泊车功能专题介绍 ———— AVP系统技术要求之人机交互&云平台
文章目录
- 人机交互
-
- 车端人机交互
-
- 车外人机交互
-
- 灯光交互
- 声音交互
- 车内人机交互
-
- 信号装置标示的交互
- 声音交互
- 场景
-
- 左右转弯
- 经过让行提示
- 泊入泊出
- 激活及退出条件
-
- 激活条件
- 退出条件
- 场端人机交互
-
- V2X交互
-
- 故障车提醒
- 路口盲区预警
- 弱势交通参与者提醒
- 场端设施的预警
-
- 车辆入场
- 车辆故障
- APP人机交互
-
- APP功能的要求
- APP端UI的要求
- 云平台要求
-
- 车位分配
- 全局路径分配
- 地图管理
- 实时监控
- 远程遥控
- 紧急停车
- 信息提醒
人机交互
人机交互(HMI):人机接口是指人与计算机之间建立联系、交换信息的输入/输出设备的接口。它与人机交互设备一起完成两个任务:
1. 信息形式的转换
2. 信息传输的控制。
车端人机交互
车外人机交互
灯光交互
基于灯光的AVP交互可采用传统车辆灯光或者基于可投射的像素大灯及其他投射装置。灯光颜色分为三类:
1. 正常点亮:AVP 车辆功能正常可开启,蓝绿色;
2. 可恢复故障:遇到GPS 信号弱或通讯临时中断等可自动恢复的故障,黄色;
3. 不可恢复故障:遇到硬件故障或网络中断且不可自动恢复的故障,红色。
白天场景的灯具发光强度应满足如最低要求(cd)

夜间场景等灯具发光强度应满足如图最低要求(cd)。

灯具安装位置要求及激活条件:
| 灯具安装位置要求及激活条件 | |||||
|---|---|---|---|---|---|
| 名称 | 序号 | 可见状态 | 安装位置 | 安装要求 | 车灯激活方式 |
| AVP指示灯 | 1 | 360°可见 | 朝向前方,面向前方,包含玻璃,从前面看,指示灯光中心在垂直中心线上或360°可见 | 车灯中心相对地面高度大于38cm。 灯光可以安装在车辆的内部或外部,如果安装在车内,则车辆应该具有减少灯光反射的玻璃。 |
点亮状态稳定。只有在AVP功能被激活状态或者远程驾驶模式激活状态AVP指示灯才点亮 |
| 或 | |||||
| 2 | 360°可见 | 朝向前方,面向前方,包含玻璃,从前面看,指示灯光中心相较垂直中心线对称或360°可 见。 | |||
| 传统车辆灯具 | 1 | 360°可见 | 基于原车指示灯位置360°可见 | 基于原车指示灯安装要求 | |
声音交互
交互声音应满足以下条件:
1. 声音大小:固定音量,音量为60dB±5dB;
2. 提示方式:滴答声、蜂鸣声、人声播报;
3. 提示频率:1Hz
车内人机交互
信号装置标示的交互

声音交互
在AVP功能可以被激活的状态或者远程驾驶模式可以被激活的状态下进行语音播报。声音交互音量为40±5dB。提示类型可分为人声语音播报、滴答声等。
场景
左右转弯
1. AVP 指示灯点亮,通过传统转向灯进行提醒;
2. AVP 指示灯点亮,车辆前照灯或投影装置投影相应字段到预先到达的地面位置,提醒用户车
辆转弯(可选);
3. 用滴答声、蜂鸣声或人声语音进行提示;
4. 基于V2X 的提示。
经过让行提示
1. AVP 指示灯正常点亮,车辆减速且车辆前方灯光闪烁提醒路人、车辆先行;
2. 车辆前照灯或投影装置投影相应字段到地面位置提醒路人、车辆先行(可选);
3. 车辆装配相关显示屏显示文字或其他先行标志提醒行人、车辆先行(可选);
4. 车辆减速或让行,用声音进行提醒过往车辆和行人先行;基于V2X 的车辆让行提示。
泊入泊出
1. 倒车入库应用倒车灯点亮;
2. 投影倒车标识提醒(可选);
3. 倒车入库应用后方扩音器进行声音提醒;
4. 出库应用前方扩音器进行声音提醒;
5. 出库AVP 指示灯正常点亮,转向灯闪烁进行提醒;
6. 投影箭头方式提醒(可选)。
激活及退出条件
激活条件
1. 当车辆处于AVP 功能开启状态;
2. 车辆行驶路径一定范围内有行人、车辆及其他障碍物的出现并影响(有可能)车辆AVP 功能
正常进行。
退出条件
1. 车辆前方有不可移动障碍物阻挡AVP 车辆正常行驶;
2. AVP 车辆行驶过程中发生系统故障;
3. 硬件设备受损或赃污。
场端人机交互
V2X交互
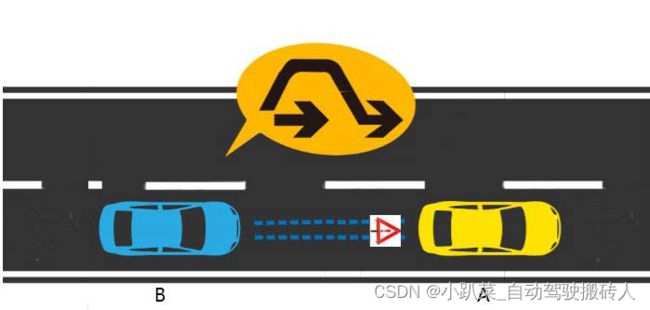
故障车提醒
基于V2X交互的故障车辆提醒如图所示:
1. AVP 车辆为故障车辆A 时,车辆持续对外广播故障车辆消息,当另一台车B 靠近时接收此消息,并换道绕行;
2. AVP 车辆为正常行驶车辆B 时,接受前方故障车辆A 广播的故障信息,做出局部路径规划,换道绕行。
路口盲区预警
基于V2X交互的路口盲区预警如图所示:
1. AVP 车辆为左转车辆A 时,接收直行车辆B 的连续广播消息并发送自车消息,减速让行顺序通过路口;
2. AVP 车辆为直行车辆B 时,发送自车消息并接收左转车辆A 的连续广播信息,减速通过路口。

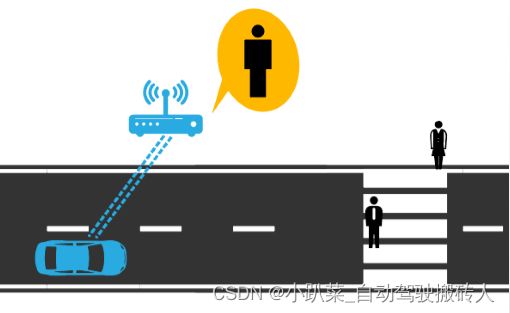
弱势交通参与者提醒
基于V2X交互的弱势交通参与者提醒如图所示,AVP车辆经过人行横道线电梯口或其他经常有行人经过的地方时,路段配备的RSU持续对外广播通过行人状态消息,车辆在驶近路口时接收此消息减速让行。
场端设施的预警
车辆入场
AVP车辆进入停车场前,有场端传感器感知并把信息传送至停车场内预警装置,提示停车场内非无人驾驶车辆减速慢行,注意避让。
车辆故障
可恢复故障:功能降级,无人驾驶模式黄色灯光点亮,其他灯光与人工驾驶灯光相同。
不可恢复故障:无人驾驶模式红色灯光点亮,其他灯光与人工驾驶灯光相同。通过V2X发送车辆故障预警给周边行驶车辆,上报停车场管理方并发送消息至车主终端。
APP人机交互
APP功能的要求
基本功能要求:
1. 泊车/取车;
2. 泊车完成确认;
3. 泊车失败故障反馈;
4. 取车完成确认;
5. 取车失败故障反馈;
6. 费用支付;
7. 显示目标停车场可用停车位信息显示(可选);
8. 停车位、停车时间段预约(可选);
9. 选定停车位确认(可选);
10. 显示泊车路径、车辆实时位置(可选);
11. 取车时间、取车地点预约(可选);
12. 取车车辆实时行驶轨迹及车辆预计到达时间(可选);
13. 历史查询(可选)。
APP端UI的要求
整体界面简洁,泊车、取车按钮操控渐变、便于区分,避免用户误操作,用户误操作后无人驾驶系统应根据前一次状态及定位信息等进行判定。基本功能要求:
1. 泊车/取车显示按键;
2. 泊车完成确认按键;
3. 泊车失败故障反馈提示框;
4. 取车完成确认按键;
5. 取车失败故障反馈提示框;
6. 费用支付弹出框;
7. 显示目标停车场可用停车位信息显示(可选);
8. 停车位、停车时间段预约成功确认按键(可选);
9. 选定停车位确认按键(可选);
10. 显示泊车路径、车辆实时位置(可选);
11. 取车时间、取车地点预约框(可选);
12. 取车车辆实时行驶轨迹及车辆预计到达时间(可选);
13. 历史查询(可选)。
云平台要求
车位分配
在AVP车辆开始行驶之前,云平台根据系统的车位占用情况为AVP车辆分配一个正确的空闲的目标车位,如果目标车位在AVP车辆行驶过程中因被占用等特殊情况变为不可用车位,则重新分配另一个可用车位。
全局路径分配
云平台为AVP车辆分配好目标车位后,根据现场的实际交通情况生成一条最优的到达目标车位的全局路径,规划的全局路径应尽量降低AVP车辆与场内其他交通参与者发生冲突,路径文件生成后通过网络传输下载到车载终端。
地图管理
车辆到达AVP自主泊车停车场指定起始区域后,向云平台发送地图文件下载请求,云平台通过网络传输将最新的地图文件下载到车载终端。
实时监控
云平台根据停车场内场端设施和AVP车辆上报的信息对停车场内交通状态进行实时监控,根据AVP车辆的实时运行状态和环境交通状态,为停车场运维人员提供运维预警通知。
远程遥控
AVP车辆自主泊车过程中,外部因素导致无法自主泊车时,用户可通过远程遥控(视频查看/指令下发)控制车辆行驶和完成泊车操作。
紧急停车
AVP车辆在向目标车辆行驶或自主泊车过程中,云平台或停车场运维人员通过实时监控停车场交通状况判断出车辆有碰撞风险或其他紧急异常情况时,可向车辆下发紧急停车指令,车辆紧急制动。
信息提醒
当停车场受光线、气候或其他外部环境原因影响不适宜继续运行AVP车辆时,云平台应及时向用户进行反馈或提醒。