Boost电路原理分析及其元件参数设计
Boost电路又称为升压斩波电路(Boost Chopper),是一种典型的直流变换电路。这种电路广泛应用于开关电源、直流电机传动、光伏发电系统以及电动汽车的驱动控制等领域。
1 Boost电路原理
图1是Boost电路的原理图,从图中可以看出,该电路由开关管VQ、电感L、输入滤波电容Cs、输出滤波电容C、二极管VD和负载R组成。其中开关管VQ的控制端需要输入驱动信号来控制其导通和截止,工程应用中驱动信号通常采用PWM的方式来实现。

图1 Boost电路拓扑结构图
当控制端的输入信号 为高电平时,此时开关管VQ导通,相当于短路,其等效电路如图2所示。通过电路可以看出,此时输入电压给电感L充电,需要注意这时电感两端电压
为高电平时,此时开关管VQ导通,相当于短路,其等效电路如图2所示。通过电路可以看出,此时输入电压给电感L充电,需要注意这时电感两端电压 的极性为左正右负,并且随着时间的增加,电感上的电流
的极性为左正右负,并且随着时间的增加,电感上的电流 (即输入电流
(即输入电流 )不断增大。此时二极管VD反向截止,相当于断路。而此时的电容C向负载R放电,随着时间的增加,电容C两端的电压
)不断增大。此时二极管VD反向截止,相当于断路。而此时的电容C向负载R放电,随着时间的增加,电容C两端的电压 (即输出电压
(即输出电压 )在不断减小。
)在不断减小。

图2 Boost电路VQ导通时等效电路图
当控制端的输入信号为低电平时,此时开关管VQ截止,相当于断路,其等效电路如图3所示。此时电感L两端电压的极性变为右正左负,使得VD导通,电感放电,且随着时间的增加,电感上的电流(即输入电流)不断减小。这时输入电压 和电感L上的电压叠加起来,一起给电容C充电,同时给负载R供电。随着时间的增加,电容C两端的电压(即输出电压)在不断增加。
和电感L上的电压叠加起来,一起给电容C充电,同时给负载R供电。随着时间的增加,电容C两端的电压(即输出电压)在不断增加。

图3 Boost电路VQ截止时等效电路图
通过给开关管输入PWM控制脉冲,VQ的开关状态不断变化,重复着上述过程,最终使得电路的输出电压高于输入电压。Boost电路的工作波形如图4所示。

图4 Boost电路工作波形图
2 Boost电路的工作模式
Boost电路根据电感上的电流是否连续分为三种工作模式,分别是连续导通模式(Continuous Conduction Mode,CCM)、临界导通模式(Boundary Conduction Mode,BCM)和非连续导通模式(Discontinuous Conduction Mode,DCM)。为了深入研究Boost电路这三种工作模式的原理,先介绍两个概念:纹波电流和电流平均值。
(1)输入信号的纹波电流
纹波电流通常用峰峰值来表示,即
(有时纹波电流也可以用峰峰值的一半来表示,即![\bigtriangleup i_{L}=\tfrac{1}{2}[I_{max}-I_{min}]](http://img.e-com-net.com/image/info8/4d114441aef54b4ea91b22695c0dbb8d.png) )
)
(2)波动电流的平均值

注: 式中 表示在周期内输入电流与t轴围成图象的面积。(图5 红色线围成的区域)
表示在周期内输入电流与t轴围成图象的面积。(图5 红色线围成的区域)
2.1 CCM连续导通模式

图5 Boost电路CCM模式下电感电流波形图
通过图5可以看出,Boost电路工作在CCM模式时。此时一个周期内的由一个矩形和一个三角形组成,即:
CCM模式下纹波电流为:
CCM模式下波动电流的平均值为:
![I_{L}=\frac{S_{L}}{T_{S}}=\frac{1}{2}[I_{max}-I_{min}]+I_{min}=\frac{1}{2}\bigtriangleup i_{L}+I_{min}](http://img.e-com-net.com/image/info8/a7b63f9527c84eb0b09ea34d5a67bd78.png)
上式可以说明到的距离和到的距离相等,即。若想让Boost电路工作在CCM模式,须保证,也就是要保证大于。
综上所述,Boost电路工作在CCM模式下需要满足的条件为:
2.2 BCM临界导通模式

图6 Boost电路BCM模式下电感电流波形图
通过图6可以看出,Boost电路工作在CCM模式时。此时一个周期内的由一个三角形组成,即:
BCM模式下纹波电流为:
BCM模式下波动电流的平均值为:
![I_{L}=\frac{S_{L}}{T_{S}}=\frac{1}{2}[I_{max}-I_{min}]=\frac{1}{2}I_{max}](http://img.e-com-net.com/image/info8/92eeab52e47d4f2abea6f310c9846836.png)
上式同样可以说明到的距离和到的距离相等,即。若想让Boost电路工作在BCM模式,须保证,也就是要保证等于。
由于,所以Boost电路工作在BCM模式下需要满足的条件为:
2.2 DCM非连续导通模式
 图7 Boost电路DCM模式下电感电流波形图
图7 Boost电路DCM模式下电感电流波形图
通过图7可以看出,Boost电路工作在DCM模式时,此时一个周期内的由一个三角形组成,但是该三角形的底边长为,且有,即:
DCM模式下纹波电流和BCM模式一样:
DCM模式下波动电流的平均值为:

在DCM模式下到的距离和到的距离并不相等,从图中可知,即。由此可以看出, 若想让Boost电路工作在DCM模式,需要保证小。
综上所述,Boost电路工作在DCM模式下需要满足的条件为:
2.3 小结
(1)当时,Boost电路工作在连续导通模式(CCM)
(2)当时,Boost电路工作在临界导通模式(BCM)
(3)当时,Boost电路工作在非连续导通模式(DCM)
3 Boost电路在CCM模式下的元件参数设计
Boost电路通常工作在CCM模式下,所以本文主要研究CCM模式下Boost电路的元件参数设计。为了更好的表述和理解,首先对以下变量进行说明:和 表示输入和输出的直流电压,
表示输入和输出的直流电压,  表示电感L上的电压,
表示电感L上的电压, 和
和 表示输入和输出的直流电流,
表示输入和输出的直流电流, 和
和 表示输入和输出的功率;
表示输入和输出的功率; 表示控制信号的周期,
表示控制信号的周期, 表示控制信号高电平持续的时间,
表示控制信号高电平持续的时间, 则表示控制信号低电平持续的时间,D表示控制信号高电平的占空比。
则表示控制信号低电平持续的时间,D表示控制信号高电平的占空比。
(1)输入电压与输出电压的关系
由于电感上的能量遵循守恒原则,即吸收的能量等于释放的能量,如图4(d)所示。根据伏秒平衡公式可得:

(2)输入电流与输出电流的关系
假设电路工作在理想状态下电路无损耗,即:

3.1 储能电感L的参数设计
(1)求电感上的纹波电流
已知电感的VCR:

① 在时间内,由图4(d)所示


此时与方向关联,有:


② 在时间内,由图4(d)所示


此时与方向非关联,有:

综上所述,在CCM模式下电感上的纹波电流 为:
为:
(2)通过上述分析可知,CCM模式下电感上的纹波电流为:

而电感上的电流 就是输入电流:
就是输入电流:

另外,根据第3节对Boost电路工作模式的分析可知,在CCM模式下有:

则有:

由此得出,要使Boost电路工作于CCM模式下,其电感L的取值必须满足下述条件:
(注意:上式中的表示Boost电路的最大输出功率)
(3)设计Boost电路电感L的参数时,不仅要考虑电路的工作模式,还要考虑电流的纹波率 ,电感电流的纹波率:
,电感电流的纹波率:

已知:
所以:

若电路的电流纹波率要满足: ,则有:
,则有:

比较上面两个电感L的取值条件,由于纹波率指标 通常都小于1,所以在CCM模式下电感L的取值只需要考虑纹波率指标即可。即Boost电路工作在CCM模式下,且纹波率要小于时,电感L的取值需满足的条件为:
通常都小于1,所以在CCM模式下电感L的取值只需要考虑纹波率指标即可。即Boost电路工作在CCM模式下,且纹波率要小于时,电感L的取值需满足的条件为:
(4)令:

当 时,
时, 取得最大值,即:
取得最大值,即:

要满足 ,只需满足
,只需满足 即可,因此当D可以取到1/3时电感L的取值需满足的条件为:
即可,因此当D可以取到1/3时电感L的取值需满足的条件为:
(5)综上所述,Boost电路工作在CCM模式下,且电流纹波率小于时,电感L的取值需满足:
特别的,当占空比D可以取1/3时,电感L的取值需满足的条件又可以表述为:
3.2 输出滤波电容C的参数设计
相对于储能电感的参数设计,输出滤波电容的参数设计要简单一些,只需要考虑输出电压纹波率的指标 即可。
即可。
首先求输出滤波电容C上的纹波电压 ,已知输出滤波电容的VCR:
,已知输出滤波电容的VCR:

代入参数可得:


所以:

要求输出电压纹波率小于,即:

综上所述,Boost电路在满足输出电压纹波率小于时,输出滤波电容C的取值需满足的条件为:
3.3 输入滤波电容Cs的参数设计
在CCM模式下,假设电感L的纹波电流 全部被输入电容Cs吸收(参考图5),则有:
全部被输入电容Cs吸收(参考图5),则有:
其中 是输入信号的纹波电压,而
是输入信号的纹波电压,而 是输入电压的纹波率:
是输入电压的纹波率:

其中是输入信号的纹波电流:
3.4 二极管选型
利用仿真软件中工具探头来看开关管和二极管处的电压和电流。
开关管处电压波形:绿色波形
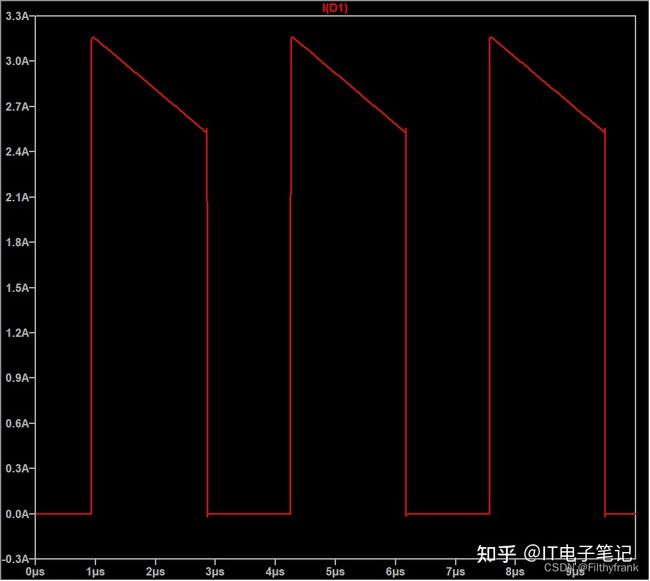
二极管处电流波形:红色波形
仿真波形可以发现,在开关管导通时,流过二极管的电流为0A,开关管关闭时,电感在放电,流过二极管的电流在线性减小。在这个过程中流过二极管的电流是一个变化的,存在峰值电流和平均电流,这时就需要考虑二极管的过流能力。

开关管关断时,流过二极管的电流约大于负载电流,假设流过二极管的平均电流Id,导通压降Vd,那么二极管的平均功率Pd=Id*Vd,
那么对于功率转换来分析,Po=Pl+Pd(Pl表示负载功率)
为了提高输出效率,减小功率损耗,选择二极管时尽量选择导通压降小的管子,让电感储存的能量尽可能多的提供给负载。
为了更进一步的来看二极管电流的变化,仿真中单独将流过二极管的电流波形提取出来,图中发现二极管的电流有一个向下的尖峰,这个尖峰又是什么原因造成呢?这个尖峰又会造成怎样的影响呢?

究其原因,开关管不断的以开关频率在进行开关动作,在这个过程中二极管也不断的在重复导通和截止状态,这个速度是极其快的,它的导通和截止理想情况需与开关频率同步,这样就能让电流完美的进行切换。但实际上理想的二极管并不存在,所以在实际应用中一般选择导通截止开关速度快的肖特基二极管。在这种情况下二极管还是会存在一个反向恢复时间,这样就会在存在一个尖峰。
实际应用中的二极管,在电压突然反向时,二极管电流并不是很快减小到0,而是会有比较大的反向电流存在,这个反向电流降低到最大值的0.1倍所需的时间,就是反向恢复时间。在这个反向恢复时间里,二极管可以通过较大的反向电流,所以在波形图中就出现一个较大的反向电流尖峰。
有了这个尖峰的存在,原理如没有二极管一样,会增加损耗。

LTspice二极管元器件中选择反向恢复时间更短的二极管进行仿真,波形如下图
尖峰几乎可以看不到,这样的仿真过程中能发现,但实际的工程应用中却很难做到,二极管的参数不一致,PCB走线也存在各种分布参数,所以在选型中只能尽可能的去减小尖峰。
一般二极管的数据手册中都会提到反向恢复时间Trr,而这个Trr也会决定二极管工作的频率。

对Boost身边护法帮手二极管来总结一下,指导选型和实际工程应用。
1、 二极管反向电压大于Vo,并留有一定的余量,正向导通压降越小越理想。
2、 二极管平均正向电流If须大于负载最大电流Iload,正向峰值电流Ifsm需大于电感峰值电流Il_peak,并留有余量。
3、 二极管反向恢复时间Trr越小越理想。
3.5 小结
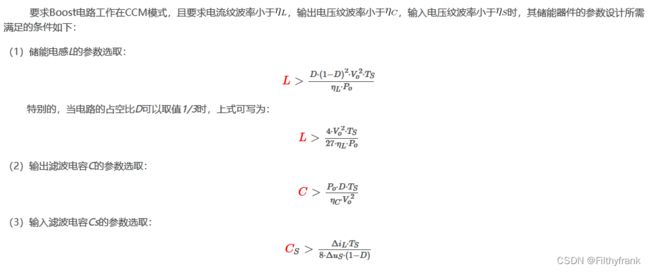
要求Boost电路工作在CCM模式,且要求电流纹波率小于,输出电压纹波率小于,输入电压纹波率小于时,其储能器件的参数设计所需满足的条件如下:
补充:Boost电路硬件设计实例
Boost电路硬件设计实例_Vane Zhang的博客-CSDN博客