线性代数的本质——动画+描述(向量、矩阵、线性变换和矩阵乘法)
线性代数的本质——动画+描述(向量、矩阵、线性变换和矩阵乘法)
目录:
- 线性代数的本质——动画+描述(向量、矩阵、线性变换和矩阵乘法)
-
-
-
- 一、向量和矩阵
-
- 1.向量的本质
- 2.线性组合、张成的空间与基
- 3.矩阵与线性变换(重点)
- 4.矩阵乘法
- 二、待更新...
-
- 1.待更新...
-
-
源视频:
- 线性代数的本质 - 系列合集
一、向量和矩阵
1.向量的本质
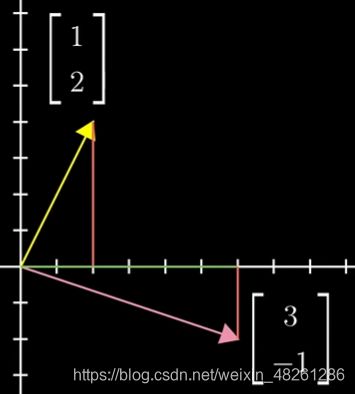
在线性代数中,我们约定使用下述方式来描述向量——2×1的矩阵,在计算机中称为一维数组:
![]()

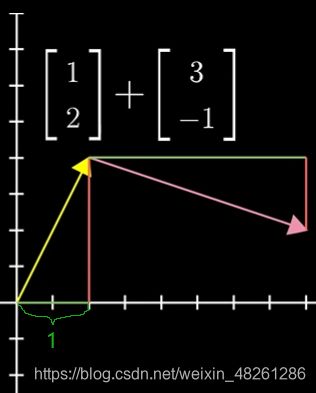
在二维空间中,两个向量的相加,即两个1×2的矩阵直接相加,符合了矩阵相加的定义

![]()
2.线性组合、张成的空间与基
在二维平面中,有两个十分重要的向量:i——i帽,x轴的单位向量;j——j帽,y轴的单位向量,二维平面中的所有点,都可以是 ai+bj 组成的二元方程来描述,它们是二维平面坐标系的基
一组基的方向是确定的,通过基的组合来定义的向量组合,那么这组向量可以通过向量的缩放——即模长发生变化来描述这组向量所指的位置——即 ai 和 bj 的线性组合构成 ai+bj

实际上,除了 i帽 和 j帽 外,我们完全可以指定另外任意一组基,如下图所示:下图中 v 和 w 的线性组合是基于除 i帽 和 j帽 外的另外一组基组成的
我们发现,线性组合通过向量的缩放(注:方向不变),我们可以得到二维平面上的所有点/所有向量,因此,当我们想要使用数字来描述向量时,我们都离不开坐标系的基,此时我们称这组基为一组线性组合
- 定义:对于所有可以表示为给定向量线性组合的向量的集合,称为给定向量张成的空间
因此,上述v 和 w 的线性组合所张成的空间是一个平面
此时,如果我们在 v 和 w 的线性组合的基础上再在三维空间上增加一个 u 向量,当我们对 u 向量进行缩放时,它能够将 v 和 w 所张成的平面延 u 的方向来回移动,从而扫过整个三维空间,这样,我们通过 v 、w 和 u 的线性组合就可以得到三维空间上的所有点/所有向量,这就是 u 向量对空间张成的贡献
再观察下图,我们发现,在二维空间中,如果一组向量组合在同一条直线上时,那么它们所张成的空间则是一条直线,而无法向一个平面进行扩展,即有一个基向量是多余的,没有对空间的张成作出贡献
同理,如果我们在三维空间内,也可以得到类似的情况,当新增的 u 向量是定义在 v 和 w 所张成的平面上时,那么它们所张成的空间仍然只是一个平面,而无法向三维空间扩展,即有一个基向量是多余的,没有对空间的张成作出贡献
- 定义:如果你有多个向量,并且可以通过移除其中一个向量而不减小张成的空间,我们称它们是线性相关的
- 或者说:在一组向量中,有其中一个向量,它落在了其他向量所张成的空间中时,就称它们是线性相关的
- 另一方面,如果所有向量都给张成的空间增添了新的维度,即所有向量都对空间的张成作出了贡献,就称它们是线性无关的
3.矩阵与线性变换(重点)
线性变换:简单理解来说,变换其实就是函数的另一种说法,即它接受一个输入,同时输出对应的结果。
线性变换一词实则是在暗示一种以特点的方式来可视化这一 输入-输出 的关系,那怎么用几何的手段描述这一过程呢?
在二维空间中,我们将用一个输入向量转换到输出向量的位置来理解线性变换

首先我们先将二维空间想象成一张无限网格:

这张二维空间网格是由无数的 点/向量 构成的,在二维空间发生变换时,我们可以想象成是二维网格上所有的点同时作变换
同时,为了更好地体会整个空间形状上的改变,我们在对无限网格上的所有点同时做变换的同时,在背景中保留原始网格的副本,以便追踪终点与起点的相对关系
二维空间的变换可以十分复杂,但幸运的是,线性代数限制在一种特殊类型的变换上——线性变换,在无限网格发生变化时,如果它具备以下两条性质,我们就称这种变换是线性的:
- 无限网格上的所有无限直线在变换后仍然保持为直线,不能有所弯曲
- 保持网格线的平行且等距分布
- 无限网格的原点必须保持固定,不能移动
(如:无限网格原点旋转就是线性变换,或上一动画演示的也是线性变换)
下图中,原变量为: v = -1i+2j,在运用某一线性变换后,我们发现变换后的向量 v 的位置,是变换后的 i帽 的 -1倍 与 变换后的 j帽 的 2倍 之和,即式 v = -1i+2j 仍然成立
经过下图中简单的运算,我们可以计算出向量 v 在经过刚才的线性变换之后,落在了原网格的 (5, 2) 上;其实由图即知,向量 v 确实落在了原网格的 (5, 2) 坐标上

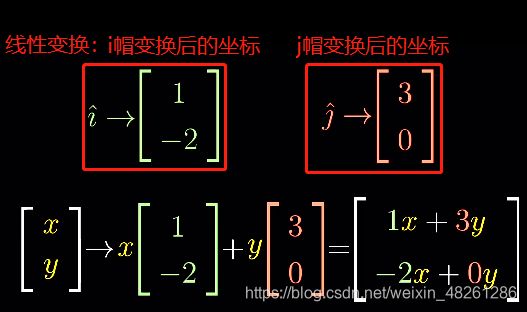
实际上,我们发现只要记录了变换后的 i帽 和 j帽 的坐标,我们就可以推断出任意向量在变换后的位置,而不必观察变换本身是什么样的
这里给出我们在通过上次的线性变换之后,坐标所发生的变化,即我们只需知道:
- 变换后的 i帽 的坐标
- 变换后的 j帽 的坐标
- 任一 点/向量 的坐标
我们就可以求出某个 点/向量(x, y) 在发生某一线性变换后的坐标:(1x+3y, -2x+0y)
-
这就是说,一个二维线性变换仅由四个数字完全确定——“变换后的 i帽 的坐标” 和 “变换后的 j帽 的坐标”
-
通常我们会将这些坐标包装在一个 2×2 的格子里,称它为 2×2 矩阵

- 实际上它们就是两个特殊的向量:“变换后的 i帽 的坐标” 和 “变换后的 j帽 的坐标”
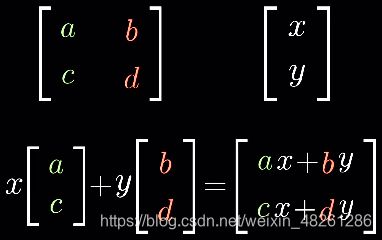
如果你有一个描述线性变换的 2×2矩阵,以及一个给定向量,你想要了解线性变换对这个向量的作用,你只需取出向量的坐标,将它们分别与矩阵的特点列相乘,然后将结果相加即可

于是,对于一般线性变换——(a, c) 看作是变换后的 i帽,(b, d) 看作是变换后的 j帽,研究该线性变换作用于向量 (x, y)

这就是线性变换对空间中 点/向量 的影响:
线性变换——旋转:
- 这种变换会将无限网格进行旋转变换
线性变换——错切:
- 这种变换会将无限网格的基轴线进行倾斜变换
线性变换——列线性相关:
- 列线性相关的线性变换会把二维空间拍扁成一条直线
例:想象出下图的线性变换
4.矩阵乘法
实际上,二维平面有时候需要进行多次线性变换(如图:先旋转,后错切):
(1) 从数值的角度上看,某一向量 (x, y) 经过这两轮线性变换后的结果,可以是先乘以旋转矩阵,后乘以错切矩阵的结果——即代表发生了两次线性变换
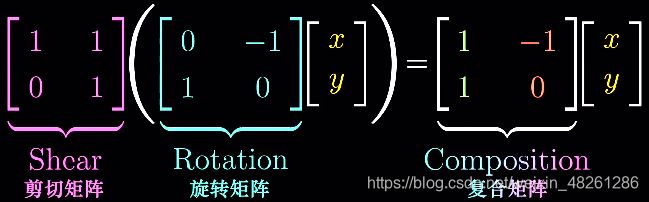
(2) 实际上,我们还可以先将两次线性变换的矩阵合成为一个新的复合矩阵,再对向量 (x, y) 进行变换
复合的顺序和函数的 f(g(x)) 是一致的,我们应该先看右端的矩阵再看左端的矩阵——先经过旋转变换,后经过错切变换
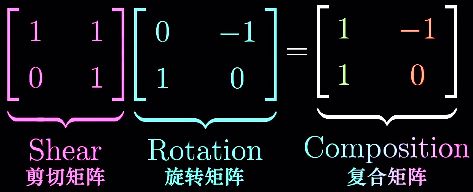
- 实际上,(1)(2)两者的结果是一致的
例如:对于 M2 × M1
我们可以把 经过 M1 矩阵变换后的基 i(1, 1) 和 j(-2, 0) 分别看作两个向量,并分别计算它们在 M2矩阵变换 下发生的变化:
- 把 M1 变换后的 i(1, 1) 视为一个向量

- 把 M2 变换后的 j(-2, 0) 视为一个向量
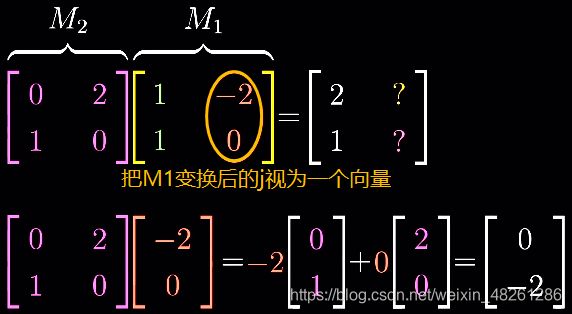

注:这种方法具有普适性,但是我们不能让 M1 和 M2 的反过来计算——即不能把M2视为坐标,因为我们是先进行 M1 变换,后进行 M2 变换的,这是因为 M1×M2≠M2×M1,这个就像函数的复合一样 f(g(x))≠g(f(x)),因为线性变换的先后顺序会影响到变换后的结果
因此,这就是矩阵相乘的几何意义
另外,对于矩阵的乘法结合律 (AB)C=A(BC),如果仅仅从数学公式上的范畴来进行证明,这个过程是十分平凡的,你无法得到任何启发;但通过几何方式的线性变换证明,就会有所理解:
A(BC):它的本质是C的坐标先经过B矩阵变换,再经过A矩阵变换
(AB)C:它的本质是AB矩阵变换的结果组成一个新的复合矩阵,再让C矩阵经过复合矩阵的变换
很显然,由于它们的变换顺序的是一致的,因此它们得到的结果也是一致的