图像几何变换C++实现--镜像,平移,旋转,错切,缩放
转载请注明出处。
文章地址:https://blog.csdn.net/duiwangxiaomi/article/details/109532590?spm=1001.2014.3001.5501
贴一个理解仿射变换及其矩阵的网址。
仿射变换
一.图像几何变换介绍
图像的几何空间变换是图像处理中的最基础的算法,是指对原始图像按需要改变其大小、形状和位置的变化,原始图像与目标函数之间的坐标变换函数为线性函数。二维图像的基本几何变换主要包括镜像、平移、缩放、旋转、错切(偏移)等操作,上述变换又称为仿射变换,在冈萨雷斯的数字图像处理第三版的第二章就做了相关介绍,数字图像处理第三版下载地址。

下面逐一介绍上述几种放射变换。
二.变换详解
常见几种变换公式如下表所示

在进行变换时,其中镜像、平移、缩放均以图像像素坐标系(图像左上顶点为坐标系原点)进行。
对于旋转和错切一般以图像中心为原点,此时在操作中需要加上坐标系转换公式。图像坐标系和旋转坐标系如下图所示,
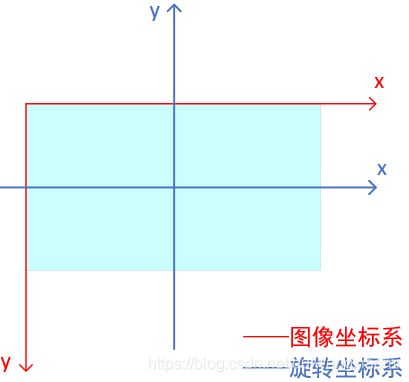
旋转和错切变换分为3步,
- 将图像坐标转换到旋转坐标系;
- 根据上述表格公式进行旋转或错切变换;
- 将旋转坐标系转换到图像坐标系;
实际实现时可将三个矩阵合并进行计算,本文的实现即采用此种方法。
变换方式
-
前向映射

-
反向映射

由于旋转、缩放、变形变换中会出现漏点、不规则点问题,如果用前向映射,会导致得到的图像中有很多黑点,对于这种情况,通常采用反向映射。
反向映射需通过插值方法决定输出图像该位置的值,因此需要选择插值算法。通常有最近邻插值、双线性插值,双三次插值等,具体的差值方法、原理及优缺点自行百度吧,我们这里采用双线性插值。
三.C++实现
实现功能:镜像、旋转、平移、缩放、错切、组合变换。利用了OpenCV的Mat,指针实现的后期有时间再补充。编程环境:VS2013+OpenCV2.4.13
#include 程序运行结果如下:
注:图片显示部分是截图效果,为了可能看起来不够标准,实际程序运行是没有问题的~
水平镜像
垂直镜像
平移

缩放

错切

旋转

组合变换

参考链接
博客及程序写作过程中难免出错,欢迎指正~