第2章 Python 数字图像处理(DIP) --数字图像基础5 -- 算术运算、集合、几何变换、傅里叶变换等
目录
- 数字图像处理所有的基本数字工具介绍
-
-
- 算术运算
- 集合运算和逻辑运算
- 空间运算
- 向量与矩阵运算
- 图像变换
- 图像和随机变量
-
数字图像处理所有的基本数字工具介绍
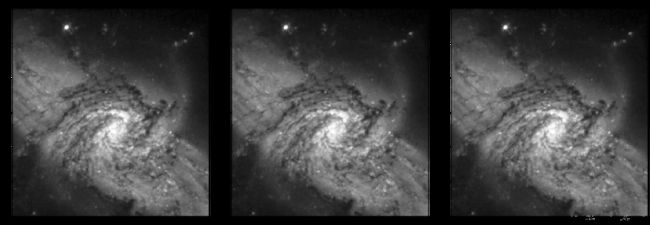
算术运算
# 相加
img_ori = cv2.imread("DIP_Figures/DIP3E_Original_Images_CH02/Fig0226(galaxy_pair_original).tif", 0)
dst = np.zeros_like(img_ori, dtype=float)
for i in range(100):
dst += img_ori
dst_1000 = np.zeros_like(img_ori, dtype=float)
for i in range(1000):
dst_1000 += img_ori
plt.figure(figsize=(24, 8))
plt.subplot(1,3,1), plt.imshow(img_ori, 'gray'), plt.title("Original"),# plt.xticks([]), plt.yticks([])
plt.subplot(1,3,2), plt.imshow(dst, 'gray'), plt.title("100"),# plt.xticks([]), plt.yticks([])
plt.subplot(1,3,3), plt.imshow(dst_1000, 'gray'), plt.title("1000"),# plt.xticks([]), plt.yticks([])
plt.tight_layout()
plt.show()
def set_bin_last_0(x):
"""
这是把最低位为1的有效位置为0, 如:[1, 0, 0, 1, 0, 0] -> [1, 0, 0, 0, 0, 0]
"""
bin_list = list(bin(x)[2:])
for i in range(len(bin_list)-1, -1, -1):
if int(bin_list[i]) == 1:
bin_list[i] = '0'
break
b = "".join(bin_list)
return int(b, 2)
def set_bin_last_0(x):
"""
这是把最后一位是1的置为0
"""
bin_tmp = bin(x)[2:]
if int(bin_tmp[-1]) == 1:
string = str(int(bin_tmp) - 1)
return int(string, 2)
else:
return x
# 使用图像想减比较图像
img_ori = cv2.imread("DIP_Figures/DIP3E_Original_Images_CH02/Fig0227(a)(washington_infrared).tif", 0)
img_ori = np.uint8(normalize(img_ori) * 255)
height, width = img_ori.shape[:2]
dst = np.zeros([height, width], dtype=np.uint8)
for h in range(height):
for w in range(width):
dst[h, w] = set_bin_last_0(img_ori[h, w])
dst = np.uint8(normalize(dst) * 255)
img_diff = img_ori - dst
img_diff = np.uint8(normalize(img_diff) * 255)
plt.figure(figsize=(24, 8))
plt.subplot(1,3,1), plt.imshow(img_ori, 'gray'), plt.title("Original"),# plt.xticks([]), plt.yticks([])
plt.subplot(1,3,2), plt.imshow(dst, 'gray'), plt.title("Set bin last 0"),# plt.xticks([]), plt.yticks([])
plt.subplot(1,3,3), plt.imshow(img_diff, 'gray'), plt.title("Difference"),# plt.xticks([]), plt.yticks([])
plt.tight_layout()
plt.show()
# 使用图像相减比较图像,得到的结果跟书上相去甚远,还得继续研究
img_a = cv2.imread("DIP_Figures/DIP3E_Original_Images_CH02/Fig0228(a)(angiography_mask_image).tif", 0)
img_b = cv2.imread("DIP_Figures/DIP3E_Original_Images_CH02/Fig0228(b)(angiography_live_ image).tif", 0)
img_a = np.uint8(normalize(img_a) * 255)
img_b = np.uint8(normalize(img_b) * 255)
img_diff = (img_a - img_b)
# 锐化算子,锐化内核强调在相邻的像素值的差异,这使图像看起来更生动
kernel_shapen = np.array((
[0,-1,0],
[-1,5,-1],
[0,-1,0]), np.int8)
imgkernel_shapen = cv2.filter2D(img_b, -1, kernel_shapen)
img_diff_sha = imgkernel_shapen - img_a
plt.figure(figsize=(12, 12))
plt.subplot(2,2,1), plt.imshow(img_a, 'gray'), plt.title("Mask"),# plt.xticks([]), plt.yticks([])
plt.subplot(2,2,2), plt.imshow(img_b, 'gray'), plt.title("Live"),# plt.xticks([]), plt.yticks([])
plt.subplot(2,2,3), plt.imshow(img_diff, 'gray'), plt.title("Difference"),# plt.xticks([]), plt.yticks([])
plt.subplot(2,2,4), plt.imshow(img_diff_sha, 'gray'), plt.title("Difference"),# plt.xticks([]), plt.yticks([])
plt.tight_layout()
plt.show()

# 使用图像相乘/相除校正阴影和模板
img_a = cv2.imread("DIP_Figures/DIP3E_Original_Images_CH02/Fig0229(a)(tungsten_filament_shaded).tif", 0)
img_b = cv2.imread("DIP_Figures/DIP3E_Original_Images_CH02/Fig0229(b)(tungsten_sensor_shading).tif", 0)
img_dst = img_a / img_b
plt.figure(figsize=(18, 8))
plt.subplot(1,3,1), plt.imshow(img_a, 'gray'), plt.title("Image A"), plt.xticks([]), plt.yticks([])
plt.subplot(1,3,2), plt.imshow(img_b, 'gray'), plt.title("Image B"), plt.xticks([]), plt.yticks([])
plt.subplot(1,3,3), plt.imshow(img_dst, 'gray'), plt.title("Calibration"), plt.xticks([]), plt.yticks([])
plt.tight_layout()
plt.show()

def generatePattern(CheckerboardSize, Nx_cor, Ny_cor):
'''
自定义生成棋盘
:param CheckerboardSize: 棋盘格大小,此处100即可
:param Nx_cor: 棋盘格横向内角数
:param Ny_cor: 棋盘格纵向内角数
:return:
'''
black = np.zeros((CheckerboardSize, CheckerboardSize, 3), np.uint8)
white = np.zeros((CheckerboardSize, CheckerboardSize, 3), np.uint8)
black[:] = [0, 0, 0] # 纯黑色
white[:] = [255, 255, 255] # 纯白色
black_white = np.concatenate([black, white], axis=1)
black_white2 = black_white
white_black = np.concatenate([white, black], axis=1)
white_black2 = white_black
# 横向连接
if Nx_cor % 2 == 1:
for i in range(1, (Nx_cor+1) // 2):
black_white2 = np.concatenate([black_white2, black_white], axis=1)
white_black2 = np.concatenate([white_black2, white_black], axis=1)
else:
for i in range(1, Nx_cor // 2):
black_white2 = np.concatenate([black_white2, black_white], axis=1)
white_black2 = np.concatenate([white_black2, white_black], axis=1)
black_white2 = np.concatenate([black_white2, black], axis=1)
white_black2 = np.concatenate([white_black2, white], axis=1)
jj = 0
black_white3 = black_white2
for i in range(0, Ny_cor):
jj += 1
# 纵向连接
if jj % 2 == 1:
black_white3 = np.concatenate((black_white3, white_black2)) # =np.vstack((img1, img2))
else:
black_white3 = np.concatenate((black_white3, black_white2)) # =np.vstack((img1, img2))
return black_white3
# 使用图像相乘/相除校正阴影和模板
img_b = cv2.imread("DIP_Figures/DIP3E_Original_Images_CH02/Fig0229(b)(tungsten_sensor_shading).tif", 0)
check = generatePattern(150, 6, 10)
img_temp = check[..., 0][:img_b.shape[0], :img_b.shape[1]].astype(float)
img_temp = img_temp * img_b
img_dst = img_temp / img_b
plt.figure(figsize=(20, 8))
plt.subplot(1,3,1), plt.imshow(img_temp, 'gray'), plt.title("Image A"), plt.xticks([]), plt.yticks([])
plt.subplot(1,3,2), plt.imshow(img_b, 'gray'), plt.title("Image B"), plt.xticks([]), plt.yticks([])
plt.subplot(1,3,3), plt.imshow(img_dst, 'gray'), plt.title("Calibration"), plt.xticks([]), plt.yticks([])
plt.tight_layout()
plt.show()

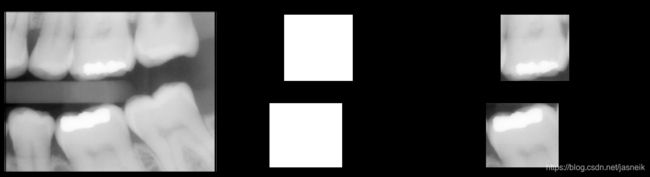
# 使用图像相乘/相除校正阴影和模板
img_a = cv2.imread("DIP_Figures/DIP3E_Original_Images_CH02/Fig0230(a)(dental_xray).tif", 0)
img_b = cv2.imread("DIP_Figures/DIP3E_Original_Images_CH02/Fig0230(b)(dental_xray_mask).tif", 0)
img_temp = normalize(img_b)
img_dst = img_a * img_temp
plt.figure(figsize=(18, 8))
plt.subplot(1,3,1), plt.imshow(img_a, 'gray'), plt.title("Image A"), plt.xticks([]), plt.yticks([])
plt.subplot(1,3,2), plt.imshow(img_b, 'gray'), plt.title("Image B"), plt.xticks([]), plt.yticks([])
plt.subplot(1,3,3), plt.imshow(img_dst, 'gray'), plt.title("Calibration"), plt.xticks([]), plt.yticks([])
plt.tight_layout()
plt.show()
注意
大多数图像是使用不比特显示的(24比特彩色图像由三个不同的8比特通道组成)。因此,我们期望图像的灰度值范围为0 ~ 255。当图像心师傅晚上他啊如TIFF或JPEG存储时,图像的灰度值会自动转换到这一范围。当图像的灰度超过这一允许范围时就会进行剪切或缩放。许多软件 包在把图像转换为8比特时,只是简单地把所有负值转换为0,而把超过这一限值的值转换为255。已知一个或多个算术(或其他)运算产生的数字图像 g g g时,保证将一个值的全部范围“捕获”到某个固定比特的方法如下。
g m = g − g m i n (2.31) g_{m} = g - g_{min} \tag{2.31} gm=g−gmin(2.31)
然后执行
g s = K [ g m / g m a x ] (2.32) g_{s} = K[g_{m} / g_{max}] \tag{2.32} gs=K[gm/gmax](2.32)
它生成一幅缩放的图像 g s g_{s} gs,该图像的值域为[0, K]。处理8比特图像时令K=255。执行除法运算时,需要在加上一个较小的数,以免费出现 除以0的现象。
集合运算和逻辑运算
-
补集
令灰度图像的元素由集合 A A A表示,集合 A A A的元素形式是三元组 ( x , y , z ) (x, y, z) (x,y,z),其中 x 和 y x和y x和y是空间坐标, z z z是灰度值。我们将集合 A A A的补集定义为
A c = { ( x , y , K − z ) ∣ ( x , y , z ) ∈ A } A^c = \{ (x, y, K-z) | (x, y, z) \in A \} Ac={(x,y,K−z)∣(x,y,z)∈A}
它是集合 A A A中灰度已送去常数K的像素集合。这个常数等于图像中的最大灰度值$2^k -1 , 其 中 ,其中 ,其中k 是 用 于 表 示 是用于表示 是用于表示z$的比特数。 -
并集
元素数量是每个人两个灰度集合A和B的并集定义为:
A ⋃ B = { max ( a , b ) ∣ a ∈ A , b ∈ B } A \bigcup B = \{\text{max}(a, b) | a\in A, b \in B \} A⋃B={max(a,b)∣a∈A,b∈B}
# 补集,并集
img_a = cv2.imread("DIP_Figures/DIP3E_Original_Images_CH02/Fig0232(a)(partial_body_scan).tif", 0)
img_b = 255 - img_a
img_dst = np.zeros(img_a.shape[:2], dtype=np.float)
height, width = img_a.shape[:2]
z = 3 * np.sum(img_a) / (img_a.size)
for i in range(height):
for j in range(width):
img_dst[i, j] = max(img_a[i, j], z)
plt.figure(figsize=(15, 10))
plt.subplot(1,3,1), plt.imshow(img_a, 'gray'), plt.title("Image A"), plt.xticks([]), plt.yticks([])
plt.subplot(1,3,2), plt.imshow(img_b, 'gray'), plt.title("Image B"), plt.xticks([]), plt.yticks([])
plt.subplot(1,3,3), plt.imshow(img_dst, 'gray'), plt.title("Calibration"), plt.xticks([]), plt.yticks([])
plt.tight_layout()
plt.show()

逻辑运算
AND、OR、NOT、XOR
def b1_and_b2(img_b1, img_b2):
"""
input two [0, 1] images, return a [0, 1] image of both images AND operation
"""
height, width = img_b1.shape[:2]
img_dst = np.zeros([height, width], np.uint)
for h in range(height):
for w in range(width):
img_dst[h, w] = img_b1[h, w] and img_b2[h, w]
return img_dst
def b1_or_b2(img_b1, img_b2):
"""
input two [0, 1] images, return a [0, 1] image of both images OR operation
"""
height, width = img_b1.shape[:2]
img_dst = np.zeros([height, width], np.uint)
for h in range(height):
for w in range(width):
img_dst[h, w] = img_b1[h, w] or img_b2[h, w]
return img_dst
def b1_xor_b2(img_b1, img_b2):
"""
input two [0, 1] images, return a [0, 1] image of both images XOR operation
"""
height, width = img_b1.shape[:2]
img_dst = np.zeros([height, width], np.uint)
for h in range(height):
for w in range(width):
img_dst[h, w] = img_b1[h, w] ^ img_b2[h, w]
return img_dst
# 逻辑运行
height, width = 300, 400
mid_h, mid_w = height//2 + 1, width//2 + 1
img_b1 = np.zeros([height, width], dtype=np.uint)
img_b1[100:200, 50:250] = 1
img_b2 = np.zeros_like(img_b1, dtype=np.uint)
img_b2[50:150, 150:300] = 1
img_notb1 = normalize(~(img_b1)) # np.invert
img_b1_and_b2 = b1_and_b2(img_b1, img_b2) # b1 AND b2
img_b1_or_b2 = b1_or_b2(img_b1, img_b2) # b1 OR b2
img_not_b2 = np.uint(normalize(~(img_b2)) + 0.1) # First NOT img_b2, but return[-2, 0], normalize to [0. 0.9999], +0.1 then conver to [0, 1]
img_b1_and_not_b2 = b1_and_b2(img_b1, img_not_b2) # img_b1 AND NOT(img_b2)
img_b1_xor_b2 = b1_xor_b2(img_b1, img_b2) # b2 XOR b2
plt.figure(figsize=(7.2, 10))
plt.subplot(5, 3, 2), plt.imshow(img_b1, 'gray'), plt.title('B1'), plt.xticks([]), plt.yticks([])
plt.subplot(5, 3, 3), plt.imshow(img_notb1, 'gray'), plt.title('NOT(B1)'), plt.xticks([]), plt.yticks([])
plt.subplot(5, 3, 4), plt.imshow(img_b1, 'gray'), plt.title('B1'), plt.xticks([]), plt.yticks([])
plt.subplot(5, 3, 5), plt.imshow(img_b2, 'gray'), plt.title('B2'), plt.xticks([]), plt.yticks([])
plt.subplot(5, 3, 6), plt.imshow(img_b1_and_b2, 'gray'), plt.title('B1 AND B2'), plt.xticks([]), plt.yticks([])
plt.subplot(5, 3, 7), plt.imshow(img_b1, 'gray'), plt.title('B1'), plt.xticks([]), plt.yticks([])
plt.subplot(5, 3, 8), plt.imshow(img_b2, 'gray'), plt.title('B2'), plt.xticks([]), plt.yticks([])
plt.subplot(5, 3, 9), plt.imshow(img_b1_or_b2, 'gray'), plt.title('B1 OR B2'), plt.xticks([]), plt.yticks([])
plt.subplot(5, 3, 10), plt.imshow(img_b1, 'gray'), plt.title('B1'), plt.xticks([]), plt.yticks([])
plt.subplot(5, 3, 11), plt.imshow(img_not_b2, 'gray'), plt.title('NOT(B2)'), plt.xticks([]), plt.yticks([])
plt.subplot(5, 3, 12), plt.imshow(img_b1_and_not_b2, 'gray'), plt.title('B1 AND [NOT B2]'), plt.xticks([]), plt.yticks([])
plt.subplot(5, 3, 13), plt.imshow(img_b1, 'gray'), plt.title('B1'), plt.xticks([]), plt.yticks([])
plt.subplot(5, 3, 14), plt.imshow(img_b2, 'gray'), plt.title('B2'), plt.xticks([]), plt.yticks([])
plt.subplot(5, 3, 15), plt.imshow(img_b1_xor_b2, 'gray'), plt.title('B1 XOR B2'), plt.xticks([]), plt.yticks([])
plt.tight_layout()
plt.show()

空间运算
空间运算直接对图像的像素执行,分三类
-
(1)单像素运算;
-
(2)邻域运算;
-
(3)几何空间变换。
-
单像素运算
-
用一个变换同函数 T T T改变图像各个像素的灰度,z是原图像中的像素的灰度,s是处理后图像中对应像素(映射)灰度:
s = T ( z ) (2.42) s = T(z) \tag{2.42} s=T(z)(2.42) -
邻域运算
-
邻域处理在输出图像 g g g中相同坐标处生成一个对应的像素,这个像素的值由输入图像中邻域尚未确认规定运算和集合 S x y S_{xy} Sxy中的坐标确。如算术平均等。
g ( x , y ) = 1 m n ∑ ( r , c ) ∈ S x y f ( r , c ) (2.43) g(x, y) = \frac{1}{mn}\sum_{(r,c)\in S_{xy}} f(r, c) \tag{2.43} g(x,y)=mn1(r,c)∈Sxy∑f(r,c)(2.43) -
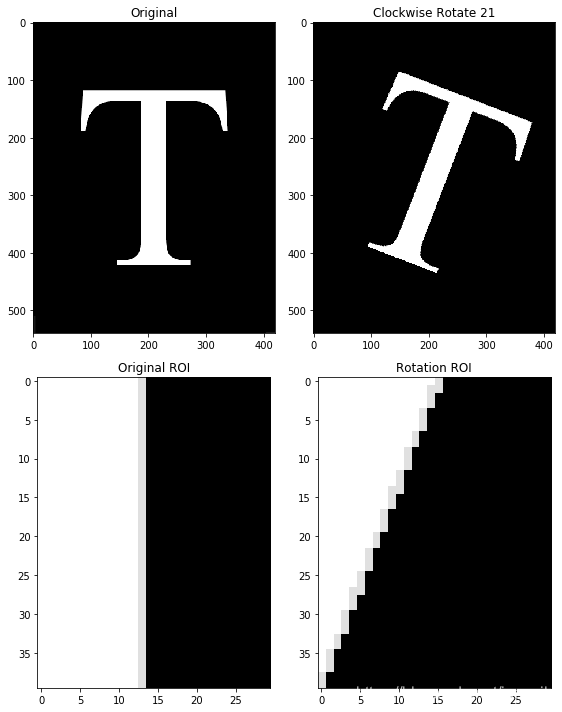
几何变换
-
几何变换改变图像中像素的空间排列。这些变换通常称为橡皮膜变换。数字图像的几何变换由两种基本运算组成:
- (1)坐标的空间变换;
- (2)灰度内插,即为空间变换后的像素赋灰度值。
-
仿射变换,包括绽放变换、平移变换、旋转变换和剪切变换。
[ x ′ y ′ ] = T [ x y ] = [ t 11 t 12 t 21 t 22 ] [ x y ] (2.44) \begin{bmatrix} x' \\ y' \end{bmatrix} = T \begin{bmatrix} x \\ y \end{bmatrix} = \begin{bmatrix} t_{11} &t_{12} \\ t_{21} & t_{22} \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix} \tag{2.44} [x′y′]=T[xy]=[t11t21t12t22][xy](2.44) -
采用如下$3 \times 3 $矩阵,用齐次坐标来表示所有4个仿射变换是可能的
[ x ′ y ′ 1 ] = A [ x y 1 ] = [ a 11 a 12 a 13 a 21 a 22 a 23 0 0 1 ] [ x y 1 ] (2.45) \begin{bmatrix} x' \\ y' \\1 \end{bmatrix} = A \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} = \begin{bmatrix} a_{11} & a_{12} & a_{13} \\ a_{21} & a_{22} & a_{23} \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} \tag{2.45} ⎣⎡x′y′1⎦⎤=A⎣⎡xy1⎦⎤=⎣⎡a11a210a12a220a13a231⎦⎤⎣⎡xy1⎦⎤(2.45)
仿射变换矩阵A
-
恒等 x ′ = x , y ′ = y x' = x, y'=y x′=x,y′=y
[ 1 0 0 0 1 0 0 0 1 ] \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} ⎣⎡100010001⎦⎤ -
缩入/反射(对于反射,将一个比例因子设为-1,而将另一个比例因子设为0) x ′ = c x x , y ′ = c x y x' = c_{x} x, y'= c_{x} y x′=cxx,y′=cxy
[ c x 0 0 0 c y 0 0 0 1 ] \begin{bmatrix} c_{x} & 0 & 0 \\ 0 & c_{y} & 0 \\ 0 & 0 & 1 \end{bmatrix} ⎣⎡cx000cy0001⎦⎤ -
关于原点旋转 x ′ = x c o s θ − y s i n θ , y ′ = x s i n θ + y c o s θ x' = x cos \theta - y sin \theta, y' = x sin \theta + y cos \theta x′=xcosθ−ysinθ,y′=xsinθ+ycosθ
[ c o s θ − s i n θ 0 s i n θ c o s θ 0 0 0 1 ] \begin{bmatrix} cos \theta & - sin \theta & 0 \\ sin \theta & cos \theta & 0 \\ 0 & 0 & 1 \end{bmatrix} ⎣⎡cosθsinθ0−sinθcosθ0001⎦⎤ -
平移 x ′ = x + t x , y ′ = y + t y x' = x + t_{x}, y'= y + t_{y} x′=x+tx,y′=y+ty
[ 1 0 t x 0 1 t y 0 0 1 ] \begin{bmatrix} 1 & 0 & t_{x} \\ 0 & 1 & t_{y} \\ 0 & 0 & 1 \end{bmatrix} ⎣⎡100010txty1⎦⎤ -
垂直剪切 x ′ = x + s v y , y ′ = y x' = x + s_{v} y, y'= y x′=x+svy,y′=y
[ 1 s v 0 0 1 0 0 0 1 ] \begin{bmatrix} 1 & s_{v} & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} ⎣⎡100sv10001⎦⎤ -
水平剪切 x ′ = x y , y ′ = y + s h x' = x y, y'= y + s_{h} x′=xy,y′=y+sh
[ 1 0 0 s h 1 0 0 0 1 ] \begin{bmatrix} 1 & 0 & 0 \\ s_{h} & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} ⎣⎡1sh0010001⎦⎤ -
正向映射
-
它包括扫描输入图像的像素,并在每个位置 ( x , y ) (x, y) (x,y)用式(2.45)直接计算输出图像中相应像素的空间位置 ( x ′ , y ′ ) (x', y') (x′,y′)
-
正向映射的问题是,输入图像中的两个或多个像素可变换到输出图像中的同一位置,这就产生了如何把多个输出值合并为单个输出像素值的问题。
-
另外,某些输出位置可能根本没有要赋值的像素。
-
反射映射
-
它扫描输出像素的位置,并在每个位置 ( x ′ , y ′ ) (x', y') (x′,y′)使用 ( x , y ) = A − 1 ( x ′ , y ′ ) (x, y) = A^{-1}(x', y') (x,y)=A−1(x′,y′)计算输入图像中的相应位置,然后在最近的输入像素之间进行内插,求出输出像素的灰度
-
反向映射要比正向映射更有效
# 单像素运算 --> 负图像 : 255 - img
img = cv2.imread('DIP_Figures/DIP3E_Original_Images_CH02/Fig0220(a)(chronometer 3692x2812 2pt25 inch 1250 dpi).tif', 0)
img = img[1100:3500, 200:2600]
x = np.arange(255)
y = 255 - x
img_inv = 255 - img
plt.figure(figsize=(18, 6))
plt.subplot(131), plt.imshow(img, 'gray'), plt.title('Original'), #plt.xticks([]), plt.yticks([])
plt.subplot(132), plt.plot(x, y), plt.title('s = T(z)'), plt.xticks([0, 255]), plt.yticks([0, 255])
plt.subplot(133), plt.imshow(img_inv, 'gray'), plt.title('255 - Image'), #plt.xticks([]), plt.yticks([])
plt.tight_layout()
plt.show()

import numpy as np
def arithmentic_mean(image, kernel):
"""
caculate image arithmetic mean
:param image: input image
:param kernel: input kernel
:return: image after convolution
"""
img_h = image.shape[0]
img_w = image.shape[1]
m = kernel.shape[0]
n = kernel.shape[1]
# padding
padding_h = int((m -1)/2)
padding_w = int((n -1)/2)
image_pad = np.pad(image.copy(), (padding_h, padding_w), mode="constant", constant_values=0)
image_convol = image.copy().astype(np.float)
for i in range(padding_h, img_h + padding_h):
for j in range(padding_w, img_w + padding_w):
temp = np.sum(image_pad[i-padding_h:i+padding_h+1, j-padding_w:j+padding_w+1] * kernel)
image_convol[i - padding_h][j - padding_w] = 1/(m * n) * temp
return image_convol
# 算术平均,m = n = 41
img_ori = cv2.imread('DIP_Figures/DIP3E_Original_Images_CH02/Fig0235(c)(kidney_original).tif', 0) #直接读为灰度图像
m, n = 41, 41
mean_kernal = np.ones([m, n])
mean_kernal = mean_kernal / mean_kernal.size
img_dst = arithmentic_mean(img_ori, kernel=mean_kernal)
img_dst = np.uint8(normalize(img_dst) * 255)
img_cv2_mean = cv2.filter2D(img_ori, ddepth= -1, kernel=mean_kernal)
plt.figure(figsize=(24, 12))
plt.subplot(131), plt.imshow(img_ori, 'gray'), plt.title('Original')
plt.subplot(132), plt.imshow(img_dst, 'gray'), plt.title('Self Mean')
plt.subplot(133), plt.imshow(img_cv2_mean, 'gray'), plt.title('CV2 mean')
plt.tight_layout()
plt.show()

def rotate_image(img, angle=45):
height, width = img.shape[:2]
if img.ndim == 3:
channel = 3
else:
channel = None
if int(angle / 90) % 2 == 0:
reshape_angle = angle % 90
else:
reshape_angle = 90 - (angle % 90)
reshape_radian = np.radians(reshape_angle) # 角度转弧度
# 三角函数计算出来的结果会有小数,所以做了向上取整的操作。
new_height = int(np.ceil(height * np.cos(reshape_radian) + width * np.sin(reshape_radian)))
new_width = int(np.ceil(width * np.cos(reshape_radian) + height * np.sin(reshape_radian)))
if channel:
new_img = np.zeros((new_height, new_width, channel), dtype=np.uint8)
else:
new_img = np.zeros((new_height, new_width), dtype=np.uint8)
radian = np.radians(angle)
cos_radian = np.cos(radian)
sin_radian = np.sin(radian)
# dx = 0.5 * new_width + 0.5 * height * sin_radian - 0.5 * width * cos_radian
# dy = 0.5 * new_height - 0.5 * width * sin_radian - 0.5 * height * cos_radian
# ---------------前向映射--------------------
# for y0 in range(height):
# for x0 in range(width):
# x = x0 * cos_radian - y0 * sin_radian + dx
# y = x0 * sin_radian + y0 * cos_radian + dy
# new_img[int(y) - 1, int(x) - 1] = img[int(y0), int(x0)] # 因为整体映射的结果会比偏移一个单位,所以这里x,y做减一操作。
# ---------------后向映射--------------------
dx_back = 0.5 * width - 0.5 * new_width * cos_radian - 0.5 * new_height * sin_radian
dy_back = 0.5 * height + 0.5 * new_width * sin_radian - 0.5 * new_height * cos_radian
for y in range(new_height):
for x in range(new_width):
x0 = x * cos_radian + y * sin_radian + dx_back
y0 = y * cos_radian - x * sin_radian + dy_back
if 0 < int(x0) <= width and 0 < int(y0) <= height: # 计算结果是这一范围内的x0,y0才是原始图像的坐标。
new_img[int(y), int(x)] = img[int(y0) - 1, int(x0) - 1] # 因为计算的结果会有偏移,所以这里做减一操作。
# # ---------------双线性插值--------------------
# if channel:
# fill_height = np.zeros((height, 2, channel), dtype=np.uint8)
# fill_width = np.zeros((2, width + 2, channel), dtype=np.uint8)
# else:
# fill_height = np.zeros((height, 2), dtype=np.uint8)
# fill_width = np.zeros((2, width + 2), dtype=np.uint8)
# img_copy = img.copy()
# # 因为双线性插值需要得到x+1,y+1位置的像素,映射的结果如果在最边缘的话会发生溢出,所以给图像的右边和下面再填充像素。
# img_copy = np.concatenate((img_copy, fill_height), axis=1)
# img_copy = np.concatenate((img_copy, fill_width), axis=0)
# for y in range(new_height):
# for x in range(new_width):
# x0 = x * cos_radian + y * sin_radian + dx_back
# y0 = y * cos_radian - x * sin_radian + dy_back
# x_low, y_low = int(x0), int(y0)
# x_up, y_up = x_low + 1, y_low + 1
# u, v = np.modf(x0)[0], np.modf(y0)[0] # 求x0和y0的小数部分
# x1, y1 = x_low, y_low
# x2, y2 = x_up, y_low
# x3, y3 = x_low, y_up
# x4, y4 = x_up, y_up
# if 0 < int(x0) <= width and 0 < int(y0) <= height:
# pixel = (1 - u) * (1 - v) * img_copy[y1, x1] + (1 - u) * v * img_copy[y2, x2] + u * (1 - v) * img_copy[y3, x3] + u * v * img_copy[y4, x4] # 双线性插值法,求像素值。
# new_img[int(y), int(x)] = pixel
return new_img
# 几何空间变换
img_ori = cv2.imread('DIP_Figures/DIP3E_Original_Images_CH02/Fig0236(a)(letter_T).tif', 0) #直接读为灰度图像
height, width = img_ori.shape[:2]
img_21 = np.zeros([height, width], np.uint8)
img_temp = rotate_image(img_ori, 21)
mid_h, mid_w = img_temp.shape[0] // 2 + 1, img_temp.shape[1] // 2 + 1
img_21 = img_temp[mid_h-height//2:mid_h+height//2, mid_w-width//2:mid_w+width//2]
img_roi = img_ori[210:250, 217:247]
img_21_roi = img_21[210:250, 240:270]
plt.figure(figsize=(8, 10))
plt.subplot(221), plt.imshow(img_ori, 'gray'), plt.title('Original')
plt.subplot(222), plt.imshow(img_21, 'gray'), plt.title('Clockwise Rotate 21')
plt.subplot(223), plt.imshow(img_roi, 'gray'), plt.title('Original ROI')
plt.subplot(224), plt.imshow(img_21_roi, 'gray'), plt.title('Rotation ROI')
plt.tight_layout()
plt.show()
图像配准
图像配准是一种重要的数字图像处理应用,它用于对齐同一场景的两幅或多幅图像。一幅输入图像和一幅参考图像,目的是对输入图像做几何变换,使得输出图像与参考图像对齐(配准)
def sift_kp(img):
sift = cv2.xfeatures2d.SIFT_create()
kp, des = sift.detectAndCompute(img, None)
kp_img = cv2.drawKeypoints(img, kp, None)
return kp_img, kp, des
def get_good_match(des1, des2):
bf = cv2.BFMatcher()
matches = bf.knnMatch(des1, des2, k=2)
good = []
for m, n in matches:
if m.distance < 0.75 * n.distance:
good.append(m)
return good
# H, status = cv2.findHomography(ptsA, ptsB, cv2.RANSAC, ransacReprojThreshold)
#其中H为求得的单应性矩阵矩阵
#status则返回一个列表来表征匹配成功的特征点。
#ptsA,ptsB为关键点
#cv2.RANSAC, ransacReprojThreshold这两个参数与RANSAC有关
def sift_image_align(img1, img2):
"""
图像配准
"""
_, kp1, des1 = sift_kp(img1)
_, kp2, des2 = sift_kp(img2)
good_match = get_good_match(des1, des2)
if len(good_match) > 4:
ptsA = np.float32([kp1[m.queryIdx].pt for m in good_match]).reshape(-1, 1, 2)
ptsB = np.float32([kp2[m.trainIdx].pt for m in good_match]).reshape(-1, 1, 2)
ransacReprojThreshold = 4
H, status = cv2.findHomography(ptsA, ptsB, cv2.RANSAC, ransacReprojThreshold)
img_out = cv2.warpPerspective(img2, H, (img1.shape[1], img1.shape[0]), flags=cv2.INTER_LINEAR + cv2.WARP_INVERSE_MAP)
return img_out, H, status
# 几何空间变换
img_ori = cv2.imread('DIP_Figures/DIP3E_Original_Images_CH02/Fig0237(a)(characters test pattern)_POST.tif', 0) #直接读为灰度图像
h,w=img_ori.shape[:2]
M = np.array([[1, 0.05, 0], [0.4, 1, 0]], np.float32)
img_dst = cv2.warpAffine(img_ori, M, (w+100, h+350), borderValue=0)
img_out, H, status = sift_image_align(img_ori, np.uint8(img_dst))
img_diff = img_ori - img_out
plt.figure(figsize=(10, 10))
plt.subplot(221), plt.imshow(img_ori, 'gray'), plt.title('Original')
plt.subplot(222), plt.imshow(img_dst, 'gray'), plt.title('Perspective')
plt.subplot(223), plt.imshow(img_out, 'gray'), plt.title('Aligned')
plt.subplot(224), plt.imshow(img_diff, 'gray'), plt.title('Aligned differenc against Original')
plt.tight_layout()
plt.show()

向量与矩阵运算
列向量的 a 和 b a和b a和b的内积(也称点积)
a ⋅ b = a T b = a 1 b 1 + a 2 b 2 + ⋯ + a n b n = ∑ i = 1 n a i b i (2.50) a \cdot b = a^T b = a_{1} b_{1} + a_{2}b_{2} + \dots + a_{n} b_{n} = \sum_{i=1}^n a_{i} b_{i} \tag{2.50} a⋅b=aTb=a1b1+a2b2+⋯+anbn=i=1∑naibi(2.50)
-
欧几里得向量范数,定义为内积的平方根:
∥ z ∥ = ( z T z ) 1 2 (2.51) \lVert z \rVert = (z^T z)^{\frac{1}{2}} \tag{2.51} ∥z∥=(zTz)21(2.51) -
点(向量) z 和 a z和a z和a之间的欧几里得距离 D ( z , a ) D(z,a) D(z,a)定义为欧几里得向量范数
D ( z , a ) = ∥ z − a ∥ = [ ( z − a ) T ( z − a ) ] 1 2 (2.52) D(z, a) = \lVert z - a \rVert = [(z - a)^T (z - a)]^{\frac{1}{2}} \tag{2.52} D(z,a)=∥z−a∥=[(z−a)T(z−a)]21(2.52) -
像素向量的另一个优点是在线性变换中,可表示为, A 是 大 小 m × n 的 矩 阵 , z 和 a 是 大 小 为 n × 1 的 列 向 量 A是大小m \times n的矩阵,z 和 a是大小为n \times 1的列向量 A是大小m×n的矩阵,z和a是大小为n×1的列向量
w = A ( z − a ) (2.53) w = A(z-a) \tag{2.53} w=A(z−a)(2.53) -
图像的更广泛的线性处理, f f f是表示 M N × 1 MN\times 1 MN×1向量, n n n是表示 M × N M\times N M×N噪声模式的 M N × 1 MN\times 1 MN×1的向量, g g g是表示 处理后图像的 M N × 1 MN\times 1 MN×1向量, H H H是表示用于对输入图像进行线性处理的 M N × M N MN\times MN MN×MN矩阵
g = H f + n (2.54) g = Hf + n \tag{2.54} g=Hf+n(2.54)
图像变换
图像处理任务最好按如下步骤完成:
- 变换输入图像
- 在变换域执行规定的任务,
- 执行反变换,
- 返回空间域。
二维线性变换是一种特别重要的变换,其通式为:
T ( u , v ) = ∑ x = 0 M − 1 ∑ y = 0 N − 1 f ( x , y ) r ( x , y , u , v ) (2.55) T(u,v) = \sum_{x=0}^{M-1} \sum_{y=0}^{N-1} f(x, y)r(x, y, u, v) \tag{2.55} T(u,v)=x=0∑M−1y=0∑N−1f(x,y)r(x,y,u,v)(2.55)
f ( x , y ) f(x, y) f(x,y)是输入图像, r ( x , y , u , v ) r(x, y, u, v) r(x,y,u,v)称为正变换核, u 和 v u和v u和v称为变换量, T ( u , v ) 称 为 f ( x , y ) T(u, v)称为f(x, y) T(u,v)称为f(x,y)的正变换
反变换
f ( x , y ) = ∑ u = 0 M − 1 ∑ v = 0 N − 1 T ( u , v ) s ( x , y , u , v ) (2.56) f(x, y) = \sum_{u=0}^{M-1} \sum_{v=0}^{N-1} T(u,v)s(x, y, u, v) \tag{2.56} f(x,y)=u=0∑M−1v=0∑N−1T(u,v)s(x,y,u,v)(2.56)
s ( x , y , u , v ) s(x, y, u, v) s(x,y,u,v)称为反变换核
可分离变换核
r ( x , y , u , v ) = r 1 ( x , u ) r 2 ( y , v ) (2.57) r(x, y, u, v) = r_{1}(x, u) r_{2}(y,v) \tag{2.57} r(x,y,u,v)=r1(x,u)r2(y,v)(2.57)
对称变换核
r ( x , y , u , v ) = r 1 ( x , u ) r 1 ( y , v ) (2.58) r(x, y, u, v) = r_{1}(x, u) r_{1}(y,v) \tag{2.58} r(x,y,u,v)=r1(x,u)r1(y,v)(2.58)
傅里叶变换的正变换核与反变换核
r ( x , y , u , v ) = e − j 2 π ( u x / M + v y / N ) (2.59) r(x, y, u, v) = e^{-j2\pi(ux/M + vy/N)}\tag{2.59} r(x,y,u,v)=e−j2π(ux/M+vy/N)(2.59)
s ( x , y , u , v ) = 1 M N e j 2 π ( u x / M + v y / N ) (2.60) s(x, y, u, v) = \frac{1}{MN} e^{j2\pi(ux/M + vy/N)}\tag{2.60} s(x,y,u,v)=MN1ej2π(ux/M+vy/N)(2.60)
傅里叶变换核是可分离的和对称的
def add_sin_noise(img, scale=1, angle=0):
"""
add sin noise for image
param: img: input image, 1 channel, dtype=uint8
param: scale: sin scaler, smaller than 1, will enlarge, bigger than 1 will shrink
param: angle: angle of the rotation
return: output_img: output image is [0, 1] image which you could use as mask or any you want to
"""
height, width = img.shape[:2] # original image shape
# convert all the angle
if int(angle / 90) % 2 == 0:
rotate_angle = angle % 90
else:
rotate_angle = 90 - (angle % 90)
rotate_radian = np.radians(rotate_angle) # convert angle to radian
# get new image height and width
new_height = int(np.ceil(height * np.cos(rotate_radian) + width * np.sin(rotate_radian)))
new_width = int(np.ceil(width * np.cos(rotate_radian) + height * np.sin(rotate_radian)))
# if new height or new width less than orginal height or width, the output image will be not the same shape as input, here set it right
if new_height < height:
new_height = height
if new_width < width:
new_width = width
# meshgrid
u = np.arange(new_width)
v = np.arange(new_height)
u, v = np.meshgrid(u, v)
# get sin noise image, you could use scale to make some difference, better you could add some shift
noise = abs(np.sin(u * scale))
# here use opencv to get rotation, better write yourself rotation function
C1=cv2.getRotationMatrix2D((new_width/2.0, new_height/2.0), angle, 1)
new_img=cv2.warpAffine(noise, C1, (int(new_width), int(new_height)), borderValue=0)
offset_height = abs(new_height - height) // 2
offset_width = abs(new_width - width) // 2
img_dst = new_img[offset_height:offset_height + height, offset_width:offset_width+width]
output_img = (img_dst - img_dst.min()) / (img_dst.max() - img_dst.min())
return output_img
def butterworth_notch_filter(img, D0, uk, vk, order=1):
M, N = img.shape[1], img.shape[0]
u = np.arange(M)
v = np.arange(N)
u, v = np.meshgrid(u, v)
DK = np.sqrt((u - M//2 - uk)**2 + (v - N//2 - vk)**2)
D_K = np.sqrt((u - M//2 + uk)**2 + (v - N//2 + vk)**2)
kernel = (1 / (1 + (D0 / (DK+1e-5))**order)) * (1 / (1 + (D0 / (D_K+1e-5))**order))
kernel_normal = (kernel - kernel.min()) / (kernel.max() - kernel.min())
return kernel_normal
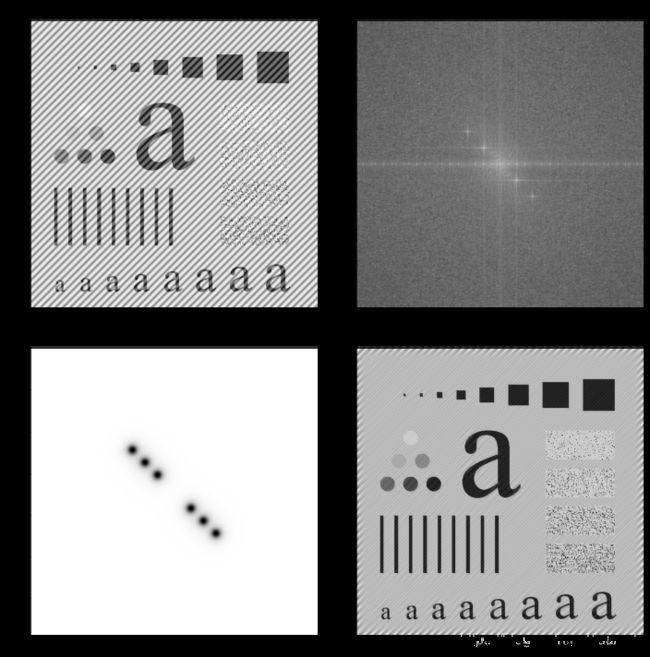
# Sine noise -> denoise
import cv2
import matplotlib.pyplot as plt
# input image without noise
img_ori = cv2.imread('DIP_Figures/DIP3E_Original_Images_CH02/Fig0237(a)(characters test pattern)_POST.tif', 0) #直接读为灰度图像
# sine noise
noise = add_sin_noise(img_ori, scale=0.25, angle=-45)
# image with sine noise
img = np.array(img_ori / 255, np.float32)
img = img + noise
# clip & normalize and set image to 8 bits [0, 255]
img = normalize(img)
img = np.clip(img, low_clip, 1.0)
img = np.uint8(img * 255)
# Denoise with Butterworth notch filter
plt.figure(figsize=(10, 10))
plt.subplot(221),plt.imshow(img,'gray'),plt.title('Image with sin noise')
#--------------------------------
fft = np.fft.fft2(img)
fft_shift = np.fft.fftshift(fft)
amp_img = np.abs(np.log(1 + np.abs(fft_shift)))
plt.subplot(222),plt.imshow(amp_img,'gray'),plt.title('FFT')
#--------------------------------
order = 3
start = 40
step = 30
BNF_dst = 1.0
for i in range(order):
BNF = butterworth_notch_filter(img, D0=10, uk=start + i * step, vk=start + i * step, order=3)
BNF_dst *= BNF
plt.subplot(223),plt.imshow((BNF_dst),'gray'),plt.title('mask')
#--------------------------------
# 对新的图像进行逆变换
f1shift = fft_shift * (BNF_dst)
f2shift = np.fft.ifftshift(f1shift)
img_new = np.fft.ifft2(f2shift)
#出来的是复数,无法显示
img_new = np.abs(img_new)
#调整大小范围便于显示
img_new = np.uint8(normalize(img_new) * 255)
plt.subplot(224),plt.imshow(img_new,'gray'),plt.title('Denoised')
# fft_mask = amp_img * BNF_dst
# plt.subplot(224),plt.imshow(fft_mask,'gray'),plt.title('FFT with mask')
plt.tight_layout()
plt.show()
当正、反变换核可分、对称,且 f ( x , y ) f(x,y) f(x,y)是大小为 M × M M \times M M×M的方形图像时,式(2.55)和式(2.56)可表示为矩阵形式:
T = A F A (2.63) T = AFA \tag{2.63} T=AFA(2.63)
反变换:
B T B = B A F A B (2.64) BTB = BAFAB \tag{2.64} BTB=BAFAB(2.64)
若 B = A − 1 B = A^{-1} B=A−1,则 F = B T B F=BTB F=BTB,完全恢复;若 B ≠ A − 1 B \neq A^{-1} B=A−1,则 F ^ = B A F A B \hat F = BAFAB F^=BAFAB,近似恢复。
图像和随机变量
灰度级 z k z_k zk在这幅图像中出现的概率
p ( z k ) = n k M N (2.67) p(z_k) = \frac{n_k}{MN} \tag{2.67} p(zk)=MNnk(2.67)
n k n_k nk是灰度级 z k z_k zk在图像中出现的次数
∑ k = 0 L − 1 p ( z k ) = 1 (2.68) \sum_{k=0}^{L-1}p(z_k) = 1 \tag{2.68} k=0∑L−1p(zk)=1(2.68)
均值(平均)灰度为:
m = ∑ k = 0 L − 1 z k p ( z k ) (2.69) m = \sum_{k=0}^{L-1} z_k p(z_k) \tag{2.69} m=k=0∑L−1zkp(zk)(2.69)
灰度的方差为:
σ 2 = ∑ k = 0 L − 1 ( z k − m ) 2 p ( z k ) (2.70) \sigma^2 = \sum_{k=0}^{L-1} (z_k - m )^2 p(z_k) \tag{2.70} σ2=k=0∑L−1(zk−m)2p(zk)(2.70)
第 n n n阶中心矩:
灰度的方差为
μ n ( z ) = ∑ k = 0 L − 1 ( z k − m ) n p ( z k ) (2.71) \mu_n(z) = \sum_{k=0}^{L-1} (z_k - m )^n p(z_k) \tag{2.71} μn(z)=k=0∑L−1(zk−m)np(zk)(2.71)