雷达测速原理、分辨率、精度、速度模糊、盲速以及速度扩展算法知识汇总
基础知识:
- 多普勒效应是当振动波源与观测点之间存在相对运动时,观测点实际接收到的频率并不等于实际频率的现象。
- 波源与观测者正在接近,波长缩短,频率升高。波源与观测者正在相互远离,波长被拉长,频率被降低。
- 综上所述即为多普勒效应,雷达正是根据这一效应进行目标速度测量。
1.多普勒频率(雷达测速原理)
当目标与雷达之间存在相对运动时,若雷达发射信号的工作频率为0,则接收信号的频率为0+,为多普勒频移。将这种由于目标相对辐射源的运动而导致回波信号频率的变化称为多普勒效应。如图1所示,当目标向着雷达运动时,多普勒频率为正;当目标远离雷达时,多普勒频率为负。照射到目标上的波形具有间隔为λ(波长)的等相位波前,靠近雷达的目标导致反射回波的等相位波前相互靠近(较短波长),λ>′(′为反射波波长);反之,远离雷达运动的目标导致反射回波的等相位波前相互扩展(较长波长),λ<′。
 图 1
图 1
假定雷达的发射脉冲宽度为τ,对应的波程为L=(c为光速),目标的径向速度为,如图2所示,假定脉冲前沿到达目标与后延到达目标的时间间隔为∆,在∆时间内目标移向脉冲内的距离为d=∆。由于脉冲以光速传播,后延已经移动的距离为cτ−,那么
![]()
由上式,得到反射脉冲宽度′和入射脉冲宽度τ之间的关系为:
式中,(−)/(+)通常称为时间扩展因子。若=0,则τ=′。同理可以计算,当目标以速度原理雷达时,反射和入射脉冲宽度的关系为:

 图 2
图 2
为了推导出多普勒频率,图3考虑两个脉冲的情况,假设两个入射脉冲的重复频率为,脉冲1的前沿到达目标以后,脉冲2的前沿要花∆时间到达目标,电波传播的距离为(/)−,且脉冲2前沿在∆时间的延迟距离d=∆,则

经过简化得
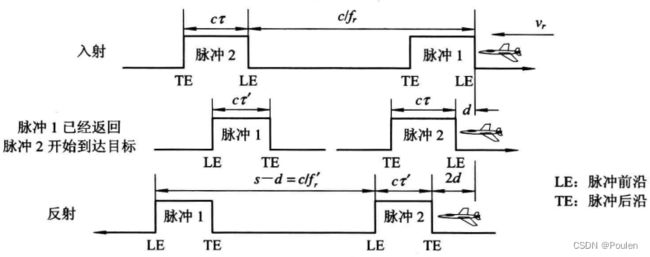 图 3
图 3
反射脉冲间隔‘所对应的波程为s-d,其中s=c∆,则回波脉冲的重复频率′=1/‘,且

由此,回波脉冲的PRF与入射脉冲的PRF之间的关系为:
由于周期的数量不变,反射信号的频率也以相同的因子上升,回波信号的载频0′与入射信号的载频0之间的关系为:
多普勒频率定义为回波信号的载频0′与入射信号的载频0之差,即

由于≪c,且波长/0,则
可见,多普勒频率与目标的径向速度成正比,因此,也可以从距离的变化率中提取,反之亦然。多普勒频率()也可以采用下列方法进行推导;图4给出了一个以速度向着雷达运动的目标,在0时刻(参考时间)的距离为0,那么在t时刻目标的距离为:
 图 4
图 4
若发射信号为s(t),不考虑传输衰减,则雷达接收信号为

这里0=2/(0+0),为相位常数。定义上式中变量t前面的比例系数(也称压缩因子)为γ,即

同理,对于一个远离雷达飞行的目标,比例因子为
于是雷达接收信号可以改写为
![]()
从上式中可以看出,与静止目标的回波相比,运动目标的回波信号是时间压缩形式,因此,根据傅里叶变换的比例特性,时间压缩信号的频谱将以因子γ扩展。考虑特殊情况,若发射信号为
![]()
式中0=20是以弧度每秒表示的中心频率。y(t)的傅里叶变换为Y(),则接收信号及其傅里叶变换为

为了简单,相位常数0在上式的傅里叶变换中被忽略。因此,接收信号的频谱出现在以γ0为中心处,而不是以0为中心处。由于目标运动产生的多普勒角频率为
![]()
将比例因子γ代入上式,多普勒频率为

同理,当目标以速度远离雷达时,多普勒频率为:
实际上,多普勒频率和雷达视线与目标运动方向之间的夹角有关,如图5所示,当雷达视线与目标运动方向之间的夹角为θ时,径向速度=,为目标速度vt投影到雷达视线上的径向速度,多普勒频率为
![]()
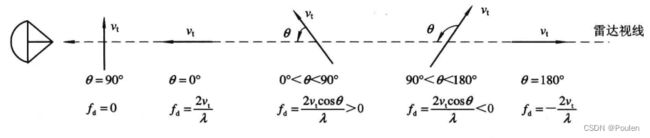 图 5
图 5
当然,对距离的连续测量也可获得距离对时间的变化率,即相对速度。但通过对动目标产生的多普勒频率的测量可获得更精确的实时相对速度,因此实际中通常采用多普勒测量的方法。任何对速度的测量都需要一定的时间。假定信噪比不变,则测量时间越长,精度就越高。总而言之,雷达通过多普勒效应产生的频率偏移来估计相对速度。
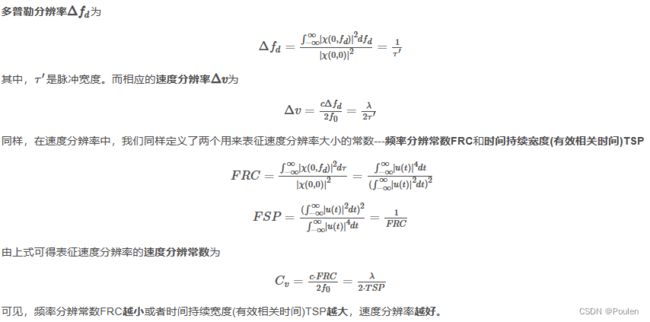
2.速度分辨率
雷达分辨率是指各种目标环境下区分两个或两个以上的邻近目标的能力。雷达分辨临近目标的能力主要从距离、速度、方位、和俯仰角四个方面考虑,其中方位和仰角的分辨率取决于波速宽度。一般雷达难以在这四维同时能分辨目标,在其中任意一维能分辨目标就认为具有目标分辨的能力。定义模糊函数:

式中τ表示两个物体的回波信号相较于发射信号的延迟时间之差,fd表示两个物体的多普勒频率之差。模糊函数是分析雷达信号和进行波形设计的有效工具,同时也是为了研究雷达分辨率。通常来说当两个同时被雷达检测到时,若这两个物体的位置、速度相差很多,那么就很容易被雷达分辨出来。若是这两个物体的位置、距离都十分近,那么对雷达本身来说就是一个挑战。若是这两个物体的位置、距离都十分相近,那么对于雷达本身来说就是个挑战。而模糊函数就是用来衡量雷达区分两个目标能力的强弱的。信号的速度分辨率由速度模糊函数决定
![]()
总结:
距离分辨率取决于信号的频率结构,为了提高距离分辨率,信号就需要有大的带宽;而速度分辨率取决于信号的时间结构,为了提高速度分辨率,号就需要有大的时宽。但是,根据雷达模糊原理可知,我们无法在不断提高的距离分辨率的同时,提高速度分辨率,中-种分辨率的提高必然会导致另一种分辨率的衰减。我们用时宽带宽积,即时宽与带宽的乘积(TB)表示信号的距离分辨率与速度分辨率的关系。对于系统设计而言,时宽带宽积越大越好,这意味着我们在提高距离分辨率的同时,不会影响速度分辨率。如何使得时宽带宽积增大,就涉及到脉内非线性相位调制技术。
3.雷达测量的理论精度
雷达测量误差的度量即精度是指测量值(估计值)与真实值之差的均方根值(RMS)。利用最大似然函数推导了距离、速度、角度的估计精度。通式表示如下:

式中,k是大约为1的常数,∆是M(距离、速度、角度)的分辨率,E是信号的能量,0是单位带宽的噪声功率。
3.1 距离测量精度
对于距离测量,若距离分辨率为∆,则距离的测量精度为:

3.2 速度测量精度
对于多普勒频率(径向速度)的测量,多普勒频率分辨率为∆(与信号持续时间成反比)。根据径向速度与多普勒频率的关系=/2,则速度测量精度为

注意:这里τ是信号持续时间,而非压缩的脉宽。
3.3 角度测量精度
对于角度的测量,k与孔径照射函数A(x)有关,Δ是方位或仰角的波束宽度。若天线的半功率波束宽度为3,则方位或仰角的测量精度为;

总结:雷达测距、测速以及测角的精度与它们的分表率成正比,分辨率越高,精度越高。
4.速度模糊及其消除方法(有的书本速度模糊也叫频闪)
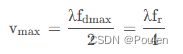
多普勒模糊也称为速度模糊,是在脉冲雷达中当发射脉冲信号频率为低或中脉冲重复频率时,由于采样频率较低而产生的不能准确测量目标多普勒频率的问题。具体原因为:多普勒维的采样为慢时间采样,采样频率为脉冲重复频率fr。由奈奎斯特采样定理可知,其采样频率fr应大于被检测目标的最大多普勒频率的两倍。如果采样频率小于运动目标产生的最大多普勒频率的两倍,则会出现对多普勒频率波形的采样率不够大,导致速度模糊,于是推出最大不模糊多普勒频率为=/2,代入多普勒计算公式=2/可得最大不模糊速度vmax为:
因此,要检测到高速目标且不产生多普勒模糊,就应该选择高的脉冲重复频率(低脉冲重复间隔)。如前所述,要提高雷达的作用距离且不产生距离模糊,就需要选择低的脉冲重复频率(高脉冲重复间隔)。显然,同时避免距离和多普勒模糊就产生了矛盾。

5.盲速
所谓盲速,是指目标虽然有一定的径向速度,但若其回波信号经过相位检波后,输出为一串等幅脉冲,与固定目标的回波相同,此时的目标运动速度称为盲速。
产生盲速的基本原因在于,脉冲工作状态是对连续发射的取样,取样后的波形和频谱均发生变化。当多普勒频率是脉冲频率的整数倍时,运动目标频谱结构与固定目标回波相同,这时无法区分运动目标与固定目标。
5.1 盲速以及消除盲速影响的方法
盲速在相邻两周期运动目标回波的相位差为2Π的整数倍,即满足
![]()
时发生。这时,0=或0=(/2),n=1时为第一盲速,表示在重复周期Tr内目标所走过的距离为半个波长。由于处于“盲速”上的运动目标,其回波的频谱结构和固定杂波相同,经过对消器将被消除。因此,动目标显示雷达在检测“盲速”范围内的运动目标时,将会产生丢失或极大降低其检测能力(这时依靠复杂目标反射谱中的其他频率分量)。如果要可靠地发现目标,应保证第一盲速大于可能出现的目标最大速度。
但在均匀重复周期时,盲速和工作波长λ以及重复频率fr的关系是确定的,这两个参数的选择还受到其它因素的限制。以3cm雷达为例,如果最大测距范围为30km,则其重复频率fr应小于5kHz,由这个参数决定的第一盲速值vr01 = (λ/2)fr=75m/s,这个速度远低于目前超音速目标的速度,也就是说,如果不采取措施,在目标运动的速度范围内,将多次碰到各个盲速点而发生丢失目标的危险。
解决盲速问题在原理上并不难,因为在产生“盲速”时,满足vr * Tr1 = n(λ/2),如果这时重复周期略为改变而成为Tr2,则vr*Tr2 ≠n(λ/2),不再满足“盲速”条件,动目标显示雷达就能检测到这一类目标。因此,当雷达工作时,采用两个以上不同重复频率交替工作(称为参差重复频率),就可以改善“盲速”对动目标显示雷达的影响。
6.解决速度模糊的速度扩展算法(适合车载毫米波雷达)
1.基于中国剩余定理速度扩展算法
2.基于多普勒相偏补偿假设
3.基于目标跟踪假设
详情:AWR1642汽车雷达的速度扩展算法研究.pdf
参考资料:
现代雷达系统分析与设计——陈伯孝等著