CV学习:传统(机器学习)图像识别(分类)
本文代码全部可运行,笔者运行环境:python3.7+pycharm+opencv4.6。此文是学习记录,记录实现图像识别所需知识,对各知识点并不做深入探究,但笔者提供了相关链接以便读者进行深入学习。文章较长,建议收藏;若本文对您有所帮助,希望能够点赞、收藏哦!十分感谢!!!
传统图像识别技术是指利用机器学习进行特征提取与图像分类。图像识别的过程包括信息获取、预处理、特征提取、图像分类。
目录
1. 图像信息获取
2. 图像预处理
2.1. 灰度化
2.1.1. 分量法
2.1.2. 最大值法
2.1.3. 平均值法
2.1.4. 加权平均法
2.1.5. opencv中自带函数
2.2. 几何变换
2.3. 图像增强
2.3.1. 频率域法
2.3.2. 空间域法
3. 图像特征提取
3.1. 图像具有哪些特征呢?
3.2. 常用的传统特征提取算法有哪些?
3.3. 方向梯度直方图算法(HOG)
3.3.1. 特征描述符
3.3.2. HOG
3.3.3. 代码实现
3.4. opencv中的HOG
3.4.1. 定义一个HOG特征符检测器
3.4.2. 代码复现
4. 图像分类
4.1. 常见的分类算法
4.2. 支持向量机算法(SVM)
4.3. opencv中的SVM
4.3.1. 创建模型
4.3.2. 配置参数
4.3.3. 预测结果
4.3.4. 误差分析
4.3.5. 保存模型
4.3.6. 加载模型
4.4. 自定义坐标点的分类
5. 项目实战
5.1. 识别手写数字
6. 参考内容
1. 图像信息获取
简单理解就是把一幅图像转换成适合输入计算机和数字设备的数字信号。这需要要两个部件以获取数字图像:
- 物理设备,该设备对我们希望成像的物体发射的能量很敏感。
- 数字化设备,是一种把物理感知装置的输出转化为数字形式的设备。
常见的图像输入设备有:扫描仪、摄像机、数码相机、图像采集卡等。
2. 图像预处理
图像预处理的主要目的是消除图像中无关的信息,恢复有用的真实信息,增强有关信息的可检测性和最大限度地简化数据,从而改进特征抽取、图像分割、匹配和识别的可靠性。
图像预处理的一般步骤为:灰度化-->几何变换-->图像增强,在具体项目中根据需要进行灵活运用。
2.1. 灰度化
灰度化是将图像转变成灰度图像,一般有分量法、最大值法、平均值法、加权平均法等。
2.1.1. 分量法
表述:图像的灰度值可以是RGB三通道中的任意一通道的亮度值,也就是说可以将图像的R通道值作为灰度值,也可以是G通道或B通道。
数学表达:F(x, y) = R(x, y)或F(x, y) = G(x, y)或F(x, y) = B(x, y)
OpenCv中复现:
def image_gray1(img):
# 分量法灰度化图像
# 判断输入图像是否为灰度图
if len(img.shape) > 2:
b, g, r = img[:, :, 0], img[:, :, 1], img[:, :, 2]
gray = b # B通道值作为灰度值
gray = g # G通道值作为灰度值
gray = r # R通道值作为灰度值
return gray
else:
return img2.1.2. 最大值法
表述:取图像中(x, y)位置像素的RGB通道中的最大值为灰度值。
数学表达:F(x, y) = max(R(x, y), G(x, y), B(x, y))
OpenCv中复现:
def image_gray2(img):
# 最大值法灰度化图像
grayimg = np.zeros(shape=(img.shape[0],img.shape[1]))
if len(img.shape) > 2:
for i in range(img.shape[0]):
for j in range(img.shape[1]):
grayimg[i,j] = max(img[i,j][0], img[i,j][1], img[i,j][2])
return grayimg
else:
return img2.1.3. 平均值法
表述:图像中每个像素的灰度值是其原图像三通道值得平均值。
数学表达:F(x, y) = (R(x, y) + G(x, y) + B(x, y)) / 3
OpenCv中复现:
def image_gray3(img):
# 平均值法灰度化图像
grayimg = np.zeros(shape=(img.shape[0], img.shape[1]))
if len(img.shape) > 2:
for i in range(img.shape[0]):
for j in range(img.shape[1]):
grayimg[i, j] = (int(img[i, j][0])+int(img[i, j][1])+int(img[i, j][2]))/3
return grayimg
else:
return img2.1.4. 加权平均法
表述:每个通道都有加权系数,根据系数计算其加权平均值。
数学表达:F(x, y) = 0.2989R(x, y)+0.5870G(x, y)+0.1140B(x, y)
OpenCv中复现:
def convert2gray(img):
# 加权平均分灰度化图像
if len(img.shape) > 2:
r, g, b = img[:, :, 0], img[:, :, 1], img[:, :, 2]
gray = 0.2989 * r + 0.5870 * g + 0.1140 * b
return gray
else:
return img2.1.5. opencv中自带函数
opencv中内置了两个函数对图像灰度化,即cv2.imread(filaname, cv2.IMREAD_GRAYSCALE)和cv2.cvColor(src, code[, dst[, dstCn]])(转换为灰度图时code = cv2.COLOR_BGR2GRAY)。
2.2. 几何变换
图像几何变换又称为图像空间变换,通过平移、转置、镜像、旋转、缩放等几何变换对采集的图像进行处理,用于改正图像采集系统的系统误差和仪器位置(成像角度、透视关系乃至镜头自身原因)的随机误差。此外,还需要使用灰度插值算法,因为按照这种变换关系进行计算,输出图像的像素可能被映射到输入图像的非整数坐标上。通常采用的方法有最近邻插值、双线性插值和双三次插值。
opencv中的几何变换可见,CV学习:OpenCv快速入门(python版)_水果好好吃哦的博客-CSDN博客
2.3. 图像增强
增强图像中的有用信息,它可以是一个失真的过程,其目的是要改善图像的视觉效果,针对给定图像的应用场合,有目的地强调图像的整体或局部特性,将原来不清晰的图像变得清晰或强调某些感兴趣的特征,扩大图像中不同物体特征之间的差别,抑制不感兴趣的特征,使之改善图像质量、丰富信息量,加强图像判读和识别效果,满足某些特殊分析的需要。
图像增强可分成两大类:频率域法和空间域法。
2.3.1. 频率域法
频率域法把图像看成一种二维信号,对其进行基于二维傅里叶变换的信号增强。
高频图像是指强度变化很多的图像,亮度水平从一个像素到另一个像素变化很快。低频图像可能是亮度比较均匀或变化很慢的图像。
频率域法是一种间接图像增强算法,把图像看成一种二维信号,对其进行基于二维傅里叶变换的信号增强。采用低通滤波(即只让低频信号通过)法,可去掉图中的噪声;采用高通滤波法,则可增强边缘等高频信号,使模糊的图片变得清晰。

opencv中频率域图像滤波的有关算法见:
【youcans的OpenCV例程300篇】总目录_youcans_的博客-CSDN博客
2.3.2. 空间域法
空间域图像增强技术指在空间域中,通过线性和非线性变换来增强构成图像的像素
增强的方法主要分为点运算算法、形态学运算法、邻域增强算法。
点运算法
点运算算法即灰度级校正、灰度变换(伽马变换、对数增强)和直方图修正等,目的或使图像成像均匀,或扩大图像动态范围,扩展对比度。
opencv中灰度变换与直方图见:
【youcans的OpenCV例程300篇】总目录_youcans_的博客-CSDN博客
形态学运算法
图像处理中的形态学是指基于形状的图像处理操作,以数学形态学为工具从图像中提取表达和描绘区域形状的图像结构信息,还包括用于预处理或后处理的形态学过滤、细化和修剪等。
opencv中形态学图像处理见:
【youcans的OpenCV例程300篇】总目录_youcans_的博客-CSDN博客
邻域增强算法
邻域增强算法分为图像平滑和锐化两种。平滑一般用于消除图像噪声,但是也容易引起边缘的模糊。常用算法有均值滤波、中值滤波。锐化的目的在于突出物体的边缘轮廓,便于目标识别。锐化常用算法有梯度法(如Roberts梯度法)、算子法(Sobel算子和拉普拉斯算子等)、掩模匹配法、统计差值法等常用算法有梯度法、算子、高通滤波、掩模匹配法、统计差值法等。
opencv中空间域图像滤波见:
【youcans的OpenCV例程300篇】总目录_youcans_的博客-CSDN博客
3. 图像特征提取
特征提取的英文叫做feature extractor,它是将一些原始的输入的数据维度减少或者将原始的特征进行重新组合以便于后续的使用。简单来说有两个作用:减少数据维度,整理已有的数据特征。
3.1. 图像具有哪些特征呢?
- 几何特征。包括位置与方向、周长、面积、轴长、距离(例如欧式距离、曼哈顿距离、切比雪夫距离、余弦距离)。
- 形状特征。圆度、矩形度、惯性比、偏心率等。
- 幅值特征。
- 颜色特征(颜色直方图、颜色矩)。
- 直方图特征(统计特征):均值、方差、能量、熵、L1范数、L2范数等;直方图特征方法计算简单、具有平移和旋转不变性、对颜色像素的精确空间分布不敏感等,在表面检测、缺陷识别有不少应用。
- 局部二值模式( LBP)特征:LBP对诸如光照变化等造成的图像灰度变化具有较强的鲁棒性,在表面缺陷检测、指纹识别、光学字符识别、人脸识别及车牌识别等领域有所应用。由于LBP 计算简单,也可以用于实时检测。
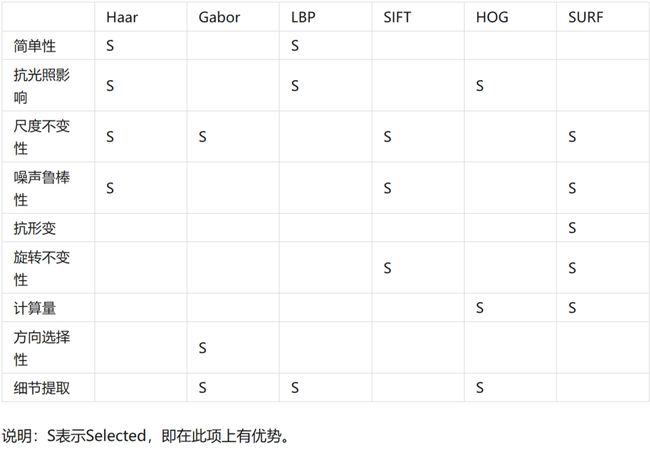
3.2. 常用的传统特征提取算法有哪些?
Haar、Gabor、LBP、SIFI、HOG、SURF等算法。
| Haar |
Gabor |
LBP |
|
| 概述 |
Haar特征通常被用来检测图像中的局部特征,如边缘、线和角等。Haar特征是通过在图像中滑动一个固定大小的窗口,并计算窗口内像素的灰度差异来确定的。这些特征通常由矩形区域的亮度差异组成,其中矩形区域可以是水平、竖直或对角线方向的。 |
在计算机视觉中,Gabor滤波器通常被用来检测图像中的纹理和边缘等特征。它可以通过在图像上滑动一个Gabor核来提取特定方向、尺度和频率的特征,从而生成滤波响应图像。Gabor滤波器的参数包括中心频率、方向、尺度和带宽等。 |
LBP(Local Binary Pattern,局部二值模式)是一种用于图像分析和计算机视觉的特征描述符。它可以对图像中的纹理和结构进行描述,并且非常适合于目标检测、人脸识别、纹理分类等应用。 |
| 优点 |
简单有效、不受光照影响、不受目标大小变化影响、鲁棒性好、可以结合其他方法使用 |
较好的方向选择性、尺度不变性、可以提取细节信息、可以结合其他方法使用 |
计算简单、不受光照变化影响、可以处理局部纹理特征、可以与其他方法结合 |
| 缺点 |
对目标旋转敏感、计算复杂度高、只适用于灰度图像、对目标变形敏感 |
计算复杂度高、对图像噪声敏感、对光照变化敏感、参数选择困难 |
对噪声敏感、不具备旋转不变性、不能描述全局纹理信息 |
| 应用场景 |
人脸、人眼检测,车牌检测 |
纹理分析、人脸识别、指纹识别、目标检测 |
图形分类目标检测、人脸识别 |
| SIFT |
HOG |
SURF |
|
| 概述 |
SIFT(Scale-Invariant Feature Transform:尺度不变特性变换)是一种在计算机视觉领域中广泛应用的特征提取算法。它能够在不同的尺度和旋转角度下提取出图像中的关键点,并计算出这些关键点的局部特征描述子,从而实现图像的匹配和识别。 |
HOG(Histograms of Oriented Gradients:定向梯度直方图)是一种基于图像梯度的特征提取方法,被广泛应用于计算机视觉和机器学习领域 |
SURF(Speeded Up Robust Features)是一种用于图像特征提取和匹配的算法,它是 SIFT(Scale-Invariant Feature Transform)算法的改进版本。SURF 算法通过快速的图像特征提取和匹配,可以在大规模图像数据集上实现高效的识别和匹配。 |
| 优点 |
较好的尺度不变性、旋转不变性、抗噪性能、匹配准确性 |
较好的局部特征、光照不变性、计算效率、可扩展性 |
计算速度快、尺度不变性和旋转不变性、鲁棒性好、可扩展 |
| 缺点 |
计算量大、对图像畸变敏感、对亮度变化敏感、不适用于快速移动目标 |
对目标旋转和缩放不具有完全的不变性、对图像噪声敏感、不适用于高速运动目标 |
对旋转和仿射变换的鲁棒性不如其他算法、对光照变化和噪声敏感、特征点数量不稳定 |
| 应用场景 |
图像匹配和识别,例如目标跟踪、三维重建、图像检索等 |
人脸检测、行人检测、车辆检测、图像分类,单目标跟踪 |
目标检测、图像拼接、三维重建、相机定位、视频跟踪 |
3.3. 方向梯度直方图算法(HOG)
3.3.1. 特征描述符
特征描述符是通过提取图像的有用信息,并且丢弃无关信息来简化图像的表示。
HOG特征描述符可以将3通道的彩色图像或者单通道的灰度图转换成一定长度的特征向量。而且HOG描述符多和SVM配合使用,用于训练高精度的目标分类器。
关于特征值和特征向量:
我们知道,一个变换可由一个矩阵乘法表示,那么一个空间坐标系也可视作一个矩阵,而这个坐标系就可由这个矩阵的所有特征向量表示,用图来表示的话,可以想象就是一个空间张开的各个坐标角度,这一组向量可以完全表示一个矩阵表示的空间的“特征”,而他们的特征值就表示了各个角度上的能量(可以想象成从各个角度上伸出的长短,越长的轴就越可以代表这个空间,它的“特征”就越强,或者说显性,而短轴自然就成了隐性特征),因此,通过特征向量/值可以完全描述某一几何空间这一特点,使得特征向量与特征值在几何(特别是空间几何)及其应用中得以发挥。
3.3.2. HOG
HOG是由Navneet Dalal和Bill Triggs在2005年提出,本小节简单介绍一下原理以及opencv中的HOG描述符。
图像预处理
变换图像大小,使其成为64*128大小的图像,一般为灰度图。但并不要求是灰度图,因为灰度图像和彩色图像都可以用于计算梯度图,对于彩色图像,先对三通道颜色值分别计算梯度,然后取梯度值最大的那个作为该像素的梯度。
论文中提及了需要先进行gamma校正,关于gamma校正的具体内容见Gamma校正原理及实现_伽马校正公式_零钱币的博客-CSDN博客
计算梯度图
首先使用ksize=1的Sobel内核对图像的x轴、y轴进行梯度近似计算(中心差分),然后再利用公式计算其幅值(合梯度大小)和幅度(合梯度方向)。
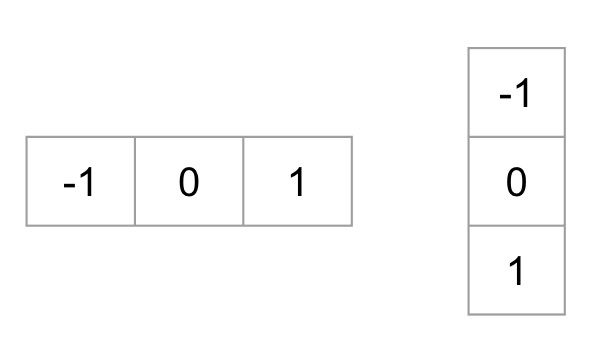
幅值和幅度的计算公式,需要注意的是,梯度方向会取绝对值,因此得到的角度范围是 [0,180°](当然也可以使用有符号梯度,此时角度范围[0, 360])。
import cv2
import numpy as np
# 读取图像
runner = cv2.imread('image\\runner.jpg', cv2.IMREAD_COLOR)
# 预处理
runner2 = cv2.resize(runner, dsize=(64, 128))
# gamma校正
runner2 = np.power(runner2/255.0, 1.5)
# 计算x、y轴梯度
gx = cv2.Sobel(runner2, ddepth=-1, dx=1, dy=0, ksize=1)
gy = cv2.Sobel(runner2, ddepth=-1, dx=0, dy=1, ksize=1)
# 计算幅值和幅度
mag, angle = cv2.cartToPolar(gx, gy, angleInDegrees=True)
combined = np.hstack((gx, gy, mag, angle))
cv2.imshow('gx, gy, amg, angle', combined)
while 1:
if cv2.waitKey() == ord('q'):
break
cv2.destroyAllWindows()
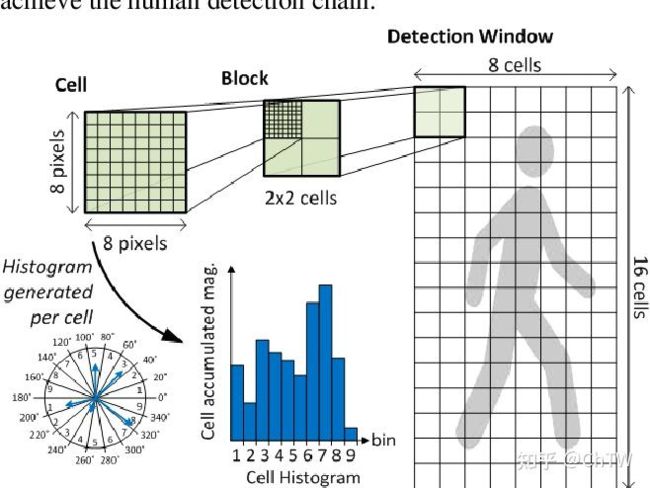
计算cell梯度直方图
利用已经计算出的每个像素的幅值、幅度绘制cell梯度直方图。一般将幅度范围划分为9个bin,即将无符号[0, 180](或有符号[0, 360])划分为9个方向块作为横轴,将幅值根据某种规则划分到不同bin中,cell中每个bin的累加和就是直方图的纵轴值。
根据Dalal等人的实验,在行人目标检测中,在无符号方向角度范围并将其平均分成9份(bins)能取得最好的效果,当bin的数目继续增大效果改变不明显,故一般在人体目标检测中使用bin数目为9范围0~180°的度量方式。
Block(描述子)归一化
由于局部光照的变化,以及前景背景对比度的变化,使得梯度强度的变化范围非常大,这就需要对梯度做局部对比度归一化。归一化能够进一步对光照、阴影、边缘进行压缩,使得特征向量对光照、阴影和边缘变化具有鲁棒性。
具体的做法:将细胞单元组成更大的空间块(block),然后针对每个块进行对比度归一化。最终的描述子是检测窗口内所有块内的细胞单元的直方图构成的向量。事实上,块之间是有重叠的,也就是说,每个细胞单元的直方图都会被多次用于最终的描述子的计算。块之间的重叠看起来有冗余,但可以显著的提升性能 。
提取HOG特征
最后一步就是对一个样本中所有的块进行HOG特征的提取,并将它们结合成最终的特征向量送入分类器。
那么一个样本可以提取多少个特征呢?之前我们已经说过HOG特征的提取过程:
- 首先把样本图片分割为若干个像素的单元,然后把梯度方向划分为9个区间,在每个单元里面对所有像素的梯度方向在各个方向区间进行直方图统计,得到一个9维的特征向量;
- 每相邻4个单元构成一个块,把一个块内的特征向量串联起来得到一个36维的特征向量;
- 用块对样本图像进行扫描,扫描步长为一个单元的大小,最后将所有的块的特征串联起来,就得到一个样本的特征向量;
例如:对于128×64128×64的输入图片(后面我所有提到的图像大小指的是h×w),每个块由2×2个cell组成,每个cell由8×8个像素点组成,每个cell提取9个bin大小的直方图,以1个cell大小为步长,那么水平方向有15个扫描窗口,垂直方向有7个扫描窗口,也就是说,一共有15∗7∗2∗2∗9=3780个特征。
3.3.3. 代码实现
opencv中没有提供简单的方法可视化HOG描述符,因此这里使用scikit-image库。先让我们来了解一下feature.hog()函数。
语法:feature.hog(image, orientations=9, pixels_per_cell=(8, 8), cells_per_block=(3, 3), visualize=False, multichannel=None)--->fd, hog_image
参数:
orientations---要创建的bucket的数量,默认为9。
pixels_per_cell---单元格的大小,默认为8。可以简单理解为与HOG的信息紧凑性、抗噪声性能有关。
cells_per_block---Block的大小,单位是cell。可以简单理解与HOG的抗光照能力有关。
visualize---True,表示输出hog_image;False,表示不输出hog_image。
multichannel---None,表示输入的是单通道;True,可以输入多通道图。
返回:fd---函数的特征矩阵;hog_image---HOG描述符图像。
import cv2
import numpy as np
from skimage import feature, exposure
runner = cv2.imread('image\\runner.jpg', cv2.IMREAD_COLOR)
# 将图像尺寸调整为64*128
runner_copy = cv2.resize(runner, dsize=(200, 400))
fd, hog_image = feature.hog(runner_copy, orientations=9, pixels_per_cell=(10, 10),
cells_per_block=(2, 2), visualize=True, multichannel=True)
# 重新缩放直方图以获得更好的显示效果
hog_image_rescaled = exposure.rescale_intensity(hog_image, in_range=(0, 10))
combined = np.hstack((hog_image, hog_image_rescaled))
cv2.imshow('11', combined)
while 1:
if cv2.waitKey(0) == ord('q'):
break
cv2.destroyAllWindows()
3.4. opencv中的HOG
3.4.1. 定义一个HOG特征符检测器
语法:
hog=cv2.HOGDescriptor(winSize, blocSize, blockStride, cellSize, nbins, derivAperture, winSigma, histogramNormType, L2HysThreshold, gammaCorrection, nlevels, signedGradients)
参数:
winSize---检测窗口大小。
blockStride---块步幅确定相邻块之间的重叠并控制对比度归一化程度。通常,块步幅设置为块大小的 50%。
blockSize---block是为了是为了抗光照影响而设计的。较大的块使局部图像的梯度直方图作用减弱,而较小的块则使局部图像的权重较大。通常,blockSize 设置为 2 x cellSize
cellSize---单元格的大小,直接影响图像特征向量的大小。非常小的单元格会放大特征向量的大小,而非常大的单元格可能无法捕获相关信息。因此cellSize十分重要,应通过比较确定。
nbins---方向梯度直方图的条目数,积将梯度方向角度范围均分的份数,HOG论文的作者建议值为9。
signedGradients---True,有符号梯度,梯度方向角度范围[0, 360];False---无符号梯度,梯度方向角度范围[0, 180]。在最初的HOG论文中,无符号梯度用于行人检测。
检测器的函数方法:
checkDetectorSize()---检查检测器大小是否等于描述符大小。
compute(img)---计算输入图像的特征向量。 --->descriptors
computeGradient(img, grad, angleOfs)---计算梯度和量化梯度方向.--->grad, angleOfs
detect(img)---在没有多尺度窗口的情况下执行对象检测。 --->foundLocations, weights
detectMultiScale(img)---检测输入图像中不同尺度大小的对象。检测到的对象以矩形列表的形式返回。 --->foundLocations, foundWeights
getDescriptorSize()---获取检测窗口的HOG特征向量的维数。 --->retcal
getWinSigma()---返回 winSigma 值。 --->retcal
save(filename[, objname])---将线性 SVM 分类器的 HOGDescriptor 参数和系数保存到文件中。 --->None
3.4.2. 代码复现
def get_hog():
winSize = (20, 20)
blockSize = (8, 8)
blockStride = (4, 4)
cellSize = (8, 8)
nbins = 9
derivAperture = 1 # 默认参数
winSigma = -1. # 默认参数
histogramNormType = 0 # 默认参数
L2HysThreshold = 0.2 # 默认参数
gammaCorrection = 1 # 默认参数
nlevels = 64 # 默认参数
signedGradient = True
hog = cv2.HOGDescriptor(winSize, blockSize, blockStride, cellSize, nbins, derivAperture, winSigma,
histogramNormType, L2HysThreshold, gammaCorrection, nlevels, signedGradient)
return hog4. 图像分类
图像分类(Image Classification)是对图像内容进行分类的问题,它利用计算机对图像进行定量分析,把图像或图像中的区域划分为若干个类别,以代替人的视觉判断。图像分类的传统方法是特征描述及检测,这类传统方法可能对于一些简单的图像分类是有效的。
4.1. 常见的分类算法
常见的分类算法包括朴素贝叶斯分类器、决策树、K最近邻分类算法、支持向量机、神经网络和基于规则的分类算法等,同时还有用于组合单一类方法的集成学习算法,如Bagging和Boosting等。
| 概述 |
特点 |
|
| 朴素贝叶斯分类算法 (Naive Bayes Classifier) |
发源于古典数学理论,利用Bayes定理来预测一个未知类别的样本属于各个类别的可能性,选择其中可能性最大的一个类别作为该样本的最终类别。在朴素贝叶斯分类模型中,它将为每一个类别的特征向量建立服从正态分布的函数,给定训练数据,算法将会估计每一个类别的向量均值和方差矩阵,然后根据这些进行预测。 |
如果没有很多数据,该模型会比很多复杂的模型获得更好的性能,因为复杂的模型用了太多假设,以致产生欠拟合。 |
| KNN分类算法(K-Nearest Neighbor Classifier) |
是一种基于实例的分类方法,是数据挖掘分类技术中最简单常用的方法之一。该算法的核心思想如下:一个样本x与样本集中的k个最相邻的样本中的大多数属于某一个类别yLabel,那么该样本x也属于类别yLabel,并具有这个类别样本的特性。 |
简单有效,但因为需要存储所有的训练集,占用很大内存,速度相对较慢,使用该方法前通常训练集需要进行降维处理。 |
| SVM分类算法(Support Vector Machine) |
根据统计学习理论提出的一种新的学习方法,其基本模型定义为特征空间上间隔最大的线性分类器,其学习策略是间隔最大化,最终转换为一个凸二次规划问题的求解。SVM基于核函数把特征向量映射到高维空间,建立一个线性判别函数,解最优在某种意义上是两类中距离分割面最近的特征向量和分割面的距离最大化。离分割面最近的特征向量被称为“支持向量”,即其它向量不影响分割面。图像分类中的SVM如下图所示,将图像划分为不同类别。 |
当数据集比较小的时候,支持向量机的效果非常好。同时,SVM分类算法较好地解决了非线性、高维数、局部极小点等问题,维数大于样本数时仍然有效。 |
| 随机森林分类算法(Random Forest) |
是用随机的方式建立一个森林,在森林里有很多决策树的组成,并且每一棵决策树之间是没有关联的。当有一个新样本出现的时候,通过森林中的每一棵决策树分别进行判断,看看这个样本属于哪一类,然后用投票的方式,决定哪一类被选择的多,并作为最终的分类结果。 |
在分类和回归分析中都表现良好;对高维数据的处理能力强,可以处理成千上万的输入变量,也是一个非常不错的降维方法;能够输出特征的重要程度,能有效地处理缺省值。 |
4.2. 支持向量机算法(SVM)
支持向量机通俗导论(理解SVM的三层境界)_v_JULY_v的博客-CSDN博客
4.3. opencv中的SVM
opencv中集成了基于LIBSVM实现的SVM接口,便于直接进行调用。在opencv中训练完模型后,可将SVM模型保存为xml文件,可以在实时性应用中通过C++接口调用参数文件,进行实时推断。
SVM继承自StatModel和Algorithm类。在opencv中使用SVM的一般流程如下:

4.3.1. 创建模型
语法:cv2.ml.SVM_create()--->retval
作用:创建一个空模型。
4.3.2. 配置参数
| SVM模型 |
与优化有关的参数 |
用途 |
|
| SVM_C_SVC |
C |
分类 |
|
| NU_SVC |
Nu |
||
| ONE_CLASS |
C |
Nu |
|
| EPS_SVR |
C |
P |
回归 |
| NU_SVR |
C |
Nu |
|
| SVM核函数 |
核函数表达式 |
与核函数有关的参数 |
||
| SVM_LINEAR (线性内核) |
|
|||
| SVM_POLY (多项式内核) |
|
Gamma(γ>0) |
Coef0 |
Degree |
| SVM_RBF (径向基内核) |
|
Gamma(γ>0) |
||
| SVM_SIGMOID (sigmoid内核) |
|
Gamma(γ>0) |
Coef0 |
|
| SVM_CHI2 (指数卡方分布内核) |
k(xi, xj) = exp(γxiTxj+cofe0) |
Gamma(γ>0) |
||
| SVM_INTER (直方图交运算内核) |
k(xi, xj) = min(xi, xj) |
|||
表格参考自:https://www.cnblogs.com/xixixing/p/12377090.html
setType(val)---> None
val = cv2.ml.SVM_C_SVC,即数100。C-支持向量分类。n级分类(n≥ 2) 允许使用异常值的惩罚乘数 C 不完全地分离类。
val = cv2.ml.SVM_NU_SVC,即数101。ν-支持向量分类。n级分类,可能有不完美的分离。参数ν用于代替C,参数ν在0-1范围内,值越大,决策边界越平滑。
val = cv2.ml.SVM_ONE_CLASS,即数102。分布估计,所有的训练数据都来自同一个类,SVM 构建了一个边界,将类与特征空间的其余部分分开。
val = cv2.ml.SVM_EPS_SVR,即数103。ε-支持向量回归。来自训练集的特征向量和拟合超平面之间的距离必须小于p。对于异常值,使用惩罚乘数 C。
val = cv2.ml.SVM_NU_SVR,即数104。ν-支持向量回归。 ν用于代替 p。
补充:
SVM=Support Vector Machine 是支持向量
SVC=Support Vector Classification就是支持向量机用于分类
SVR=Support Vector Regression.就是支持向量机用于回归分析
setC(val)--->None
C值较大时:误分类错误较少,但余量较小。这种情况下,侧重于寻找具有很少的误分类错误的超平面。
C值较小时:具有更大余量和更多分类错误。在这种情况下,更侧重于寻找具有大余量的超平面。
默认值为[0.1 500]。
setP(val)---> None
默认为[0.01, 100]。
setNu(val)---> None
默认为[0.01, 0.2]。
setKernel(kernelType)---> None
kernelType = cv2.ml.SVM_CUSTOM,默认为-1。由SVM::getKernelType返回,默认是RBF。
kernelType = cv2.ml.SVM_LINEAR,默认为0。线性内核,速度最快。
kernelType = cv2.ml.SVM_POLY,默认为1。多项式核。
kernelType = cv2.ml.SVM_RBF,默认为2。径向基函数(RBF),大多数情况下是个不错的选择。
kernelType = cv2.ml.SVM_SIGMOID,默认为3。sigmoid核。
kernelType = cv2.ml.SVM_CHI2,默认为4。Chi2核,类似于RBF核。
kernelType = cv2.ml.SVM_INTER,默认为5。直方图交叉核,速度较快。
setGamma(val)---> None
默认为[1e-5, 0.6]。
setDegree(val)---> None
默认为[0.01, 4]。
setCoef0(val)---> None
默认为[0.1, 300]。
setClassWeights(val)---> None
setTermCriteria((type, maxCount, epsilon))---> None
参数:
type---终止迭代的类型。cv2.TERM_CRITERIA_MAX_ITER,cv2.TERM_CRITERIA_COUNT,以最大迭代次数控制迭代终止;cv2.TERM_CRITERIA_EPS,以迭代算法精度控制迭代终止。
maxCount---最大的迭代次数;
epsilon---迭代算法所需要的精度。
- 训练模型
语法:
trainAuto(samples, layout, responses[, kFold[, Cgrid[, gammaGrid[, pGrid[, nuGrid[, coeffGrid[, degreeGrid[, balanced]]]]]]]])---> retval
train(samples, layout, responses)---> retval
参数:
samples---训练样本的特征向量集,是以矩阵形式输入的。
layout---cv2.ml.ROW_SAMPLE,表示每个训练样本是行向量;cv2.ml.COL_SAMPLE,表示每个训练样本是列向量。
responses---与训练样本有关的响应(标签)向量。
kFold---k交叉验证,训练集会分成k个子集,从中选取一个用来测试,剩余k-1个用来训练。
balanced---如果设为True且是2-class分类问题,方法会自动创建更平衡的交叉验证子集,即子集中的类之间比例接近整个训练数据集中的比例。
4.3.3. 预测结果
语法:
predict(samples[, results[, flags]]---> retval, results
参数:
samples---测试样本的向量集,是以矩阵形式输入的。
注意:测试样本的结果标签存储在result.ravel()中。
4.3.4. 误差分析
calcError(data, test[, resp])---> retval, resp
4.3.5. 保存模型
save(filename)---> None
4.3.6. 加载模型
load(filepath) -> retval
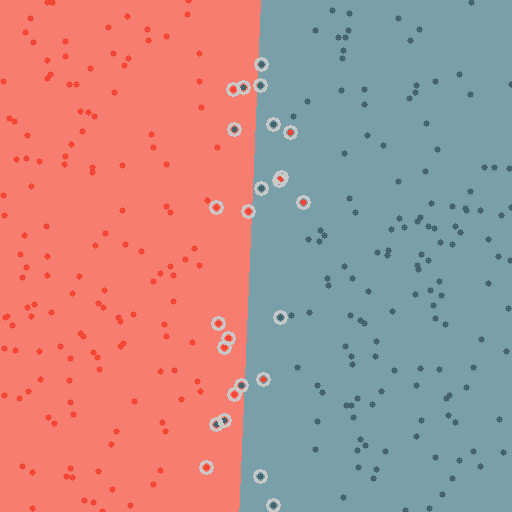
4.4. 自定义坐标点的分类
import cv2
import numpy as np
import random
# 设置显示框
width = 512
height = 512
win = np.zeros((height, width, 3), dtype=np.uint8)
def training_data(training_sample, sep):
global win
# 自定义数据集
# 每个类别的训练样本数量
training_samples = training_sample
# 线性可分的样本比例
frac_linear_sep = sep
# 设置训练样本和标签
train_data = np.empty((training_samples * 2, 2), dtype=np.float32)
labels = np.empty((training_samples * 2, 1), dtype=np.int32)
# 随机数种子
random.seed(100)
# 线性可分的样板训练数量
linear_samples = int(frac_linear_sep * training_samples)
# 创建线性可分class1,class1内的点坐标x∈[0, 0.4*width), y∈[0, 512)
train_class = train_data[0:linear_samples, :]
# 定义点的x坐标
c = train_class[:, 0:1]
c[:] = np.random.uniform(0.0, 0.4 * width, c.shape)
# 定义点的y坐标
c = train_class[:, 1:2]
c[:] = np.random.uniform(0.0, height, c.shape)
# 创建线性可分class2,class2内的点坐标x∈[0.6, width), y∈[0, 512)
train_class = train_data[(training_samples * 2 - linear_samples):training_samples * 2, :]
# 定义点的x坐标
c = train_class[:, 0:1]
c[:] = np.random.uniform(0.6 * width, width, c.shape)
# 定义点的y坐标
c = train_class[:, 1:2]
c[:] = np.random.uniform(0.0, height, c.shape)
# 创建线性不可分class,class内的点坐标x∈[0.4*width, 0.6*width), y∈[0, 512)
train_class = train_data[linear_samples:(training_samples * 2 - linear_samples), :]
# 定义点的x坐标
c = train_class[:, 0:1]
c[:] = np.random.uniform(0.4 * width, 0.6 * width, c.shape)
# 定义点的y坐标
c = train_class[:, 1:2]
c[:] = np.random.uniform(0.0, height, c.shape)
# 创建class1与class2的标签
labels[0:training_samples, :] = 1
labels[training_samples:training_samples * 2, :] = 2
return train_data, labels
def SVM_Model():
# 创建一个参数已经定义的模型model
model = cv2.ml.SVM_create()
model.setType(cv2.ml.SVM_C_SVC)
model.setC(0.1)
model.setKernel(cv2.ml.SVM_LINEAR)
model.setTermCriteria((cv2.TERM_CRITERIA_MAX_ITER, int(1e7), 1e-6))
return model
def train_model(model, samples, layout, reponses):
# 训练SVM模型
model.train(samples, layout, reponses)
return model
def display_area(model, color1, color2):
global win
# 显示决策区域
for i in range(win.shape[0]):
for j in range(win.shape[1]):
sample_mat = np.matrix([[j, i]], dtype=np.float32)
response = model.predict(sample_mat)[1]
if response == 1:
win[i, j] = color1
else:
win[i, j] = color2
def display_class(model, train_data, color1, color2, training_samples):
global win
# 按类显示训练数据中的点
for i in range(training_samples):
px = train_data[i, 0]
py = train_data[i, 1]
cv2.circle(win, (int(px), int(py)), 3, color1, -1)
for i in range(training_samples, 2*training_samples):
px = train_data[i, 0]
py = train_data[i, 1]
cv2.circle(win, (int(px), int(py)), 3, color2, -1)
sv = model.getUncompressedSupportVectors()
for i in range(sv.shape[0]):
cv2.circle(win, (int(sv[i, 0]), int(sv[i, 1])), 6, (200, 200, 200), 2)
if __name__ == '__main__':
training_samples = 150
frac_linear_sep = 0.9
print('创建训练数据'.center(50, '-'))
train_data, labels = training_data(training_samples, frac_linear_sep)
print('创建SVM模型'.center(50, '-'))
svm_model = SVM_Model()
print('训练SVM模型'.center(50, '-'))
svm_model = train_model(svm_model, train_data, cv2.ml.ROW_SAMPLE, labels)
print('显示决策区域'.center(50, '-'))
display_area(svm_model, (112, 125, 247), (168, 159, 121))
print('按类显示训练数据中的点'.center(50, '-'))
display_class(svm_model, train_data, (52, 70, 244), (107, 100, 69), training_samples)
cv2.imshow('111', win)
while 1:
if cv2.waitKey(0) == ord('q'):
break
cv2.destroyAllWindows()运行结果:
5. 项目实战
5.1. 识别手写数字
import cv2
import numpy as np
# 本地模块common
from common import clock, mosaic
SZ = 20
CLASS_N = 10
def split2d(img, cell_size, flatten=True):
"""
将图像按照cell_size尺寸分割,将分割后的数组放置在一个新数组中并返回
:param img: 将要被分割的图像
:param cell_size: 分割尺寸
:param flatten: 是否扁平化从的标志
:return: img分割后的图像数组集
"""
h, w = img.shape[:2]
sx, sy = cell_size
cells = []
# 按行切分输入的图像
for row in np.vsplit(img, h//sy):
cells.append(np.hsplit(row, w // sx))
# 将列表转换称数组,shape=(h//sy, w//sx, sy, sx)
cells = np.array(cells)
if flatten:
# 将数组cells转为三维数组,shape=((h//sy)*(w//sx), sy, sx),(h//sy)*(w//sx)是切割后的图像数量
cells = cells.reshape((-1, sy, sx))
return cells
# 建立训练资源库和标签组
def load_digits(fn):
"""
建立训练资源库和对应的标签组
:param fn:输入图片的位置
:return:分割后的图像集合以及对应的标签组
"""
digits_img = cv2.imread(fn, 0)
# 通过split2d()函数分割读取的图像
digits = split2d(digits_img, (SZ, SZ))
# 建立[0, 9]的整数类,对应手写数字,数量与len(digits)同
labels = np.repeat(np.arange(CLASS_N), len(digits) / CLASS_N)
return digits, labels
# 纠偏
def deskew(img):
"""
判断图像倾斜是否在[0,1e-2)之内,若在返回一个副本,否则返回一个经过错切的图像
:param img: 输入图像
:return: 返回一个在倾斜角度内的图像
"""
m = cv2.moments(img)
if abs(m['mu02']) < 1e-2:
return img.copy()
skew = m['mu11'] / m['mu02']
# 创建错切矩阵
M = np.float32([[1, skew, -0.5 * SZ * skew], [0, 1, 0]])
# 错切变换
img = cv2.warpAffine(img, M, (SZ, SZ), flags=cv2.WARP_INVERSE_MAP | cv2.INTER_LINEAR)
return img
def svmInit(C=12.5, gamma=0.50625):
"""
创建并配置SVM模型
:param C: 参数C
:param gamma: 参数Gamma
:return: 返回一个已经配置完参数的SVM模型
"""
# 创建一个空SVM模型
model = cv2.ml.SVM_create()
model.setGamma(gamma)
model.setC(C)
# SVM核为SVM_RBF,需要有对应的Gamma参数
model.setKernel(cv2.ml.SVM_RBF)
# SVM类型为SVM_C_SVC,需要有对应的C参数
model.setType(cv2.ml.SVM_C_SVC)
return model
def svmTrain(model, samples, responses):
"""
返回经过训练的模型
:param model: 将要被训练的模型
:param samples: 训练数据
:param responses: 数据对应的标签
:return: 返回经过训练的模型
"""
model.train(samples, cv2.ml.ROW_SAMPLE, responses)
return model
def svmPredict(model, samples):
"""
返回模型对测试数据的预测结果
:param model: 已经训练好的模型
:param samples: 测试用的图像的特征向量
:return: 返回模型对测试数据的预测结果
"""
return model.predict(samples)[1].ravel()
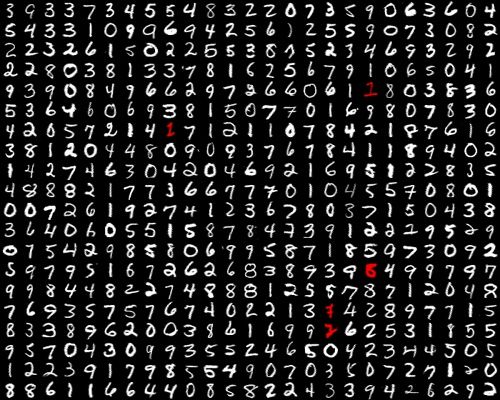
def svmEvaluate(model, digits, samples, labels):
"""
返回一个打乱了的测试数据集,其中预测错误的数据是红色的
:param model: 已经训练好的模型
:param digits: 测试用的数据
:param samples: 测试用的数据的特征向量
:param labels: 测试用的数据对应的标签
:return: 返回一个打乱了的测试数据集,其中预测错误的数据是红色的
"""
predictions = svmPredict(model, samples)
accuracy = (labels == predictions).mean()
print('预测准确率: %.2f %%' % (accuracy * 100))
confusion = np.zeros((10, 10), np.int32)
for i, j in zip(labels, predictions):
confusion[int(i), int(j)] += 1
print('confusion matrix:')
print(confusion)
print(sum(sum(confusion)))
vis = []
for img, flag in zip(digits, predictions == labels):
img = cv2.cvtColor(img, cv2.COLOR_GRAY2BGR)
if not flag:
img[..., :2] = 0
vis.append(img)
return mosaic(25, vis)
# 图像归一化
def preprocess_simple(digits):
return np.float32(digits).reshape(-1, SZ * SZ) / 255.0
def get_hog():
"""
:return: 返回一个获得HOG描述符的函数
"""
winSize = (20, 20)
blockSize = (8, 8)
blockStride = (4, 4)
cellSize = (8, 8)
nbins = 9
derivAperture = 1
winSigma = -1.
histogramNormType = 0
L2HysThreshold = 0.2
gammaCorrection = 1
nlevels = 64
signedGradient = True
hog = cv2.HOGDescriptor(winSize, blockSize, blockStride, cellSize, nbins, derivAperture, winSigma,
histogramNormType, L2HysThreshold, gammaCorrection, nlevels, signedGradient)
return hog
if __name__ == '__main__':
print('加载本地图片 ... ')
# 本地数据
digits, labels = load_digits("image\\digits.png")
print('打乱数据 ... ')
# 打乱数据
rand = np.random.RandomState(10)
shuffle = rand.permutation(len(digits))
digits, labels = digits[shuffle], labels[shuffle]
print('纠偏 ... ')
# 纠偏
digits_deskewed = list(map(deskew, digits))
print('定义HOG参数 ...')
# 定义HOG参数
hog = get_hog()
print('提取每张图片的HOG特征向量 ... ')
hog_descriptors = []
# 提取提取每张图像的特征向量,并添加到列表hog_descriptors
for img in digits_deskewed:
hog_descriptors.append(hog.compute(img))
hog_descriptors = np.squeeze(hog_descriptors)
print('将数据集分成两份,90%用于训练,10%用于测试... ')
train_n = int(0.9 * len(hog_descriptors))
digits_train, digits_test = np.split(digits_deskewed, [train_n])
hog_descriptors_train, hog_descriptors_test = np.split(hog_descriptors, [train_n])
labels_train, labels_test = np.split(labels, [train_n])
print('训练SVM模型 ...')
model = svmInit()
svmTrain(model, hog_descriptors_train, labels_train)
print('Evaluating model ... ')
vis = svmEvaluate(model, digits_test, hog_descriptors_test, labels_test)
cv2.imwrite("digits-classification.jpg", vis)
cv2.imshow("Vis", vis)
cv2.waitKey(0)
cv2.destroyAllWindows()
'''
加载本地图片 ...
打乱数据 ...
纠偏 ...
定义HOG参数 ...
提取每张图片的HOG特征向量 ...
将数据集分成两份,90%用于训练,10%用于测试...
训练SVM模型 ...
Evaluating model ...
预测准确率: 99.00 %
confusion matrix:
[[52 0 0 0 0 0 0 0 0 0]
[ 0 43 2 0 0 0 0 0 0 0]
[ 0 0 61 0 0 0 0 1 0 0]
[ 0 0 0 49 0 0 0 0 0 0]
[ 0 0 0 0 44 0 0 0 0 0]
[ 0 0 0 0 0 49 0 0 0 0]
[ 0 0 0 0 0 0 46 0 0 0]
[ 0 0 0 0 0 0 0 50 1 0]
[ 0 0 0 0 0 1 0 0 50 0]
[ 0 0 0 0 0 0 0 0 0 51]]
500
'''输出图片:
6. 参考内容
- Image Recognition and Object Detection : Part 1 | LearnOpenCV #
- 图像预处理_图像预处理的目的和意义_桐瑾灬的博客-CSDN博客
- 传统特征提取方法
- 一文讲解方向梯度直方图(hog)
- 图像特征工程:HOG 特征描述符的介绍
- 图像处理之基础---特征向量的 几何意义 - midu - 博客园
- [Python图像处理] 二十六.图像分类原理及基于KNN、朴素贝叶斯算法的图像分类案例丨【百变AI秀】-云社区-华为云
- 支持向量机通俗导论(理解SVM的三层境界)_v_JULY_v的博客-CSDN博客
- OpenCV中的「SVM分类器」:基本原理、函数解析和示例代码_虾米小馄饨的博客-CSDN博客
- SVM参数设置总结(参考源码ml.hpp) - 夕西行 - 博客园