51单片机学习笔记-14 ADDA
14 ADDA
[toc]
注:笔记主要参考B站江科大自化协教学视频“51单片机入门教程-2020版 程序全程纯手打 从零开始入门”。
注:工程及代码文件放在了本人的Github仓库。
14.1 AD/DA简介
14.1.1 AD/DA基本介绍
AD(Analog to Digital):模拟-数字转换,将模拟信号转换为计算机可操作的数字信号。
DA(Digital to Analog):数字-模拟转换,将计算机输出的数字信号转换为模拟信号。
AD/DA转换打开了计算机与模拟信号的大门,极大的提高了计算机系统的应用范围,也为模拟信号数字化处理提供了可能。

AD通常是对电压进行转换(注意电阻阻值应大致相同),并且AD转换通常有多个输入通道,用多路选择开关连接至AD转换器,以实现AD多路复用的目的,提高硬件利用率。AD/DA与单片机数据传送可使用并口(速度快、原理简单),也可使用串口(接线少、使用方便),看需求而定。另外也可以将AD/DA模块直接集成在单片机内,这样直接写入/读出寄存器就可进行AD/DA转换,单片机的IO口可直接复用为AD/DA的通道。

下面是古老的(也非常经典的)AD转换芯片ADC0809、DA转换芯片DAC0832,由于芯片体积大且接口太多,目前已经逐渐淘汰。

- IN7~IN0:8路模拟输入。
- DB7~DB0:输出的8位数字信号。
- ADDA、ADDB、ADDC、ALE:地址锁存,选择当前的模拟输入引脚。
- START:开始AD转换。
- EOC:转换结束。
- CLOCK:时钟线。
- OE:输出使能,控制三态门输出。
- UREF(+)、U~REF(-):参考电压。
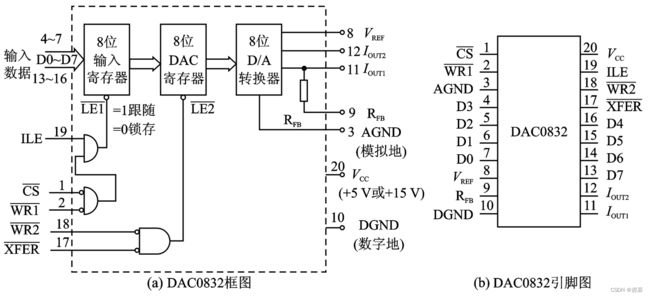
- D0~D7:输入的8位数字信号。
- ILE、CS、WR1、WR2、XFER:控制信号。
- 输入寄存器与DAC寄存器:用于多路同步。若有两个DAC0832要求其同步输出,那么就可以先将数据放入寄存器,通过控制信号便可实现数据同步。
- D/A转换器:输出模拟信号。
目前,较为常用的AD/DA芯片是PCF8591(IIC总线),芯片包含4路AD和1路DA。相比于之前的ADC0809、DAC0832,本芯片更加简单高效,外接电路也不需要额外的电阻电容。下面是其原理图及引脚简介:

- AIN0~AIN3:4路输入的模拟通道。
- A0~A2:IIC器件地址。
- SCL、SDA:IIC通信总线。
- AOUT:数据输出通道。
- ……
14.1.2 运放电路
运算放大器(简称“运放”)是具有很高放大倍数的放大电路单元。内部集成了差分放大器、电压放大器、功率放大器三级放大电路,是一个性能完备、功能强大的通用放大电路单元,由于其应用十分广泛,现已作为基本的电路元件出现在电路图中。运算放大器可构成的电路有:电压比较器、反相放大器、同相放大器、电压跟随器、加法器、积分器、微分器等。

- 理想运算放大器具备以下性质:
- 无限大的输入阻抗: 理想的运算放大器输入端不容许任何电流流入,即输入信号V+与V-两端点的电流信号恒为零,即输入阻抗无限大。
- 趋近于零的输出阻抗: 理想运算放大器的输出端是一个完美的电压源,无论流至放大器负载的电流如何变化,放大器的输出电压恒为一定值,即输出阻抗为零。
- 无限大的开回路增益: 理想运算放大器的开回路的状态下,输入端的差动信号有无限大的电压增益,这个特性使得运算放大器十分适合在实际应用时加上负反馈组态。
- 无限大的共模抑制比: 理想运算放大器只能对V+与V-两端点电压的差值(差分信号)有反应,即只放大V+−V− 的部份。对于两输入信号的相同的部分(共模信号)将完全忽略不计。
注:共模信号:双端输入时,两个信号相同。差模信号:双端输入时,两个信号的相位相差180度。
集成运算放大器有两种工作状态:
- 线性状态:当给集成运算放大器加上负反馈电路时,工作在线性状态。工作特点:
- 具有虚断特性及流入和流出输入端的电流都为0,I- = I+ = 0A。
- 具有虚短的特性及两个输入端的电压相等,U+ = U-。
- 非线性状态:如果给集成运算放大器加正反馈电路或当其在开环工作时,工作在非线性状态。工作特点:
- 当同相输入端电压大于反向输入端电压时,输出电压为高电平。
- 当同相输入端电压小于反向输入端电压时,输出电压为低电平。
运算放大器电路的分析方法:虚短、虚断(负反馈条件下):
- 虚短: 集成运算放大器的开环放大倍数很大,一般通用型的运算放大器的开环电压放大倍数都在80dB以上,但是运放的输出电压是有限制的,一般 在10V~14V,然而运放的差模输入电压不足1 mV,因此可以输入两端可以近似等电位,就相当于短路。 开环电压放大倍数越大,两输入端的电位越接近相等,这种特性称之为虚短。
- 虚断: 集成运算放大器具有输入高阻抗的特性,一般同向输入端和反向输入端的输入电阻都在1MΩ以上,所以输入端流入运放的电流往往小于1uA,远小于输入端外电路的电流。所以这里通常可把运放的两输入端视为开路,并且运放的输入电阻越大,同向和反向输入两端越接近开路。在运放处于线性状态时,根据这个特性可以把两输入端视为等效开路,简称虚断。

- 电压比较器:开环工作,非线性状态。利用运放的放大倍数无穷大,来进行数字化。同相输入电压更大输出VCC;反之输出GND。
V C C = { V C C , V I N + > V I N + G N D , V I N + < V I N + VCC= \begin{cases} VCC, & V_{IN+} > V_{IN+}\\ GND, & V_{IN+} < V_{IN+} \end{cases} VCC={VCC,GND,VIN+>VIN+VIN+<VIN+ - 反相放大器。根据“虚短”中间的电势都为0,根据“虚断”流经R1和R2的电流大小及方向都相同。依次推算出输入电压与输出电压的关系。
V O U T = − R 2 R 1 V I N V_{OUT} = -\frac{R2}{R1}\ V_{IN} VOUT=−R1R2 VIN - 同向放大器。分析思路同上。
V O U T = ( 1 + R 2 R 1 ) V I N V_{OUT} = (1+\frac{R2}{R1})\ V_{IN} VOUT=(1+R1R2) VIN - 电压跟随器。主要用于提高电路的驱动能力。放大倍数为1时,虽然没有电压放大特性,但是可以放大功率。
V O U T = V I N V_{OUT} = V_{IN} VOUT=VIN
14.1.3 DA原理
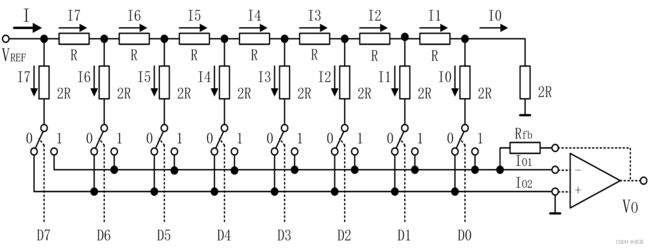
运放工作在负反馈状态,所以 I01 和 I02 所在的两个线上的电压都相当于接在GND上,这样就不会影响上面电阻网络的分压分流等状态。根据电阻的串并联状态,I7 ~ I0 的大小为公比为0.5的等比数列,即 I7 ~ I0 为位权。注意总电流 I = V R E F / R I = V_{REF} / R I=VREF/R,所以通过Rfb的电流大小就是I的 [D7~D0]/256 倍,并且这个输出精度就是256不可变。即,输出电压
V O = − D 7 ∼ D 0 256 V R E F R f b R V_O = -\ \frac{D7 \sim D0}{256} \frac{V_{REF}\ R_{fb}}{R} VO=− 256D7∼D0RVREF Rfb
当 R f b = R R_{fb} = R Rfb=R 时,
V O = − D 7 ∼ D 0 256 V R E F V_O = -\ \frac{D7 \sim D0}{256} V_{REF} VO=− 256D7∼D0VREF
而开发板上搭载的是 PWM型DA转换器,下图14-9所示。注意这种电路结构相比于图14-8所示的电路结构来说,极大的节省端口且精度高,但缺点就是需要更多资源来产生PWM波,并且低通滤波器性能不好时平均电压还会自带纹波。

- R1、C1、R2、C2:组成二阶低通滤波器。可以输出PWM波的平均电压(随着占空比的不同而不同),但这个平均电压并没有驱动能力。
- 电压跟随器。进行功率放大,增强输入的平均电压的负载能力。
- 平均电压: V a v g = D u t y ∗ V C C V_{avg} = Duty * V_{CC} Vavg=Duty∗VCC,其中 D u t y Duty Duty指的是PWM波的占空比,范围0~1; V C C V_{CC} VCC则是指PWM波的高电平电压。
14.1.4 AD原理
AD转换的常见架构主要有积分型、逐次逼近型、并行比较型/串并行型、Σ-Δ调制型、电容阵列逐次比较型、压频变换型等。但目前最常用的是 逐次逼近型 的AD转换器:

端口说明在图14-3下已经介绍过。整个AD转换器的核心部件就是 “比较器” 和 “DAC”,针对外部输入的模拟电压,“DAC” 通过不断逼近这个输入电压,直到8位数字量全部试完(如二分法),便可认为当前DAC的数字量认为是外部模拟输入的数字量。该DAC的精度也就是内部DAC的位宽。即,输出的数字量为:
( D 7 ∼ D 0 ) = V I N V R E F ∗ 256 . . . . . . 结果取整 (D7 \sim D0) = \frac{V_{IN}}{V_{REF}}*256 \ ......\ 结果取整 (D7∼D0)=VREFVIN∗256 ...... 结果取整
AD/DA的性能指标:
- 分辨率:指AD/DA数字量的精细程度,通常用位数表示。例如,对于5V电源系统来说,8位的AD分辨率为5V/256 = 0.01953125V。
- 转换速度:表示AD/DA的最大采样/建立频率,通常用转换频率或者转换时间来表示,对于采样/输出高速信号,应注意AD/DA的转换速度
14.1.5 XPT2046通信时序
开发板上搭载的AD/DA都不是很主流。
- AD转换器使用了触摸屏芯片XPT2046,与上述AD转换原理稍有不同。XPT2046是一款4线制电阻式触摸屏控制器,内含 12位分辨率125KHz转换速率 逐步逼近型AD转换器。
- 支持从 1.5V 到 5.25V 的低电压 I/O 接口。
- 内部自带 2.5V 参考电压,可以作为辅助输入、温度测量和电池监测之用,电池监测的电压范围 0V ~ 6V。
- 内部自带温度传感器,工作温度范围为-40℃~+85℃。
- 采用 3 线制 SPI通信接口。
- DA转换器则是输入一个PWM波(P21),后面的电路对这个PWM波进行低通滤波,从而输出模拟信号给LED灯。

- AD转换器——ET2046:
- X+、X-、Y+、Y-:控制像素点的位置。
- AUX:ADC辅助输入通道。
- VBAT:电池监视输入端。
- VREF:参考电压输入/输出。
- IOVDD:数字电源输入端。
- PENIRQ:笔接触中断引脚。
- DIN、DOUT、CS、DCLK、BUSY:SPI通信相关引脚。 DIN、DOUT就是数据的输入输出;CS片选信号;DCLK时钟线。在多机SPI通信中,DIN、DOUT、DCLK共用总线,CS则单独分开,以此区分不同的从机。
- ADC模块右侧
- AIN0:滑动变阻分压。
- AIN1:热敏电阻NTC分压。
- AIN2:光敏电阻GR分压。
- DA转换器
- P21:输入PWM波。
- R31、C32:组成低通滤波器,对PWM进行滤波输出其平均电压。
- 后面的是电压跟随器,R28、C29、R30、R33可以去掉。另外可以看到,LED直接是正极供电,可见经过运放后正极驱动能力足够强。
下图给出SPI的读写时序。DCLK上升沿输入数据,DCLK下降沿输出数据。 由于总线独立,所以输入和输出可以同时进行,以实现主机和从机的寄存器交换,但一般是先发再收。SPI刚开始建立通信时,主机首先发送的是状态控制字,然后主机就可以连续读出2个字节(12位的数字信号)。

| 位 | 名称 | 功能描述 |
|---|---|---|
| 7 | S | 开始位。为1表示一个新的控制字节到来,为0则忽略PIN引脚上数据。 |
| 6~4 | A2~A0 | 通道选择位。单端时,001/011为AIN0、101为AIN1、010为AIN2、110为AIN3。 |
| 3 | MODE | 12位/8位转换分辨率选择位(0/1)。 |
| 2 | SER/DFR | 单端输入方式/差分输入方式选择位(1/0)。差分性能好,但此开发板只支持单端。 |
| 1~0 | PD1~PD0 | 低功率模式选择位。若为11,器件总处于供电状态;若为00,器件在变换之间处于低功率模式。 |
注意XPT内部有一个2.5V的参考电压,PD1=1时启用。但是为了满量程测量(5V),调用外部的参考电压(引脚VREF),所以PD1~PD0设置为00,此时满量程4095就代表5V。
14.2 实验:AD模数转换
需求:在LCD上显示三个模拟元件的数值:可调电阻、光敏电阻(光强越大阻值越小)、负温度系数热敏电阻NTC(温度越高阻值越小)。注意根据原理图,光敏电阻和热敏电阻的阻值减小会导致分压减小。
注:由于12位数最大值为4095,所以可以使用四位数字进行显示。
代码展示:只有主函数。
-main.c
#include 14.3 实验:DA呼吸灯
需求:使用PWM型DA转换器实现呼吸灯的效果。

代码如下:
- mian.c
#include Timer0.h与之前相同。
编程感想:
- 根据实验现象可以发现,PWM型DA转换器的LED亮度不如LED2。这是因为开发板的电路设计中,运放及其周围电路构成了放大倍数为2倍的“同向放大器”,而不是放大倍数为1的“电压跟随器”。这导致只要2.5V便达到饱和。UP主这么解释的,但是我觉得这样反而会更亮??所以导致其变暗的原因应该是在于运放没有接差分电源吧。