学习OpenCV3:创建一张空白的图片并画线
1、背景
在OpenCV中,图片的类型是cv::Mat,而cv::Mat可作为任意维度的数组使用。
// 默认构造函数
cv::Mat;
// 指定类型的二维数组
cv::Mat(int rows, int cols, int type);
cv::Mat(cv::Size sz, int type);
// 指定类型的二维数组,并指定初始值
cv::Mat(int rows, int cols, int type, const cv::Scalar&s);
cv::Mat(cv::Size sz, int type, const cv::Scalar&s);
// 构造一个大小为rows*cols,数据类型为type,值全为0的矩阵
cv::Mat::zeros(int rows, int cols, int type);
cv::Mat::zeros(cv::Size sz, int type);
// 构造一个大小为rows*cols,数据类型为type,值全为1的矩阵
cv::Mat::ones(int rows, int cols, int type);
cv::Mat::ones(cv::Size sz, int type);
// Mat类型
// 8,16,32,64即存储像素值的位数,位数越大,图像越清晰
// U S F即无符号数、有符号数和浮点数,opencv默认使用U,S用于视差图或深度图,F用于高清晰度图片
// C即通道数,灰度图只有1个通道,彩图有3个通道
CV_{8U,16S,16U,16S,32S,32F,64F}C{1,2,3,..n}
// 灰度图,每个像素只有1个通道,用8bit保存像素值,其范围是0~255。
CV_8UC1
// 彩色图,opecv采用BGR模式,halcon采用RGB模式
CV_8UC3
2、实现
#include
#include
#include
int main()
{
const std::string name = "image";
cv::namedWindow(name, cv::WINDOW_AUTOSIZE);
int w = 300, h = 100, y = 50;
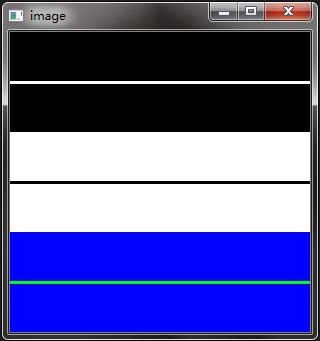
// 黑图白线
cv::Mat img1(h, w, CV_8UC1, cv::Scalar(0)); // cv::Mat img = cv::Mat::zeros(w, h, CV_8UC1);
cv::line(img1, cv::Point(0, y), cv::Point(img1.cols, y), cv::Scalar(255), 2);
// 白图黑线
cv::Mat img2(h, w, CV_8UC1, cv::Scalar(255)); // cv::Mat img = cv::Mat::ones(w, h, CV_8UC1) * 255;
cv::line(img2, cv::Point(0, y), cv::Point(img2.cols, y), cv::Scalar(0), 2);
// 蓝图绿线
cv::Mat img3(h, w, CV_8UC3, cv::Scalar(255, 0, 0));
cv::line(img3, cv::Point(0, y), cv::Point(img3.cols, y), cv::Scalar(0, 255, 0), 2);
// 三张图片合并到一张图片上显示
cv::Mat img(3 * h, w, CV_8UC3);
cv::cvtColor(img1, img(cv::Rect(0, 0, w, h)), cv::COLOR_GRAY2BGR);
cv::cvtColor(img2, img(cv::Rect(0, h, w, h)), cv::COLOR_GRAY2BGR);
img3.copyTo(img(cv::Rect(0, 2 * h, w, h)));
cv::imshow(name, img);
cv::waitKey();
return 0;
}
运行结果: