关于STARMAC旋翼机的计算系统组成分析
摘要:STARMAC,全称为“the Stanford Testbed of Autonomous Rotorcraft for Multi-Agent
Control”,是斯坦福大学为为了突破先前飞行器笨重、结构复杂的限制,开发出的自主旋翼飞行器多智能体控制测试平台,为使用集中和分散技术实现自主碰撞和避障、任务分配编队飞行等领域的最新工作铺平了道路。1 该系统的实时运转离不开强大的计算系统的支持,该平台里使用了多达三个处理器和操作系统进行分析2。本文试图分析STARMAC的计算机系统组成,并且与其实际运行功能联系起来,以期增强对相关处理器的认识。
关键词: STARMAC 嵌入式计算 处理器 协调控制
1.简介
空中多飞行器试验台通常是昂贵而复杂的平台,通常需要很大的开放空间来操作。固定翼飞机的机动性也受到限制,而传统直升机的动力和结构复杂且难以控制。为了规避这些问题,斯坦福大学开发的多飞行器试验台,提出了一种四旋翼直升机作为基础飞行器,可以在狭小的空间飞行。STARMAC是一个用于测试和验证多代理算法和控制方案的测试平台,它包括一组自主四旋翼直升机,可以使用GPS和IMU传感器跟踪指定的航路点轨迹。该试验台可以扩展到室内操作,包括基于视觉的位置和速度估计或其他室内定位系统。1
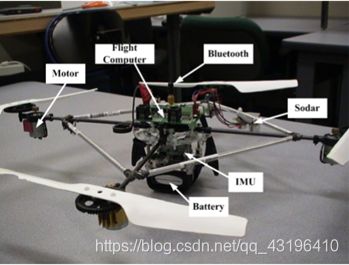
(STARMAC图片)
为了维持飞行器流畅的控制,该平台计算系统拥有三个处理器,一片是Pentium M(1.8GHz、IGRAM)处理器用于高级飞行控制,一片是Intel
PXA270(400MHz64MB RAM)用于导航,一片是Atmel Mega 128
用于基本飞行控制。STARMAC是多传感器数据融合控制的典范,其飞行控制系统融合了包括惯性测量单元、GPS、红外距离传感器和超声波雷达等的多个传感器数据。2
本文第二部分将分别介绍这几款处理器各自特点以及应用场景,第三部分试图剖析这几款处理器在STARMAC平台里发挥的作用。第四部分为总结与讨论
2.三款处理器特点与应用
2.1 Pentium M

M 是intel公司2009年基于先前开发的Pentium
III产品,经过针对移动市场的改造得到的产品。该处理器和先前产品相比,在提升性能的基础上还减少了能量消耗。3其性能参数如图:
该芯片具有以下特点:
●管线与技术:处理器的管线大约在12-14级左右,不仅可以提升处理器的时钟频率,也用于增强Pentium M处理器中的微操作融合技术。
●技术改进:增加了循环识别逻辑和改进了间接分支预测,预测精度大为提高,管线全速运行的情况较以前增加,执行单元空闲等待的情况较先前变少,使得运算速度,特别是浮点运算速度大大提高。
●堆栈管理器:使专用堆栈管理器和堆栈指针寄存器一起工作,堆栈管理器能够识别,像PUSH,POP,CALL和RET这样的指令,在它们经过解码器,但到达执行单元以前预处理它们,从而降低执行单元的负载。能够在提升性能的同时,进一步控制发热量和能耗。
●处理器总线:用Quad Pumped Bus总线,和Pentium 4在总线之间的兼容,奠定移动处理器在桌面电脑中应用的基础。
●节能措施:根据不同的任务,设定合适的工作频率和电压。Pentium
M处理器中的speedstep技术已历三代,能够提供7种不同的状态,能够根据处理器的工作量自动降低频率和电压,而且不同模式之间的转化迅速,不会给用户带来丝毫察觉4
2.2 Intel PXA270
Intel PXA270微处理器芯片就是一款集成32位lntel XScale处理器核、多通信通道、LCD控制器、増強型存储控制器和PCMCIA/CF控制器以及通用l/O口的高度集成的立用处理器。5英特尔公司于2003年底推出了该系列嵌入式处理器,PXA27x系列嵌入式处理器基于ARMv5E的Xscale核心,最高频率可达624MHz,它的扩展接口相当丰富,有SD/SDIO/MMC、CF/PCMCIA、CMOS/CCD CAMERA、蓝牙、USB1.1、OTG等。同样的具有wireless MMX技术和SpeedStep动态电源管理技术。在系统完全空闲时,PXA270可以运行在26MHz的主频下!此时它的功耗将低于0.1毫安!5

(pix270 结构框图)7
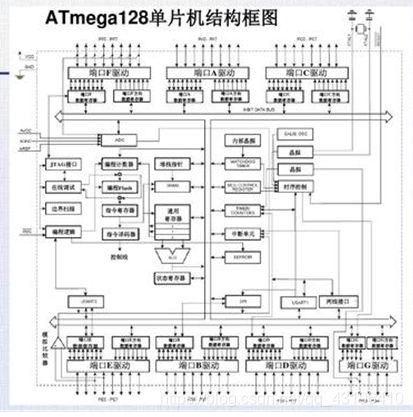
2.3 Atmel Mega 128
ATmega128是ATMEL公司的 8位系列单片机的最高配置的一款单片机,稳定性极高,被广泛的应用在了汽车电车管理、门禁系统、遥控器、智能家居、以及计量电表等领域。
Atmega128A是AVR8位微处理器芯片,采用先进的RISC结构,采用AVR内核,拥有16MHz工作频率,工作电压为2.7-5.5V。8 该处理器具有以下特点:
● 高性能、低功耗的 AVR 8 位微处理器
●先进的 RISC 结构
●非易失性的程序和数据存储器
●JTAG 接口( 与IEEE 1149.1 标准兼容)9
10
3.各款处理器在STARMAC协调作用
STARMACI机身使用碳纤材料制作。该系统利用PXA270嵌入式ARM板,负责传感器数据的采集处理以及控制算法的运行;下位机采用 Atmega128 单片机负责实时控制以及输出PWM波控制电机。机载传感器系统包括Microstrain3DMG-X1惯性导航单元(IMU),可输出三轴姿态角、角速度和线加速度,姿态角精度为+2”,工作频率可达100Hz; 超声波传感器型号为Mini-AE, 最远测量距离可达10m,工作频率10Hz到50Hz;定位单元为Novatel
Superstar II 差分GPS单元,能测量无人机的位置和线速度,位置精度可达1-2cm,工作频率10Hz。12
由运行方框图可以看到,激光雷达(LIDAR)、Stereo Cam等探测部件将数据传给Pentium M处理;而Atmel Mega则负责惯性导航单元(IMU)、超声波传感器(SRF08)、迷你AE传感器和追踪器等和飞行器控制相关的部件;而PIX部件和WiFi连接较为紧密。三种处理器分别负责飞行器控制,导航等运算,并且将数据进行交叉融合,这里边的算法目前比较难以理解,但是无疑很好的保证了无人机控制具有很好的稳定性和鲁棒性。

11
4讨论与总结
在调查STARMAC上的芯片上,发现芯片升级都有一个共同的特点:在提升运算速度的基础上尽可能的减少能量消耗。由于运算任务强度不会一成不变,在强度不太大时候可以适当降低运算频率,从而减少散热量,使运行更为流畅。因此芯片架构的设计也需要考虑到各方面因素,利用每个部件自身的特点,使得整体效益最大化。
回到SRTARMAC架构本身,个人认为做的很好的一点是融合。一是数据融合,大量的传感器测量空程、高度、加速度等物理量,将这些数据经过处理后融合运用,为飞机的运动控制给出相应的决策。二是芯片融合,其计算机系统运用三块不同的芯片,三芯片各有其特色,该架构很好地利用了其长处完成对应的工作,并且最大程度减少能量消耗。
文献参考:
【1】G.
M. Hoffmann, S. L. Waslander, and D. Dostal, The Stanford Testbed of Autonomous
Rotorcraft for Multi Agent Control(STARMAC), Proceedings of the2004 Conference
on Digital Avonics Systems, 2004, pp:l-10
【2】https://max.book118.com/html/2018/0119/149598014.shtm
【3】https://iask.sina.com.cn/b/iRYLIjpvPePd.html
【4】百度百科词条“PentiumM处理器“
【5】http://www.dzsc.com/data/2011-9-4/97839.html
【6】百度百科词条“PXA270“
【7】
https://wenku.baidu.com/view/32eb312800f69e3143323968011ca300a7c3f617.html
【8】https://blog.csdn.net/c_seser/article/details/72233225
【9】百度百科词条“Atmega128“
【10】
https://image.baidu.com/search/detail?ct=503316480&z=0&ipn=d&word=Atmega128&step_word=&hs=0&pn=16&spn=0&di=1100&pi=0&rn=1&tn=baiduimagedetail&is=0%2C0&istype=0&ie=utf-8&oe=utf-8&in=&cl=2&lm=-1&st=undefined&cs=3473816125%2C1619549525&os=2314450460%2C2064988888&simid=3397260944%2C155406440&adpicid=0&lpn=0&ln=711&fr=&fmq=1569728342463_R&fm=&ic=undefined&s=undefined&hd=undefined&latest=undefined©right=undefined&se=&sme=&tab=0&width=undefined&height=undefined&face=undefined&ist=&jit=&cg=&bdtype=0&oriquery=&objurl=http%3A%2F%2Fwww.wendangwang.com%2Fpic%2F095f6e4055ffacce4adec9e7%2F9-810-jpg_6-1080-0-0-1080.jpg&fromurl=ippr_z2C%24qAzdH3FAzdH3Fooo_z%26e3Bojg1wg2owg2_z%26e3Bv54AzdH3F15vAzdH3Falcumj9accuuwvvj9w1jvlj0AzdH3Fl&gsm=&rpstart=0&rpnum=0&islist=&querylist=&force=undefined
【11】浙江大学“ 嵌入式计算导论课程课件“第三章
嵌入式处理器”第13页
【12】李浩涛 天津大学硕士学位论文“基于四旋翼无人机传感器数据采集和处理的研究”,2011-2012