【FreeRTOS】系统移植:资料下载
❤️作者主页:凉开水白菜
❤️作者简介:共同学习,互相监督,热于分享,多加讨论,一起进步!
❤️专栏资料:https://pan.baidu.com/s/1nc1rfyLiMyw6ZhxiZ1Cumg?pwd=free
❤️点赞 收藏 ⭐再看,养成习惯
订阅的粉丝可通过PC端左侧加我微信,可对文章的内容进行一对一答疑!
文章目录
-
- 简介
- 资源下载
- 工程创建
- 移植FreeRTOS
-
- 错误1:..\FreeRTOS\port\RVDS\ARM_CM4F\port.c(483): error: A1586E: Bad operand types (UnDefOT, Constant) for operator
- 错误2:中断函数的重复定义
- 错误3:STM32F407ZG_FreeRTOS\STM32F407ZG_FreeRTOS.axf: Error: L6218E: Undefined symbol vApplicationIdleHook (referred from tasks.o).等四个函数未定义
- 初步测试
- 代码下载
- 结尾
简介
在裸机系统中,所有的程序基本都是自己写的,所有的操作都是在一个无限的大循环里面实现。现在还有一些项目开发用的都是裸机系统,而且也能够满足需求。 为什么还要学习 RTOS 编程,偏偏还要整个操作系统进来。一是项目需要,随着项目要实现的功能越来越多,单纯的裸机系统已经不能够完美地解决问题,反而会使编程变得更加复杂,如果想降低编程的难度,我们可以考虑引入RTOS 实现多任务管理,这是使用 RTOS 的最大优势。二是学习的需要,进入实时操作系统的学习对于我们后面学习Linux系统开发会有不少的帮助;
资源下载
Github下载:https://github.com/freertos
托管下载:https://sourceforge.net/projects/freertos/files/FreeRTOS/
官网下载:https://www.freertos.org/

在这里我采用FreeRTOSv9.0.0.zip这个包进行后续的开发,这也是使用人数较多的一个版本相对比较稳定,建议大家在学习的过程使用和我一样的版本,如果你的开发板和我的不同也没有关系,我们下面的工程创建将采用STM32CubeMX进行创建,理论上我们的应用代码是都可以使用的只是在创建工程时选择的芯片不同,后续的外设可能引脚会有所改变,但这不影响学习;
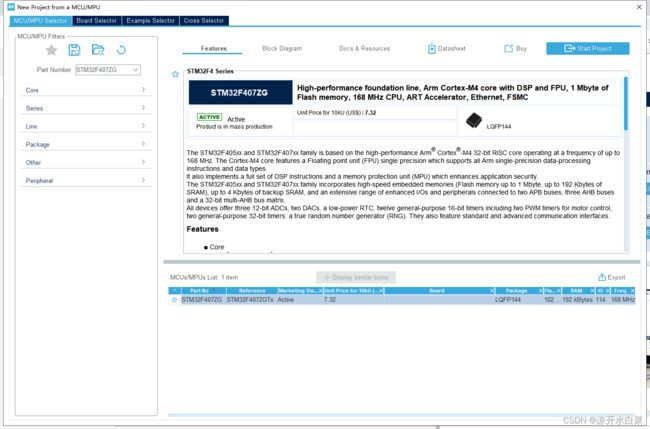
工程创建
选择自己对应的芯片
配置时钟,我这里使用的是正点原子的探索者所以高速和低速都选择外部晶振时钟,根据自己板子原理图搭配即可
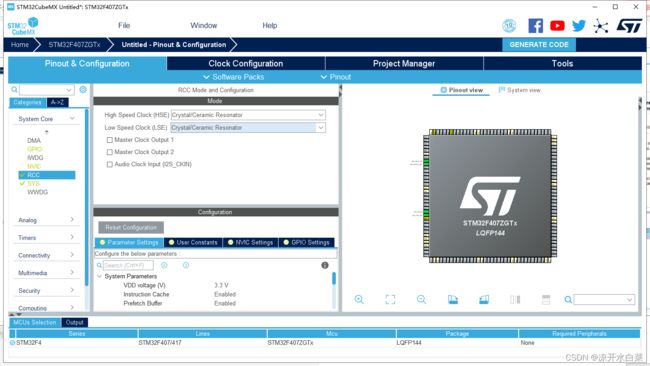
配置调试模式和配置基准时钟(原来的systick用来作为FreeRTOS的任务切换了,我们的HAL_Delay就没有基准时钟了)

配置串口1

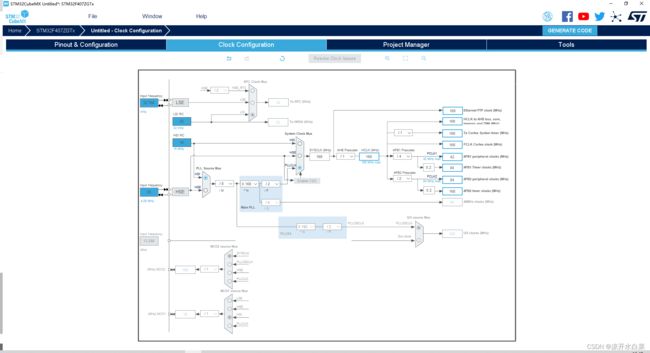
配置时钟
配置两个LED灯

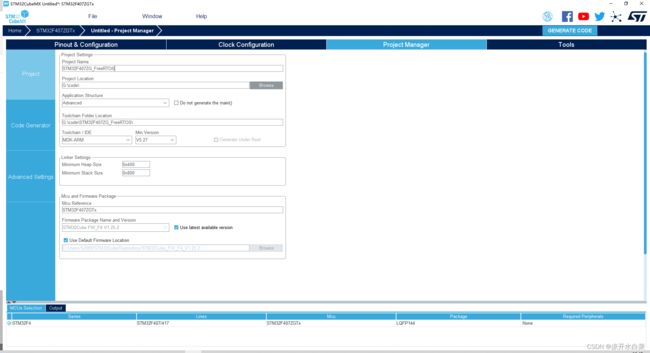
配置工程
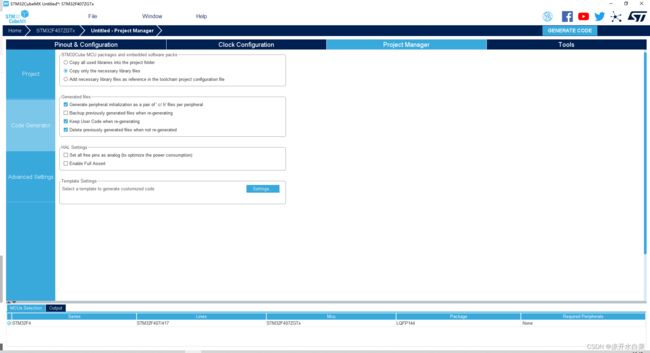
然后生成工程并测试工程

/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_GPIO_TogglePin(LED0_GPIO_Port,LED0_Pin);
HAL_Delay(200);
HAL_GPIO_TogglePin(LED1_GPIO_Port,LED1_Pin);
HAL_Delay(200);
}
/* USER CODE END 3 */
}
移植FreeRTOS
在工程目录下新建一个FreeRTOS的文件夹再在这个文件夹下面建立三个文件夹分别是include、src和port;

将FreeRTOSv9.0.0\FreeRTOS\Source文件夹下面的所有.c文件拷贝到src目录

将FreeRTOSv9.0.0\FreeRTOS\Source\include下面所有文件拷贝到include目录

将FreeRTOSv9.0.0\FreeRTOS\Source\portable目录下的MemMang文件夹和RVDS文件夹拷贝到port目录

将FreeRTOSv9.0.0\FreeRTOS\Demo\CORTEX_M4F_STM32F407ZG-SK\FreeRTOSConfig.h文件复制到工程的core/Inc目录中,这个文件是该实时操作系统的配置文件,这就有点像Linux的.config配置文件一样对应的芯片又对应的配置文件,在这个demo里面涵盖了大部分的芯片支持,如果没有的话选择自己芯片的架构随意复制一个然后进行更改配置即可;

其实在stm32CUBEMX中我们可以直接添加FreeRTOS的包,而且建立工程更加方便,但是自动生成的工程很难让我们了解这个工程的组成这里只是走一遍流程,后续如果在项目中使用到FreeRTOS可以选择利于自己开发的方式创建即可;
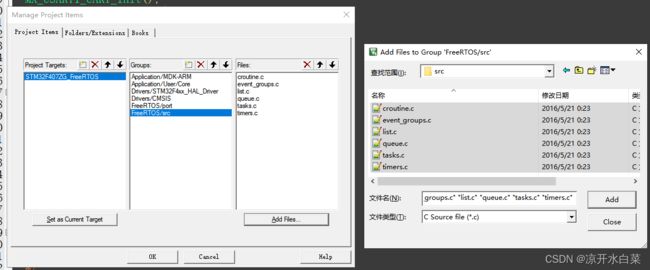
然后我们打开keil添加我们的freertos源码文件进来

新建FreeRTOS/port和FreeRTOS/src组,添加文件需要注意我们的配置文件时.h文件所以要选择All files否则找不到

FreeRTOS/src目录全部添加进来
FreeRTOS/port 用于存放 port\MemMang 文件夹 与 port\RVDS\ARM_CM?文件夹的内容,“?”表示 3、4 或者 7,具体选择哪个得看你 使用的是哪个型号的 STM32 开发板,如果是F4系列就拷贝port\RVDS\ARM_CM4F,然后我们将工程文件中 FreeRTOS 的内容添加到工程中去,按照已经新建的分组添加 我们的 FreeRTOS 工程源码。 在 FreeRTOS/port 分组中添加 MemMang 文件夹中的文件只需选择其中一个即可,我 们选择“heap_4.c”,这是 FreeRTOS 的一个内存管理源码文件。
heap_1.c:适合一些不会删除任务,队列以及信号量的任务,特别是一些比较简单的系统和一些对安全性要求比较高的系统。事实上,很多系统中只要创建了任务之后就会一直执行,不会删除任务。所以这个文件适用环境还是比较多的。
heap_2.c:能分配,能回收,但是回收时不考虑内存碎片的场所。适合一些申请和释放操作不是特别频繁,而且不会申请大数组的场所。(申请和释放会造成内存碎片,过多操作内存中可能没有大的连续区域)
heap_3.c:这种方法实际使用的还是c语言的malloc和free函数。与平台没有太大关系。
heap_4.c:内存分配和释放操作比较频繁的系统。例如要重复创建删除任务,队列,信号量等。
heap_5.c:系统需要管理不连续的内存空间,例如接入外部ram的场合

包含文件路径

添加头文件包含
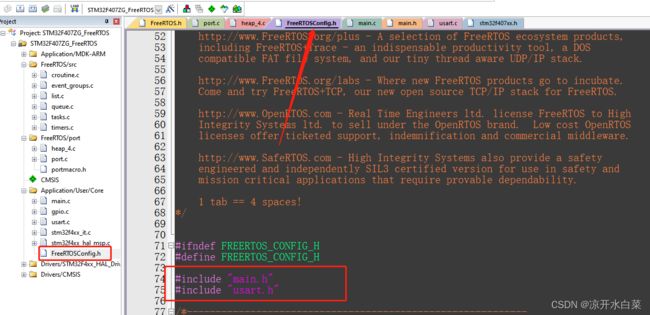
配置串口重定向

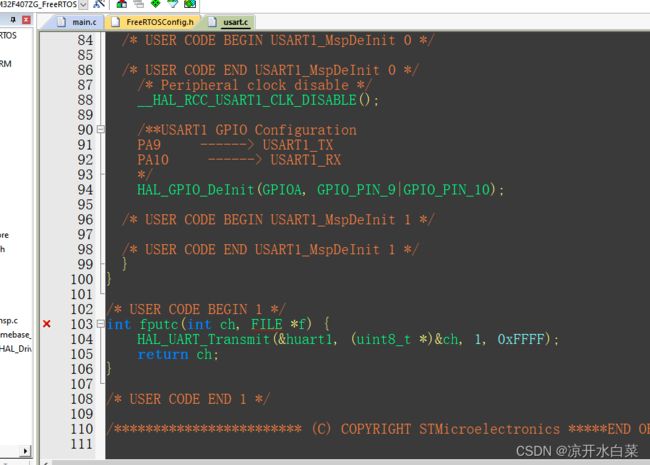
#include 然后我们开始编译:
错误1:…\FreeRTOS\port\RVDS\ARM_CM4F\port.c(483): error: A1586E: Bad operand types (UnDefOT, Constant) for operator
解决办法:全局搜索__NVIC_PRIO_BITS将4U改成4

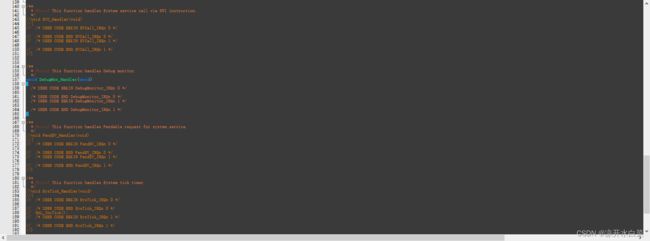
错误2:中断函数的重复定义
![]()
因为FreeRTOS已经帮我们实现了这几个函数所以我们需要在stm32f4xx_it.h文件中将这三个中断函数注释掉即可;
错误3:STM32F407ZG_FreeRTOS\STM32F407ZG_FreeRTOS.axf: Error: L6218E: Undefined symbol vApplicationIdleHook (referred from tasks.o).等四个函数未定义

解决办法就是先不实现这几个钩子函数让他等于空

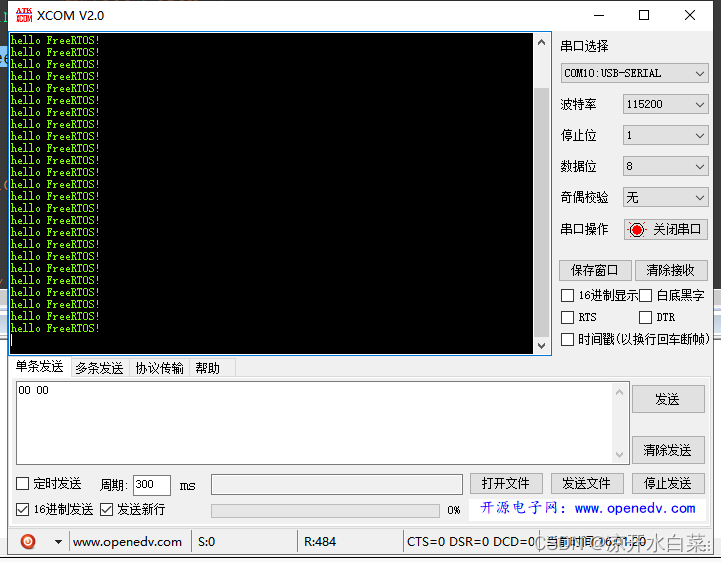
再次编译就成功了,到这里工程移植就完成了,下面进行简单的测试
初步测试
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* © Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "FreeRTOS.h"
#include "task.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
static TaskHandle_t led_task_handle = NULL;
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
static void led_task(void *par)
{
while(1)
{
HAL_GPIO_TogglePin(LED0_GPIO_Port,LED0_Pin);
vTaskDelay(500); /* 延时500个tick */
HAL_GPIO_TogglePin(LED1_GPIO_Port,LED1_Pin);
vTaskDelay(500); /* 延时500个tick */
printf("hello FreeRTOS!\r\n");
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
/* 创建app_task1任务 */
xTaskCreate((TaskFunction_t )led_task, /* 任务入口函数 */
(const char* )"led_task", /* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )4, /* 任务的优先级 */
(TaskHandle_t* )&led_task_handle); /* 任务控制块指针 */
/* 开启任务调度 */
vTaskStartScheduler();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 8;
RCC_OscInitStruct.PLL.PLLN = 168;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
成功执行,这里需要注意一下头文件的包含,我放在mian.h中包含他就会报错,而且FreeRTOS.h必须在task.h之前包含;
#include "FreeRTOS.h"
#include "task.h"
代码下载
后面的资源都会在这个连接更新
链接:https://pan.baidu.com/s/1nc1rfyLiMyw6ZhxiZ1Cumg?pwd=free
提取码:free
结尾
我是凉开水白菜,我们下文见~