1-8)
type hmap struct{ //哈希表中元素个数,调用len(map)时,返回的就是该字段 count int //状态标志(是否处于正在写入的状态等,如果有线程正在写入,就不能读写) flags uint8 //buckets(桶)的对数 //如果B=5,buckets桶的长度=2^B=32,有32个桶 B uint8 //溢出桶的数量 noverflow uint16 //生成哈希的随机种子 hash0 uint32 //指向buckets数组的指针,数组大小为2^B,如果元素个数为0,指向nil buckets unsafe.Pointer //如果发生扩容,oldbuckets指向老的buckets数组,老的buckets数组大小是新的的1/2,非扩容状态下为nil oldbuckets unsafe.Pointer //表示扩容进度,小于此地址的buckets代表已经搬迁完成 nevacuate uintptr //存储溢出桶,为了优化GC扫描而设计 extra *mapextra }type bmap struct{ tophash [bucketCnt]uint8 //len为8的数组 //用来快速定位key是否在这个bmap中 //一个桶最多8个槽位,如果key所在的tophash值在tophash中,则代表该key在这个桶中 }在编译过程中runtime.bmap会拓展成以下结构体
type bmap struct{ tophash [8]uint8 //keytype由编译器编译时确定 keys [8]keytype //elemtype由编译器编译时确定 values [8]elemtype //overflow指向下一个bmap,overflow是uintptr而不是*bmap类型,是为了减少gc,溢出桶存储到extra字段中 overflow uintptr }tophash
用于实现快速定位key的位置,存储哈希值的高8位,比对时会先比较高8位
存储:
- 在实现过程中会使用key的hash值的高8位作为tophash值
- tophash字段不仅存储key哈希值的高8位,还会存储一些状态值,用来表明当前桶单元状态,这些状态值都是小于minTopHash的,为了避免key哈希值的高8位值和这些状态值相等,产生混淆情况,所以当key哈希值高8位小于minTopHash时,自动将其值加上minTopHash作为该key的TopHash
key和value是各自放在一起的,并不是k/v/k/v这种形式,当key和value类型不一样时,key和value占用的字节大小不一样,k/v这种形式,可能会因为内存对齐而导致空间浪费,go这种形式将key和value分开存储,更加节省内存空间

初始化过程
初始化一个可容纳10个元素的map
info := make(map[string]string,10)Step1.创建一个hmap结构体对象
Step2.生成一个哈希因子hash0并赋值到hmap对象中(用于后续为key创建哈希值)
Step3.根据hint=0,并根据算法规则来创建B,当前B应该为1
hint B
0~8 0
9~13 1
14~26 2
Step4.根据B去创建桶(bmap对象)并存放在buckets数组中,当前bmap的数量应为2
当B<4时,根据B创建桶的个数的规则为:2^B(标准桶)
当B≥4时,根据B创建桶的个数的规则为:2^B+2^(B-4) (标准桶+溢出桶)
写入数据过程
info["name"]="xxx"Step1.结合hash因子hash0和键生成哈希值
Step2.获取哈希值的后B位,并根据后B位的值来决定此键值对存入到哪个桶中
Step3.在上一步确定桶之后,接下来在桶中写入数据
Step4.hmap的个数count++(map中的元素个数+1)
读取数据过程
value := info["name"]Step0.写保护监测,如果flag标志位被置1,说明有其他协程正在“写”,从而导致程序panic
Step1.结合哈希因子和键生成哈希值
Step2.获取哈希值的后B位,并根据后B位的值决定将此键值对存放到哪个桶中
如果当前正在扩容中,并且定位到的旧bucket数据还未完成迁移,则使用旧的bucket(扩容前的bucket)
Step3.确定桶之后,再根据key的哈希值计算出tophash(哈希值高8位),根据tophash和key值去桶中查找数据,如果不在,需要到overflow中查找

扩容过程
向map中添加数据时,当达到某个条件,则会引发字典扩容。
扩容条件:
- map中 数据总个数/桶个数(负载因子) >6.5,引发翻倍扩容
- 使用了太多的溢出桶时(溢出桶使用的太多会导致map处理速度降低)
B≤15,已使用的溢出桶个数≥
时,引发等量扩容
B>15,已使用的溢出桶个数≥
时,引发等量扩容
扩容后oldbuckets指向旧桶
迁移
即将旧桶中数据迁移到新桶中
翻倍扩容:将旧桶中的数据分流至新的两个桶中(比例不定),并且桶编号位置为:同编号位置和翻倍后对应编号位置
等量扩容(溢出桶太多引发的扩容):将旧桶(含溢出桶)的值迁移到新桶中
意义:当溢出桶比较多而每个桶中数据不多,可以通过等量扩容和迁移让数据更加紧凑,从而减少溢出桶
6.map遍历为什么是无序的
使用range多次遍历map值时输出的key和value的顺序可能不同->开发者有意为之
原因:
- map在遍历时,并不是从固定的0号bucket开始遍历,而是从一个随机序号的bucket,再从其中随机的cell开始遍历
- map遍历时,是按序遍历bucket,同时按序遍历overflow bucket中的cell,但是map在扩容后,会发生key的搬迁,造成原来落在一个bucket中的key,搬迁后,有可能落到其他bucket中
如果想顺序遍历map,需要对map key先排序,再按照key的顺序遍历map
package main import ( "fmt" "sort" ) func main() { fmt.Println("first range:") m := map[int]string{1: "a", 2: "b", 3: "c"} for i, v := range m { fmt.Printf("m[%v]=%v\n", i, v) } fmt.Println("second range:") var sl []int for i := range m { sl = append(sl, i) } sort.Ints(sl) for _, v := range sl { fmt.Printf("m[%v]=%v\n", v, m[v]) } }
7.map为什么是非线程安全的
考虑map更应适配典型使用场景,而不是为了小部分情况(并发访问),导致大部分程序付出加锁代价,决定不支持
map默认是并发不安全的,同时对map进行并发读写时,程序会出现错误
fatal error:concurrent map writes,程序panic
package main import "fmt" func main() { s := make(map[int]int) for i := 0; i < 100; i++ { go func(i int) { s[i] = i }(i) } for i := 0; i < 100; i++ { go func(i int) { fmt.Printf("map第%d个元素值是%d", i, s[i]) }(i) } }

8.实现map线程安全
两种方式:
- 读写锁
map+sync.RWMutexpackage main import ( "fmt" "sync" "time" ) func main() { var lock sync.RWMutex s := make(map[int]int) for i := 0; i < 100; i++ { go func(i int) { lock.Lock() s[i] = i lock.Unlock() }(i) } for i := 0; i < 100; i++ { go func(i int) { lock.RLock() fmt.Printf("map第%d个元素值是%d\n", i, s[i]) lock.RUnlock() }(i) } //防止没执行完就退出了 time.Sleep(time.Second * 1) }
- 使用Go提供的sync.map
package main import ( "fmt" "sync" "time" ) func main() { var s sync.Map for i := 0; i < 100; i++ { go func(i int) { s.Store(i, i) }(i) } for i := 0; i < 100; i++ { go func(i int) { load, _ := s.Load(i) fmt.Printf("map第%d个元素值是%d\n", i, load) }(i) } //防止没执行完就退出了 time.Sleep(time.Second * 1) }
9.map如何查找
Go读取map有两种语法
m := map[int]string{1: "a", 2: "b", 3: "c"}
- 不带comman
不存在时,返回value类型的零值
v := m[1] fmt.Println(v)
- 带comman
ok为bool值,表示是否存在
v, ok := m[2] fmt.Println(v, ok)
10.map的key可以使用那些类型
必须是可比较类型,数组、chan、指针等
不可比较slice、func、map
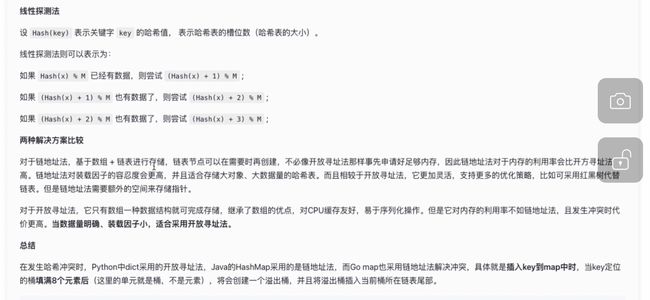
11.map冲突的解决方式
常见解决方法:
- 链地址法(尾插)
- 开放寻址法
从发生冲突的那个单元起,按照一定的次序,从哈希表中寻找一个空闲的单元,然后把发生冲突的元素存入到该单元。开放寻址法需要的表长度要大于等于所需要存放的元素数量
- 线性探测法
- 平方探测法
- 随机探测法
- 双重哈希法
Go——链地址法,插入key
12.go map的负载因子为什么是6.5
负载因子=哈希表存储元素个数/桶个数
- 扩容
当程序运行时,出现负载因子过大,需要扩容,解决bucket过大的问题
- 迁移
当程序运行时,会不断地进行插入、删除等,会导致bucket不均,内存利用率低,需要迁移
参考各负载因子下的
- 溢出率
- 平均每对key/value的开销字节数
- 查找一个存在的key时,要查找的平均个数
- 查找一个不存在的key时,要查找的平均个数
当装载因子越大,填入元素越多,空间利用率就越高,发生哈希冲突的几率就越大
当负载因子越小,填入元素越少,冲突发生的几率减小,但空间浪费更多,还会提高扩容操作的次数
go选择了一个相对适中的值
13.go map如何扩容
- 扩容时机
在向map插入新key时,会进行条件检测,符合下面这两个条件,就会触发扩容
if !h.growing() && (overLoadFactor(h.count+1,h.8)|| tooManyOverflowBuckets(h.noverflow,h.8){ } //判断是否在扩容 func(h *heap)growing()bool{ return h.oldbuckets!=nil }
- 扩容条件
(1)超过负载
func overLoadFactor(count int,B uint8)bool{ return count > bucketCnt && uintptr(count)>loadFactor*bucketShift(8) } bucketCnt = 8 一个桶可以装的最大元素个数 loadFactor =6.5 负载因子,平均每个桶的元素个数 bucketShift(8) 桶的个数(2)溢出桶太多
当桶总数<2^15时,如果溢出桶总数≥桶总数,则认为溢出桶过多
当桶总数≥2^15时,直接与2^15比较,当溢出桶总数≥2^15时,即认为溢出桶太多
- 扩容机制
双倍扩容
等量扩容
渐进式哈希——最多每次只搬迁2个bucket

14.sync.map和map对比
type Map struct{ mu Mutex read atomic.Value dirty map[interface{}]*entry misses int }对比原始map,和原始map+RWLock实现并发的方式,减小了加锁对性能的影响
采用了空间换时间的机制,冗余了两个数据结构
- read 负责读取(无锁)
- dirty 负责写入(写入dirty,并且更新read)
他做了一些优化:
可以无锁访问read map,优先操作read map 如果只操作read map就可以满足要求,那么就不用去操作write map(dirty),所以某些特定场景发生锁竞争的频率会远远小于map+RWLock的实现方式
优点:
适合读多写少的场景
缺点:
写多的场景,会导致read map缓存失效,需要加锁,冲突变多,性能急剧下降