周报5_YMK
周报5
论文:FLASHDECODING++: FASTER LARGE LANGUAGE MODEL INFERENCE ON GPUS
https://arxiv.org/pdf/2311.01282.pdf
在斯坦福大学团队的 Tri Dao 等人提出了 FlashAttention 和 FlashDecoding 后,相关的工作又被很快提出,上周来自无问芯穹(Infinigence-AI)、清华大学和上海交通大学的联合团队提出了一种新方法 FlashDecoding++,因为该工作并不是出自FlashAttention 和 FlashDecoding的团队,所以也被叫做野生的 FlashDecoding
Asynchronized Softmax with Unified Maximum Value
回顾上周讲的 FlashDecoding,在 FlashAttention 的基础上引入了新的并行维度:keys/values的序列长度,然而,在每一个块的内部,计算过程还是同步的(主要是局部最大值)。本文发现这种同步操作的开销约为20%。因此,作者希望去除同步操作,也就是独立计算出partial softmax结果。
Softmax的演变:
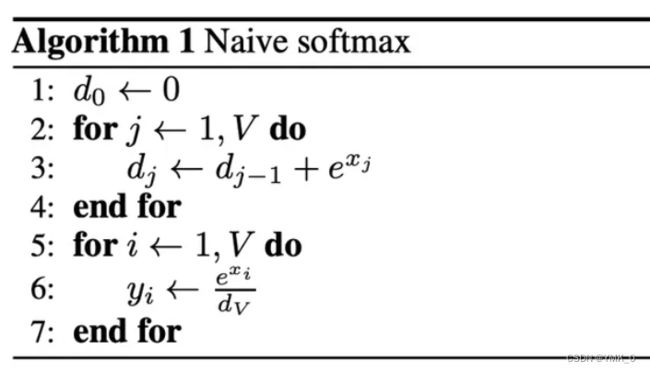
navie softmax
y i = e x i ∑ i V e x i y_i=\frac{e^{x_i}}{\sum^V_{i}{e^{x_i}}} yi=∑iVexiexi
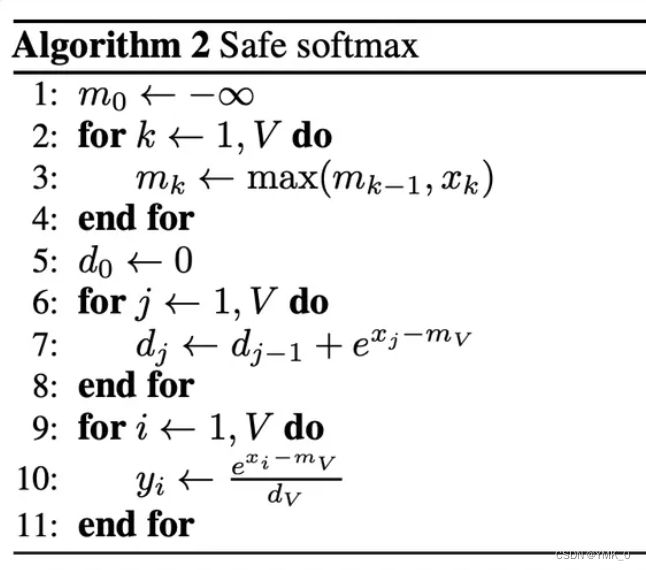
safe softmax
由于在实际的计算中,指数计算exp存在不稳定性,比如数值容易溢出,超过一定范围计算精度会下降等问题。因此在实际使用中,往往用safe softmax更好,safe softmax的计算是在navie softmax的基础之上将数组x[1…n]每个元素减去数组的最大值max之后,再做softmax
y i = e x i − m a x k = 1 V x k ∑ j = 1 V e x j − m a x k = 1 V x k y_i=\frac{e^{x_i-max_{k=1}^Vx_k}}{\sum_{j=1}^Ve^{x_j-max_{k=1}^Vx_k}} yi=∑j=1Vexj−maxk=1Vxkexi−maxk=1Vxk
online softmax
是在safe softmax的基础上做的改进
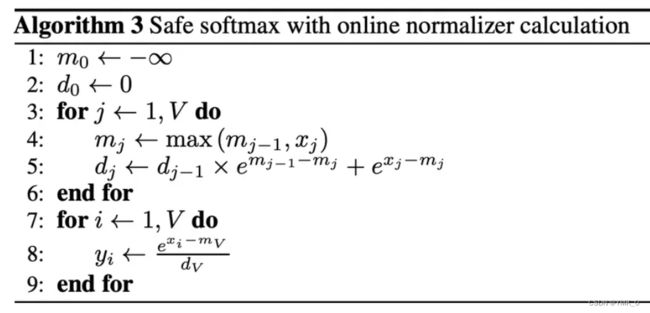
其中 d j − 1 d_{j-1} dj−1表示数组x[1…n]的前j-1个指数和,它的指数和是基于前j-1个元素的最大值 m j − 1 m_{j-1} mj−1来算的的,注意哦, m j − 1 m_{j-1} mj−1并不是全局的最大值,同理 m j m_{j} mj表示前j个元素的最大值,那么它跟 m j − 1 m_{j-1} mj−1的区别在于,它有可能等于 m j − 1 m_{j-1} mj−1,也有可能是最新进了的第j个元素 x j x_{j} xj.
能看出分块softmax在求的时候依赖于上一个块的max,为了在块的内部也做到并行,作者提出的方法很简单:就是找到一个合适的公共最大值 ϕ \phi ϕ。然而,如果 ϕ \phi ϕ太大,会造成 e x i − ϕ e^{{x_i}−ϕ} exi−ϕ溢出;如果 ϕ ϕ ϕ太小,会造成 e x i − ϕ e^{{x_i}−ϕ} exi−ϕ精度损失。于是作者进行了统计,如下图所示。例如,对于Llama2-7B, >超过99.99%的值在[-16.8, 6.5]之间。
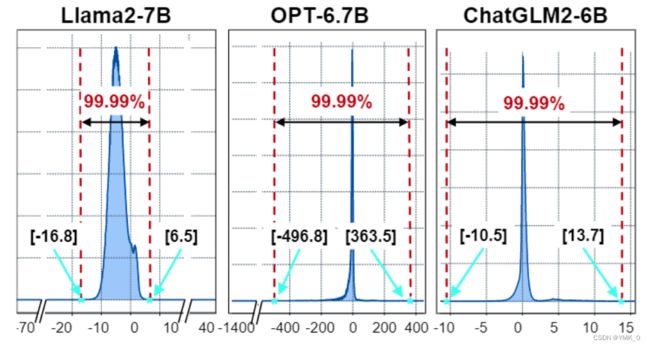
但是对于OPT-6.7B来说,其范围较大,于是作者采用动态调整策略,如果在推理过程中发现设置的 ϕ \phi ϕ不合理,那么就终止当前操作,然后采用FlashAttention和FlashDecoding的方法计算softmax。不过怎科学拍出 ϕ \phi ϕ 这个数,作者也没给出具体方法。
但是也有人对这个工作表示质疑,一个是 ϕ \phi ϕ 的选择是很困难的,极易造成精度的下降,另一个是该优化未必能带来实际的加速。
因为FlashDecoding中:
-
thread block层次并行度是:sequence_len/block_size
-
block内thread的并行粒度是:Tile Size,且block_size>Tile Size
在FlashDecoding++中:
-
thread block层次并行度是:sequence_len/Tile Size
-
block内thread的并行粒度仍然是:Tile Size
这样不一定对Occupancy(GPU 上同时活跃的线程数量与线程块容量的比率)提升有确定性帮助,如果FlashDecoding的thread block切分比较好把SM沾满,SM内部即使串行计算不同Tile并不一定有什么问题。
Flat GEMM Optimization with Double Buffering
Decoding阶段的过程主要由GEMV(batch size=1)或flat GEMM(batch size>1)。GEMV/GEMM运算可以用M、N、K来表示,其中两个相乘矩阵的大小分别为M × K和K × N。
一般LLM推理引擎利用Tensor Core使用cuBLAS和CUTLASS等库来加速。Tensor Core 在处理矩阵乘法(GEMM)操作时,通常对 M 和 N 的维度有一些优化。当 M 和 N 维度是 8 的倍数时,可以充分发挥其优势。
但是,在解码阶段,可能会执行矩阵向量乘法(GEMV)或扁平化矩阵乘法(Flat GEMM)等操作。在这些特定的操作中,M 的维度可能相对较小,远远小于 64。
由于 Tensor Core 的优化通常期望 M 和 N 的维度是 8 的倍数,所以在解码阶段,如果 M 维度较小,填充零以满足 Tensor Core 期望的维度可能导致计算利用率下降。这是因为填充的零可能占用了矩阵中的大部分空间,而这些零对实际计算没有贡献,从而浪费了计算资源。
若假设N维度上和K维度上的tiling size分别为 B N B_N BN和 B K B_K BK,那么每个GEMM tile的计算量为 2 × M × B N × B K 2×M×B_N×B_K 2×M×BN×BK(这里的2表示乘加2次),总共有 B = N × K B N × B K B=\frac{N×K}{B_N×B_K} B=BN×BKN×K个GEMM tiles。总内存访问量为 ( M × B K + B N × B K ) × B + M × N (M×B_K+B_N×B_K)×B+M×N (M×BK+BN×BK)×B+M×N。因此,计算和内存比为:

另一方面,tiling后的并行度是 N / B N N/B_N N/BN。
**于是作者发现了:计算和内存比与 B N B_N BN正相关,而并行度与 B N B_N BN负相关。**下图展示了GEMM在不同 B N B_N BN和N下的性能(归一化后)。本文总结了两个关键结论:
- 当 N N N较小时,flat GEMM是parallelism-bounded。NVIDIA Tesla A100中有108个Streaming Multiprocessors (SMs),于是应该将 N / B N N/B_N N/BN设置为一个相关的数(128或256)。
- 当 N N N 较大时,flat GEMM是memory-bounded。通过隐藏memory access latency可以提高性能。

为了隐藏memory access latency,本文引入了double buffering技术。具体来说就是在共享内存中分配两个buffer,一个buffer用于执行当前tile的GEMM计算,同时另一个buffer则加载下一个tile GEMM所需的数据。这样计算和内存访问是重叠的,本文在N较大时采取这种策略。
总结:没有FlashAttention和FlashDecoding惊艳,个人觉得FlashDecoding的同步处理代价不大,而且本文中动态调整softmax方法也引入了判断、终止和分支跳转等操作。
ention和FlashDecoding惊艳,个人觉得FlashDecoding的同步处理代价不大,而且本文中动态调整softmax方法也引入了判断、终止和分支跳转等操作。
另外,目前正在看文章 CosmoFlow: Using Deep Learning to Learn the Universe at Scale