Pure-Pursuit 跟踪五次多项式轨迹
Pure-Pursuit 跟踪五次多项式轨迹
考虑双移线轨迹 X 轴方向位移较大,机械楼停车场长度无法满足 100 ~ 120 m,因此采用五次多项式进行轨迹规划,在轨迹跟踪部分也能水一些内容
调整 double_lane.cpp 为 ref_lane.cpp,结合 FrenetPath 类将参考路径的构造抽离为单独的函数
#include 跟踪过程如下
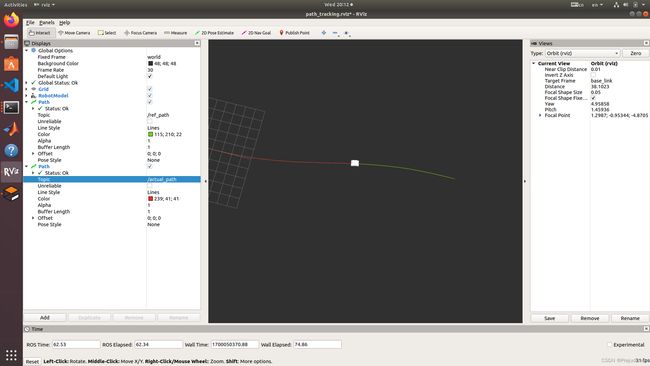
跟踪效果如下



这里只分析出横向跟踪误差,因为 y 与 x 的关系可以直接获得,yaw 与 x 的关系没有直接的表达式
y = 0.00000000 + 0.00000000 * x + 0.00000000 * x^2 + 0.00192000 * x^3 + -0.00011520 * x^4 + 0.00000184 * x^5
需要完善对于五次多项式的学习