ESP32 之 ESP-IDF 教学(六)——硬件I2C总线外设(I²C)
本文章 来自原创专栏《ESP32教学专栏 (基于ESP-IDF)》,讲解如何使用 ESP-IDF 构建 ESP32 程序,发布文章并会持续为已发布文章添加新内容! 每篇文章都经过了精打细磨!
↓↓↓通过下方对话框进入专栏目录页↓↓↓
CSDN 请求进入目录 _ O x
是否进入ESP32教学导航(基于ESP-IDF)?
确定
文章目录
-
- 一、I2C 简介
- 二、I2C 数据帧
- 三、在 ESP-IDF 中 使用 I2C API (仅介绍主机模式)
-
- 1、使用步骤(主机)
-
- ① 配置驱动程序`i2c_param_config()`
-
- 【1】参数配置
- 【2】源时钟配置
- ② 安装 I2C 驱动
- ③ 主机模式下的写数据【重点】
- ④ 主机模式下的读数据【重点】
- 2、代码示例(主机写数据)【基于C++】
- 3*、自定义时序(选学)
- 4*、I2C 中断(选学)
一、I2C 简介
I2C是一种通过两条双向IO线:SDA(串行数据线)和SCL(串行时钟线)进行数据通信的一种通信协议
二、I2C 数据帧
由于 ESP-IDF 对于I2C通信协议的封装较为完善,开发者写程序并不需要完全了解 I2C 通信时序,只需要理解I2C通信的数据帧即可。
![]()
| Start | Slave Address | R/W | Ack | Slave Address | Ack | Slave Address | Ack | … | Ack | Stop |
|---|---|---|---|---|---|---|---|---|---|---|
| 起始 | 从机地址 | 读/写 | 应答 | 8位数据 | 应答 | 8位数据 | 应答 | … | 应答 | 终止 |
- 起始信号
- 发送从机地址
- 发送读写标志:0为写,1为读取
- 应答位(可设置为忽略应答位)
- 发送8位数据
loop循环执行4、5。直至发送完所有数据- 终止
接下来我们将离不开I2C数据帧的格式。
三、在 ESP-IDF 中 使用 I2C API (仅介绍主机模式)
ESP-IDF 封装的 I2C API 中体现了面向对象的思想。它将 I2C 发送的数据帧当作了一个装有数据的容器。具体使用逻辑如下:
- 创建一个空的
I2C 命令对象。 - 添加各种子数据帧,例如起始信号,从机地址,读写位,数据,终止信号等。
接下来我将用例程来展示在 ESP-IDF 中 使用 I2C API。在此之前,我总结一下使用 I2C 的步骤。
1、使用步骤(主机)
注意:
步骤①和步骤②可以颠倒!
① 配置驱动程序i2c_param_config()
【1】参数配置
我们需要传递一个 i2c_config_t 结构体指针,该结构体包含了配置i2c主机模式的参数。
int i2c_master_port = 0;
i2c_config_t conf = {
// 选择工作模式,I2C_MODE_MASTER 为本文介绍的主机模式
.mode = I2C_MODE_MASTER,
// 选择SDA管脚的GPIO编号
.sda_io_num = I2C_MASTER_SDA_IO,
// 允许上拉
.sda_pullup_en = GPIO_PULLUP_ENABLE,
// 选择SCL管脚的GPIO编号
.scl_io_num = I2C_MASTER_SCL_IO,
// 允许上拉
.scl_pullup_en = GPIO_PULLUP_ENABLE,
// 选择一个合适的时钟频率(比如100,000)
.master.clk_speed = I2C_MASTER_FREQ_HZ,
/* 选择时钟源头,你可以填入I2C_SCLK_SRC_FLAG_* 来选择合适的时钟源 */
.clk_flags = 0,//此句可以注释掉
};
【2】源时钟配置
对于.clk_flags元素:
| 名称 | 值 | 含义 |
|---|---|---|
I2C_SCLK_SRC_FLAG_FOR_NOMA |
0 | 仅根据所需频率进行自动选择时钟。(不支持特殊功能,如 APB 等) |
I2C_SCLK_SRC_FLAG_AWARE_DFS |
1 | 当 APB 时钟改变时,时钟的波特率不会改变。 |
I2C_SCLK_SRC_FLAG_LIGHT_SLEEP |
2 | 用于轻度睡眠模式 |
之后调用i2c_param_config()配置 I2C:
i2c_param_config(I2C_NUM_0, &conf);
- 参数一:欲配置的I2C通道(
I2C_NUM_0或I2C_NUM_1) - 参数二:配置参数结构体的指针
② 安装 I2C 驱动
方法是调用函数 i2c_driver_install()
函数
i2c_driver_install()简介:
1、参数(手机端可能得不到完全展示,手机端可以滑动来查看右边一列)
参数名 含义 类型 "i2c_num"【I2C 端口编号】
写0或1,或者I2C_NUM_0或I2C_NUM_1)[i2c_port_t]"mode"总线工作模式
主机(I2C_MODE_MASTER)还是从机(I2C_MODE_SLAVE)[i2c_mode_t]"slv_rx_buf_len"主机模式下此参数无效,请填 0
从机接受缓冲区大小,主机不需要。[size_t]"slv_tx_buf_len"主机模式下此参数无效,请填 0
从机发送缓冲区大小,主机不需要。[size_t]"intr_alloc_flags"如要忽略中断,请填 0
中断分配标志,详见[ESP32终端分配标志宏定义][int]
例如将I2C_NUM_0驱动配置为主机模式:
i2c_driver_install(0, I2C_MODE_MASTER, 0, 0, 0);
或者
i2c_driver_install(I2C_NUM_0, I2C_MODE_MASTER, 0, 0, 0);
主机模式下,后三个参数全为0
注意:
当使用i2c_driver_install()建立 I2C 通信,一段时间后不再需要 I2C 通信时,可以通过调用i2c_driver_delete()来移除驱动程序以释放分配的资源。
③ 主机模式下的写数据【重点】
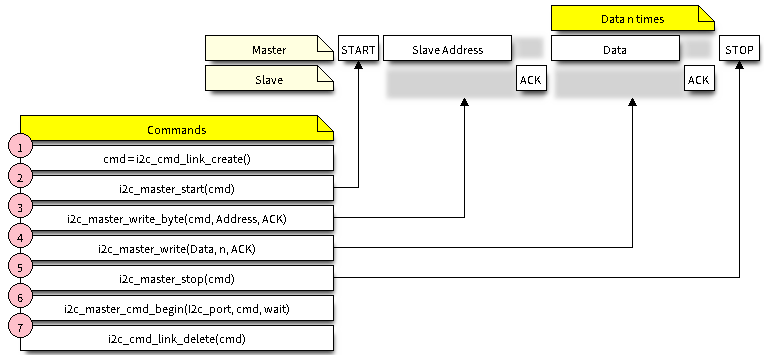
ESP-IDF 中的 I2C 通信数据帧是 i2c_cmd_handle_t 对象。你可以把它当作一个容器。之后向其中添加各种子数据帧(例如起始信号,从机地址,读写位,数据,终止信号等)
首先看一个发送数据的短代码
//创建i2c_cmd_handle_t对象
i2c_cmd_handle_t cmd = i2c_cmd_link_create();
//添加各种子数据帧
i2c_master_start(cmd); //起始信号
i2c_master_write_byte(cmd, 0x78, true); //从机地址及读写位
i2c_master_write(cmd, bytes, datalen, true); //数据位(数组)
i2c_master_stop(cmd); //终止信号
//向I2C_NUM_0 发送这个数据帧,timeout设置为1000毫秒
i2c_master_cmd_begin(0, cmd, 1000 / portTICK_PERIOD_MS);
//删除i2c_cmd_handle_t对象,释放资源
i2c_cmd_link_delete(cmd);
解析:(部分解析在 上文代码注释 中)
- 第 4 行:向
i2c_cmd_handle_t对象中添加一个起始信号
- ★第 5 行:向
i2c_cmd_handle_t对象中添加一个从机地址0x78,读写位为0
【i2c_master_write_byte()函数的作用是添加1个byte(8位)数据到cmd_link中】
- ★ 第 6 行:调用函数
i2c_master_write()添加datalen个数据位(第三个参数),数据为是bytes数组,类型为uint8_t[],长度要 ⩾ \geqslant ⩾datalen
【i2c_master_write()函数的作用是添加多个byte数据到cmd_link中,以数组形式传入,所以这里也可以替换为i2c_master_write_byte()表示只需要添加一个数据位(8位数据),参考第 5 行】
- 第 7 行:添加一个终止信号
- 第 9 行:发送数据
通过调用i2c_master_cmd_begin()来触发 I2C 控制器执行命令链接。一旦开始执行,就不能再修改命令链接。
函数
i2c_master_cmd_begin()简介:
1、返回值
ESP_OK成功ESP_ERR_INVALID_ARG参数错误ESP_FAIL发送错误,从机无应答ESP_ERR_INVALID_STATEI2C 驱动为安装或非Master模式ESP_ERR_TIMEOUT总线繁忙,发送超时(TimeOut)
2、参数(手机端可能得不到完全展示,手机端可以滑动来查看右边一列)
参数名 含义 类型 "i2c_num"【I2C 端口编号】
写0或1或者I2C_NUM_0或I2C_NUM_1)[i2c_port_t ]"cmd_handle"欲执行的 i2c_cmd_handle_t对象
(I2C command handler对象)[i2c_cmd_handle_t]"ticks_to_wait":最大等待的 ticks
例如:1000 / portTICK_PERIOD_MS)表示1000毫秒.[TickType_t]
④ 主机模式下的读数据【重点】

在读取数据时,在上图的步骤 4 中,不是用 i2c_master_write...,而是用 i2c_master_read_byte() 和/或 i2c_master_read() 填充命令链接。
这两个函数和i2c_master_write_byte()以及i2c_master_write()很类似。但是参数有所不同。
如i2c_master_read(),它的第二个参数data的含义变为用于接收数据的缓冲区地址(uint8_t数组指针即可),第三个参数datalen变为所需要接受数据的长度。第四个参数ack为主机是否发送应答信号。发送则为I2C_MASTER_ACK,若每个byte都非应答则为I2C_MASTER_NACK。若只有最后一个字节(接收到数据大于datalen之后)才非应答,则为I2C_MASTER_LAST_NACK
再如i2c_master_read_byte(),第二个参数data也变成了用于接受数据的缓冲区地址,类型为uint8_t的变量指针即可。第三个参数ack和上者一样。
其余操作和 ③ 一致。
2、代码示例(主机写数据)【基于C++】
为更好的体现 I2C API 的使用,本示例给出的并不是一个完整个ESP-IDF程序,而是一个涉及I2C初始化,主机发送数据等操作的部分程序。因此,这个代码示例程序中不包含"app_main()"入口函数。
在以下代码示例中:
i2c_init()是i2c初始化函数i2c_sendData是i2c向指定7位从机地址发送多个uint8_t数据的函数i2c_sendByte是i2c向指定7位从机地址发送一个uint8_t数据的函数
#include 3*、自定义时序(选学)
如本文 使用步骤——① 配置驱动程序所述,函数 i2c_param_config() 在初始化 I2C 端口的驱动程序配置时,也会将几个 I2C 通信参数设置为 I2C 总线协议规范 规定的默认值。 其他一些相关参数已在 I2C 控制器的寄存器中预先配置。
通过调用下表中提供的专用函数,可以将所有这些参数更改为用户自定义值。请注意,时序值是在 APB 时钟周期中定义。APB 的频率在 I2C_APB_CLK_FREQ 中指定。
| 要更改的参数 | 函数 |
|---|---|
| SCL 脉冲周期的高电平和低电平 | i2c_set_period() |
| 在产生 启动 信号期间使用的 SCL 和 SDA 信号时序 | i2c_set_start_timing() |
| 在产生 停止 信号期间使用的 SCL 和 SDA 信号时序 | i2c_set_stop_timing() |
| 从机采样以及主机切换时,SCL 和 SDA 信号之间的时序关系 | i2c_set_data_timing() |
| I2C 超时 | i2c_set_timeout() |
优先发送/接收最高有效位 (LSB) 或最低有效位 (MSB),可在 i2c_trans_mode_t 定义的模式中选择 |
i2c_set_data_mode() |
上述每个函数都有一个 _get_ 对应项来检查当前设置的值。例如,调用 i2c_get_timeout() 来检查 I2C 超时值。
要检查在驱动程序配置过程中设置的参数默认值,请参考文件 driver/i2c.c并查找带有后缀 _DEFAULT 的定义。
通过函数 i2c_set_pin() 可以为 SDA 和 SCL 信号选择不同的管脚并改变上拉配置。如果要修改已经输入的值,请使用函数 i2c_param_config()。
4*、I2C 中断(选学)
I2C 工作过程会产生多种中断,安装驱动程序时会安装默认中断处理程序。
当然,您可以通过调用函数 i2c_isr_register() 来注册自己的而不是默认的中断处理程序。无论何时,中断服务程序(ISR)都应保持简短!
在运行自己的中断处理程序时,可以参考 ESP32 技术参考手册 > I2C 控制器 (I2C) > 中断 [点击打开PDF链接],以获取有关 I2C 控制器触发的中断描述。
调用函数 i2c_isr_free() 删除中断处理程序。
