基于web server实现工业数据采集
目录
1、引言
2、相关研究
2、1 Modbus
2、2 Modbus三类衍生
2、3 Modbus总结
2、3、1 使用总结
2、3、2 协议总结
3、系统设计
3、1 架构框图
3、2 流程讲解
4、代码分析
4、1 主机采集数据
4、2 主机写线圈
4、3 Webserver服务器响应网页采集数据
4、4 Webserver服务器响应网页操作MCU
4、5 网页配置
5、实验结果
6、结论
1、引言
在工业自动化领域,数据采集是非常重要的一环。通过对工业设备的数据采集、存储和显示,可以实现对生产过程的监控和优化,提高生产效率和质量。而Modbus作为一种通信协议,在工业控制系统中被广泛应用于数据传输。因此,基于Modbus的工业数据采集系统成为了一种常见的解决方案。
2、相关研究
2、1 Modbus
Modbus协议定义了设备之间的通信规范,包括数据帧格式、数据类型、寻址方式等。它主要包含以下几个关键概念:
-
主从结构:Modbus通信中存在主设备(Master)和从设备(Slave)两种角色。主设备负责发起通信请求和控制操作,而从设备则响应主设备的请求并执行相应的操作。(支持单主多从,多主多从需要总线仲裁的支持)
-
数据帧格式:Modbus协议使用二进制编码,将数据封装为称为数据帧(Frame)的通信单元。数据帧包括地址域、功能码、数据域和错误检测等字段。地址域用于标识从设备的地址,功能码表示主设备请求的操作类型,数据域存储具体的数据信息,错误检测字段用于确保数据的完整性和准确性。(ModbusRTU就是此类帧格式)
-
功能码:Modbus协议定义了一系列功能码,用于标识主设备请求的操作类型。常见的功能码包括读取数据、写入数据、读取设备状态等。不同的功能码对应不同的数据读写方式和操作。
-
寻址方式:Modbus协议支持不同的寻址方式,包括基于从设备地址的寻址(1到247)和基于扩展地址的寻址(1到65535)。主设备通过指定不同的地址来与特定的从设备进行通信。
详见: 面试通信协议
2、2 Modbus三类衍生
-
Modbus TCP: Modbus TCP是基于TCP/IP协议的一种Modbus传输方式。它通过以太网进行数据传输,使用标准的Modbus协议格式,将Modbus数据封装在TCP/IP报文中进行传输。Modbus TCP支持较高的通信速度和较大的数据量,并且可以通过网络连接实现分布式控制和监控。
-
Modbus ASCII: Modbus ASCII是一种基于字符的Modbus传输方式。它使用ASCII码表示数据,并通过串口进行传输。在Modbus ASCII中,每个字节都用两个ASCII字符表示,因此传输速率较慢。Modbus ASCII具有较好的可读性,但对于大量数据的传输效率较低。
-
Modbus RTU: Modbus RTU是一种基于二进制的Modbus传输方式。它使用二进制编码表示数据,并通过串口进行传输。Modbus RTU相比Modbus ASCII具有更高的传输速率和更高的传输效率,因为它直接传输二进制数据,不需要进行ASCII码的转换。Modbus RTU通常用于在串口通信环境下进行短距离的数据传输。
2、3 Modbus总结
2、3、1 使用总结
- Modbus TCP适用于高速、远程通信的以太网环境,支持多主多从通信。
- Modbus ASCII适用于低速、短距离的串行通信环境,易于调试和诊断。
- Modbus RTU适用于中等速度和距离的串行通信环境,具有高效率、实时性和可靠性。
2、3、2 协议总结
-
简单易用:Modbus协议采用简单的数据帧格式和功能码定义,易于理解和实现。它不仅适用于大型工业控制系统,也可以用于小型设备和嵌入式系统。
-
可靠性:Modbus协议具有良好的可靠性和容错性。它使用校验和机制来确保数据传输的准确性,同时支持错误检测和重发机制。
-
灵活性:Modbus协议支持多种物理层和传输方式,包括串口(如RS-232、RS-485)、以太网等,以适应不同的通信环境和需求。
3、系统设计
3、1 架构框图
 图3-1 整体架构框图
图3-1 整体架构框图
3、2 流程讲解
1、手动输入配置Modbus从机的设置,数据等。
2、Modbus主机采用多线程技术,实现读写分离。Modbus主机每秒采集数据一次,然后使用共享内存这种IPC实现采集数据与web server服务器共享数据。
3、网页可以点击或者发送GET或者POST请求,请求Web server 服务器响应对应的操作,倘若网页想关闭一盏灯,也就是说想操作从机的线圈,那么需要先通过http协议发送请求,Webserver接收到数据之后,进行相应判断处理,通过消息队列发送数据请求给Modbus主机,主机接收到数据之后,通过ModbusTCP通信协议格式操作从机线圈,即可实现通过网页控制灯灭。
4、代码分析
4、1 主机采集数据
void *handler_read(void *arg)//主机读取从机的数据(线程处理函数)
{
modbus_t *ctx = (modbus_t *)arg; //创建实例
int addr, nb, len;
addr = 0;
nb = 4;
uint16_t *p=NULL;
while (1)
{
p=share_mem();//调用共享内存函数
if ((len = modbus_read_registers(ctx, addr, nb, p)) < 0)//采集从机的数据,将其共享到共享内存
{
perror("modbus read err\n");
modbus_close(ctx);
modbus_free(ctx);
return NULL;
}
sleep(1);
}
}4、2 主机写线圈
void *handler_write(void *arg)//线程处理函数
{
modbus_t *ctx = (modbus_t *)arg;//创建实例
struct msg buf;
int len=sizeof(buf)-sizeof(long);
int msgid=msg_init();
while (1)
{
msgrcv(msgid, &buf, len, 1, 0);//接收Webserver服务器发送的数据
if (buf.data[12] == '0')//判断数据格式,进行不同的处理
{
if (modbus_write_bit(ctx, 0, buf.data[14]-48) < 0)//0 0 代表灯灭 0 1 代表灯亮
{
perror("write err\n");
modbus_close(ctx);
modbus_free(ctx);
return NULL;
}
}
else
{
if (modbus_write_bit(ctx, 1, buf.data[14]-48) < 0)//1 0 代表蜂鸣器不响 1 1 代表蜂鸣器响
{
perror("write err\n");
modbus_close(ctx);
modbus_free(ctx);
return NULL;
}
}
}
}4、3 Webserver服务器响应网页采集数据
static int handler_read(int sock, const char *input)//读取数据函数
{
u_int16_t *p=NULL;
p=share_mem();//获取共享内存
char reply_buf[HTML_SIZE] = {0};
sprintf(reply_buf,"light = %d x/y/z=%d/%d/%d",p[0],p[1],p[2],p[3]);//写入数据到数组
printf("resp = %s\n", reply_buf);
send(sock,reply_buf,strlen(reply_buf),0);//回复数据给网页
return 0;
}4、4 Webserver服务器响应网页操作MCU
static int handle_write(int sock,const char *input)//发送;改变设备状态函数
{
struct msg buf;
int len=sizeof(buf)-sizeof(long);
int msgid=msg_init();
buf.type=1;//定义消息类型
strcpy(buf.data,input);//拷贝数据
msgsnd(msgid, &buf, len, 0);//发送数据给Modbus主机
printf("send buf = %s\n",buf.data);
return 0;
}4、5 网页配置
基于Modbus模拟工业数据采集
光线:
x 轴:
y 轴:
z 轴:
led:
fan:
5、实验结果
 图5-1 网页界面
图5-1 网页界面
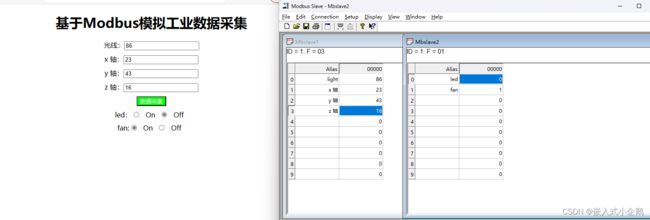 图5-2 数据采集与设备控制图
图5-2 数据采集与设备控制图
6、结论
基于Web服务器的工业数据采集系统为工业用户提供了一种灵活、高效的解决方案,使他们能够实时监测设备状态、收集并分析生产数据。
-
实时监测:基于Web服务器的工业数据采集系统能够实时监测设备状态和生产数据。通过采集节点与传感器或PLC等设备的连接,系统可以及时获取各种类型的数据,如温度、湿度等,以及设备的开关状态等。
-
数据采集与存储:系统通过合适的通信协议与数据采集设备进行通信,并将采集到的数据传输到Web服务器。
-
数据处理与分析:系统通过编写数据处理和分析程序,对采集到的数据进行实时计算和智能分析,进行相应的处理操作。
-
可视化展示与报表生成:通过Web服务器提供的前端界面,系统将数据以可视化的方式展示给用户,提供简单直观的操作与观赏方式。
感谢阅读,希望对你有所帮助。
