【DIY】STM32F103C6T6蓝牙车,从硬件设计到代码编写手把手教学,附源码
stm32f103c6t6蓝牙车,从硬件设计到代码编写手把手教学,附源码
文章目录
- 前言
- 一、STM32CUBEMX配置
- 二、Fusion360(工业设计)
- 三、立创EDA(硬件设计)
- 四、控制算法(源代码)
-
- 1.引入GPIO库,小车motor端
- 2.引入UART库,小车蓝牙端
- 3.主函数
- 总结
前言
STM32F103C6T6蓝牙车,从硬件设计到代码编写手把手教学,附源码
很少有STM32F103C6T6芯片的操作说明,最近芯片大涨,我用STM32F103C6T6简单的做了个蓝牙小车,供大家参考使用。源码在后面。走过的朋友一键三连哦。
使用工具:
工业设计:Fusion360设计外壳
PCB设计: 立创EDA+嘉立创
控制器:STM32CUBEMX
驱动器:DRV8833
电机:普通的直流电机
控制算法:无,简单的IO口打开关断
 设计出来的总体是这样,
设计出来的总体是这样,
stm32f103c6t6蓝牙小车车
提示:以下是本篇文章正文内容,下面案例可供参考
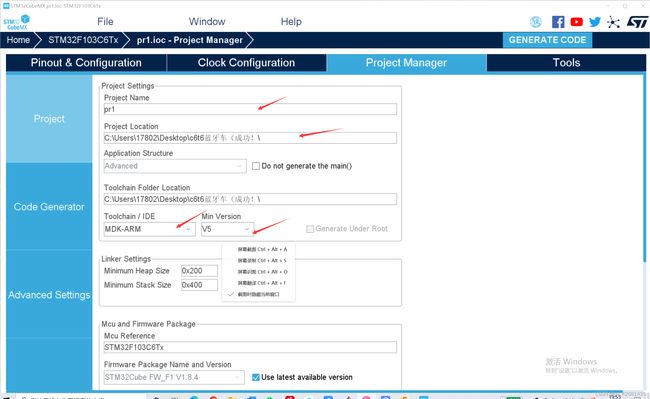
一、STM32CUBEMX配置
用stm32cubemx玩新的芯片是比较友好的,以下是设置步骤










二、Fusion360(工业设计)
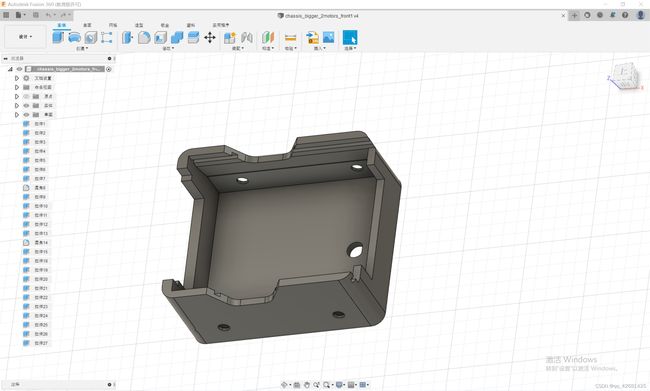 车身
车身
车轮胎
三、立创EDA(硬件设计)
 原理图
原理图
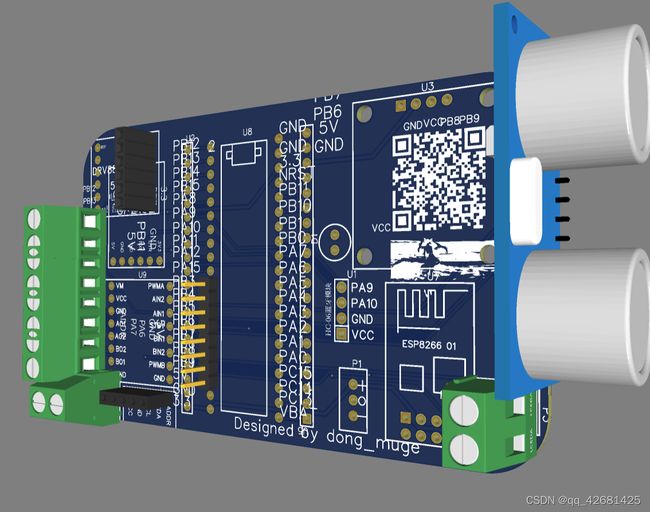 3D图
3D图
四、控制算法(源代码)
1.引入GPIO库,小车motor端
代码如下(示例):
void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(LED1_GPIO_Port, LED1_Pin, GPIO_PIN_SET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, car0_Pin|car1_Pin|car2_Pin|car3_Pin, GPIO_PIN_SET);
/*Configure GPIO pin : PtPin */
GPIO_InitStruct.Pin = LED1_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(LED1_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pins : PBPin PBPin PBPin PBPin */
GPIO_InitStruct.Pin = car0_Pin|car1_Pin|car2_Pin|car3_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
GPIO端口配置
2.引入UART库,小车蓝牙端
代码如下(示例):
/**
******************************************************************************
* @file usart.c
* @brief This file provides code for the configuration
* of the USART instances.
******************************************************************************
* @attention
*
* © Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "usart.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
UART_HandleTypeDef huart1;
/* USART1 init function */
void MX_USART1_UART_Init(void)
{
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
}
void HAL_UART_MspInit(UART_HandleTypeDef* uartHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspInit 0 */
/* USER CODE END USART1_MspInit 0 */
/* USART1 clock enable */
__HAL_RCC_USART1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_10;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USART1 interrupt Init */
HAL_NVIC_SetPriority(USART1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspInit 1 */
/* USER CODE END USART1_MspInit 1 */
}
}
void HAL_UART_MspDeInit(UART_HandleTypeDef* uartHandle)
{
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspDeInit 0 */
/* USER CODE END USART1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_USART1_CLK_DISABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_9|GPIO_PIN_10);
/* USART1 interrupt Deinit */
HAL_NVIC_DisableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspDeInit 1 */
/* USER CODE END USART1_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
UART串口通信配置
3.主函数
代码如下(示例):
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* © Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
#define LED_Pin GPIO_PIN_13
#define LED_GPIO GPIOC
//#define LED_Pin0 GPIO_PIN_12
//#define LED_GPIO0 GPIOB
//#define LED_Pin1 GPIO_PIN_13
//#define LED_GPIO1 GPIOB
//#define LED_Pin2 GPIO_PIN_14
//#define LED_GPIO2 GPIOB
//#define LED_Pin3 GPIO_PIN_15
//#define LED_GPIO3 GPIOB
//#define LED_Pin4 GPIO_PIN_11
//#define LED_GPIO4 GPIOA
//#define LED_Pin5 GPIO_PIN_12
//#define LED_GPIO5 GPIOA
//#define LED_Pin6 GPIO_PIN_15
//#define LED_GPIO6 GPIOA
//#define LED_Pin7 GPIO_PIN_18
//#define LED_GPIO7 GPIOA
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
uint8_t aTxStartMessages[] = "\r\n******Please enter your choic******\r\nLED_ON:1,LED_OFF:0:\r\n";
uint8_t LEDON[]="\r\nLED_ON\r\n";
uint8_t LEDOFF[]="\r\nLED_OFF\r\n";
uint8_t aRxBuffer[1];
void SystemClock_Config(void);
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
HAL_UART_Receive_IT(&huart1,(uint8_t*)aRxBuffer,1);
HAL_UART_Transmit_IT(&huart1 ,(uint8_t*)aTxStartMessages,sizeof(aTxStartMessages));
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
// HAL_Delay(300);
// HAL_GPIO_WritePin(LED1_GPIO_Port,LED1_Pin,GPIO_PIN_RESET);
// HAL_Delay(300);
// HAL_GPIO_WritePin(LED1_GPIO_Port,LED1_Pin,GPIO_PIN_SET);
//
// HAL_UART_Transmit(&huart1, (uint8_t *)"hello windows!!!\r\n", 16 , HAL_MAX_DELAY);
// HAL_Delay(100);
//
HAL_UART_Receive_IT(&huart1,(uint8_t*)aRxBuffer,1);
}
/* USER CODE END 3 */
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
/* Prevent unused argument(s) compilation warning */
UNUSED(huart);
/* NOTE: This function Should not be modified, when the callback is needed,
the HAL_UART_TxCpltCallback could be implemented in the user file
*/
if(aRxBuffer[0]=='1')//Í£Ö¹
{
HAL_GPIO_WritePin(GPIOB,car0_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB,car1_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB,car2_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB,car3_Pin,GPIO_PIN_SET);
}
else if(aRxBuffer[0]=='2')//Ç°½ø
{
HAL_GPIO_WritePin(GPIOB,car0_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB,car1_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,car2_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB,car3_Pin,GPIO_PIN_RESET);
}
else if(aRxBuffer[0]=='3')
{
HAL_GPIO_WritePin(LED1_GPIO_Port,LED1_Pin,GPIO_PIN_RESET);
HAL_UART_Transmit(&huart1,(uint8_t*)LEDON,sizeof(LEDON),0xFFFF);
}
else if(aRxBuffer[0]=='4')
{
HAL_GPIO_WritePin(LED1_GPIO_Port,LED1_Pin,GPIO_PIN_SET);
HAL_UART_Transmit(&huart1,(uint8_t*)LEDOFF,sizeof(LEDOFF),0xFFFF);
}
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
总结
本文仅仅简单介绍了STM32F103C6T6芯片控制蓝牙车的使用,评论区欢迎讨论。