残差网络ResNet
paper:https://arxiv.org/abs/1512.03385
当更深层次的网络能够开始收敛时,就会暴露出一个退化问题:随着网络深度的增加,精度会饱和(这可能并不奇怪),然后迅速退化。
残差网络结构的提出,就是解决了随着网络层数的加深,出现的梯度弥散、梯度爆炸、以及网络退化的现象。

架构:
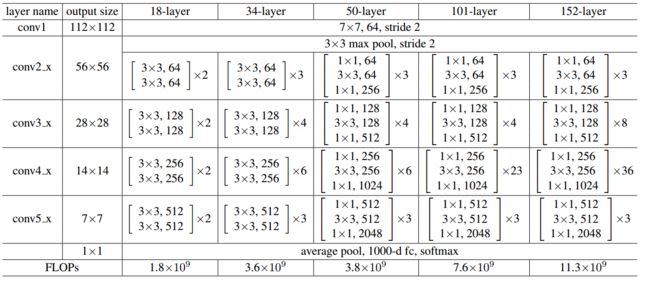
resnet系列如下表
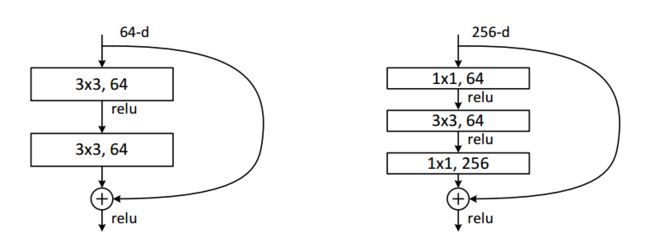
残差模块。左图:ResNet34的残差块(在56×56特征图上),右图:ResNet-50/101/152的“bottleneck”残差块。
ImageNet的示例网络架构。左图:VGG-19模型(196亿FLOP)作为参考。中间:具有34个参数层(36亿FLOP)的平面网络。右图:具有34个参数层(36亿FLOP)的残差网络。虚线快捷方式会增加维度。

Code
(1)ResNet18
class ResidualBlock(nn.Module):
def __init__(self, inchannel, outchannel, stride=1):
super(ResidualBlock, self).__init__()
self.left = nn.Sequential(
nn.Conv2d(inchannel, outchannel, kernel_size=3, stride=stride, padding=1, bias=False),
nn.BatchNorm2d(outchannel),
nn.ReLU(inplace=True),
nn.Conv2d(outchannel, outchannel, kernel_size=3, stride=1, padding=1, bias=False),
nn.BatchNorm2d(outchannel)
)
self.shortcut = nn.Sequential()
if stride != 1 or inchannel != outchannel:
self.shortcut = nn.Sequential(
nn.Conv2d(inchannel, outchannel, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(outchannel)
)
def forward(self, x):
out = self.left(x)
out = out + self.shortcut(x)
out = F.relu(out)
return out
class ResNet(nn.Module):
def __init__(self, ResidualBlock, num_classes=10):
super(ResNet, self).__init__()
self.inchannel = 64
self.conv1 = nn.Sequential(
nn.Conv2d(3, 64, kernel_size=3, stride=1, padding=1, bias=False),
nn.BatchNorm2d(64),
nn.ReLU()
)
self.layer1 = self.make_layer(ResidualBlock, 64, 2, stride=1)
self.layer2 = self.make_layer(ResidualBlock, 128, 2, stride=2)
self.layer3 = self.make_layer(ResidualBlock, 256, 2, stride=2)
self.layer4 = self.make_layer(ResidualBlock, 512, 2, stride=2)
self.fc = nn.Linear(512, num_classes)
def make_layer(self, block, channels, num_blocks, stride):
strides = [stride] + [1] * (num_blocks - 1)
layers = []
for stride in strides:
layers.append(block(self.inchannel, channels, stride))
self.inchannel = channels
return nn.Sequential(*layers)
def forward(self, x):
out = self.conv1(x)
out = self.layer1(out)
out = self.layer2(out)
out = self.layer3(out)
out = self.layer4(out)
out = F.avg_pool2d(out, 4)
out = out.view(out.size(0), -1)
out = self.fc(out)
return out
def ResNet18():
return ResNet(ResidualBlock)(2)ResNet34
class CommonBlock(nn.Module):
def __init__(self, in_channel, out_channel, stride):
super(CommonBlock, self).__init__()
self.conv1 = nn.Conv2d(in_channel, out_channel, kernel_size=3, stride=stride, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(out_channel)
self.conv2 = nn.Conv2d(out_channel, out_channel, kernel_size=3, stride=stride, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(out_channel)
def forward(self, x):
identity = x
x = F.relu(self.bn1(self.conv1(x)), inplace=True)
x = self.bn2(self.conv2(x))
x += identity
return F.relu(x, inplace=True)
class SpecialBlock(nn.Module):
def __init__(self, in_channel, out_channel, stride):
super(SpecialBlock, self).__init__()
self.change_channel = nn.Sequential(
nn.Conv2d(in_channel, out_channel, kernel_size=1, stride=stride[0], padding=0, bias=False),
nn.BatchNorm2d(out_channel)
)
self.conv1 = nn.Conv2d(in_channel, out_channel, kernel_size=3, stride=stride[0], padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(out_channel)
self.conv2 = nn.Conv2d(out_channel, out_channel, kernel_size=3, stride=stride[1], padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(out_channel)
def forward(self, x):
identity = self.change_channel(x)
x = F.relu(self.bn1(self.conv1(x)), inplace=True)
x = self.bn2(self.conv2(x))
x += identity
return F.relu(x, inplace=True)
class ResNet34(nn.Module):
def __init__(self, classes_num):
super(ResNet34, self).__init__()
self.prepare = nn.Sequential(
nn.Conv2d(3, 64, 7, 2, 3),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.MaxPool2d(3, 2, 1)
)
self.layer1 = nn.Sequential(
CommonBlock(64, 64, 1),
CommonBlock(64, 64, 1),
CommonBlock(64, 64, 1)
)
self.layer2 = nn.Sequential(
SpecialBlock(64, 128, [2, 1]),
CommonBlock(128, 128, 1),
CommonBlock(128, 128, 1),
CommonBlock(128, 128, 1)
)
self.layer3 = nn.Sequential(
SpecialBlock(128, 256, [2, 1]),
CommonBlock(256, 256, 1),
CommonBlock(256, 256, 1),
CommonBlock(256, 256, 1),
CommonBlock(256, 256, 1),
CommonBlock(256, 256, 1)
)
self.layer4 = nn.Sequential(
SpecialBlock(256, 512, [2, 1]),
CommonBlock(512, 512, 1),
CommonBlock(512, 512, 1)
)
self.pool = nn.AdaptiveAvgPool2d(output_size=(1, 1))
self.fc = nn.Sequential(
nn.Dropout(p=0.5),
nn.Linear(512, 256),
nn.ReLU(inplace=True),
nn.Dropout(p=0.5),
nn.Linear(256, classes_num)
)
def forward(self, x):
x = self.prepare(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.pool(x)
x = x.reshape(x.shape[0], -1)
x = self.fc(x)
return x(3)ResNet50
class Res50(nn.Module):
def __init__(self, pretrained=True):
super(Res50, self).__init__()
self.de_pred = nn.Sequential(Conv2d(1024, 128, 1, same_padding=True, NL='relu'),
Conv2d(128, 1, 1, same_padding=True, NL='relu'))
initialize_weights(self.modules())
res = models.resnet50(pretrained=pretrained)
self.frontend = nn.Sequential(
res.conv1, res.bn1, res.relu, res.maxpool, res.layer1, res.layer2
)
self.own_reslayer_3 = make_res_layer(Bottleneck, 256, 6, stride=1)
self.own_reslayer_3.load_state_dict(res.layer3.state_dict())
def forward(self,x):
x = self.frontend(x)
x = self.own_reslayer_3(x)
x = self.de_pred(x)
x = F.upsample(x,scale_factor=8)
return x
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
m.weight.data.normal_(0.0, std=0.01)
if m.bias is not None:
m.bias.data.fill_(0)
elif isinstance(m, nn.BatchNorm2d):
m.weight.fill_(1)
m.bias.data.fill_(0)
def make_res_layer(block, planes, blocks, stride=1):
downsample = None
inplanes=512
if stride != 1 or inplanes != planes * block.expansion:
downsample = nn.Sequential(
GauConv2d(inplanes, planes * block.expansion,
4, bias=False),
nn.BatchNorm2d(planes * block.expansion),
)
layers = []
layers.append(block(inplanes, planes, stride, downsample))
inplanes = planes * block.expansion
for i in range(1, blocks):
layers.append(block(inplanes, planes))
return nn.Sequential(*layers)
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(Bottleneck, self).__init__()
self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride,
padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(planes)
self.conv3 = nn.Conv2d(planes, planes * self.expansion, kernel_size=1, bias=False)
self.bn3 = nn.BatchNorm2d(planes * self.expansion)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out (4)ResNet101
# -*- coding: utf-8 -*-
# @Author: Song Dejia
# @Date: 2018-10-21 12:58:05
# @Last Modified by: Song Dejia
# @Last Modified time: 2018-10-23 14:47:57
import math
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.utils.model_zoo as model_zoo
class Bottleneck(nn.Module):
"""
通过 _make_layer 来构造Bottleneck
具体通道变化:
inplanes -> planes -> expansion * planes 直连 out1
inplanes -> expansion * planes 残差项 res
由于多层bottleneck级连 所以inplanes = expansion * planes
总体结构 expansion * planes -> planes -> expansion * planes
注意:
1.输出 ReLu(out1 + res)
2.与普通bottleneck不同点在于 其中的stride是可以设置的
3.input output shape是否相同取决于stride
out:[x+2rate-3]/stride + 1
res:[x-1]/stride + 1
"""
expansion = 4
def __init__(self, inplanes, planes, stride=1, rate=1, downsample=None):
super(Bottleneck, self).__init__()
self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride, dilation=rate, padding=rate, bias=False)
self.bn2 = nn.BatchNorm2d(planes)
self.conv3 = nn.Conv2d(planes, planes * 4, kernel_size=1, bias=False)
self.bn3 = nn.BatchNorm2d(planes * 4)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride
self.rate = rate
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
class ResNet(nn.Module):
def __init__(self, nInputChannels, block, layers, os=16, pretrained=False):
self.inplanes = 64
super(ResNet, self).__init__()
if os == 16:
strides = [1, 2, 2, 1]
rates = [1, 1, 1, 2]
blocks = [1, 2, 4]
elif os == 8:
strides = [1, 2, 1, 1]
rates = [1, 1, 2, 2]
blocks = [1, 2, 1]
else:
raise NotImplementedError
# Modules
self.conv1 = nn.Conv2d(nInputChannels, 64, kernel_size=7, stride=2, padding=3, bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 64, layers[0], stride=strides[0], rate=rates[0])#64, 3
self.layer2 = self._make_layer(block, 128, layers[1], stride=strides[1], rate=rates[1])#128 4
self.layer3 = self._make_layer(block, 256, layers[2], stride=strides[2], rate=rates[2])#256 23
self.layer4 = self._make_MG_unit(block, 512, blocks=blocks, stride=strides[3], rate=rates[3])
self._init_weight()
if pretrained:
self._load_pretrained_model()
def _make_layer(self, block, planes, blocks, stride=1, rate=1):
"""
block class: 未初始化的bottleneck class
planes:输出层数
blocks:block个数
"""
downsample = None
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.inplanes, planes * block.expansion, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(planes * block.expansion),
)
layers = []
layers.append(block(self.inplanes, planes, stride, rate, downsample))
self.inplanes = planes * block.expansion
for i in range(1, blocks):
layers.append(block(self.inplanes, planes))
return nn.Sequential(*layers)
def _make_MG_unit(self, block, planes, blocks=[1,2,4], stride=1, rate=1):
downsample = None
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.inplanes, planes * block.expansion, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(planes * block.expansion),
)
layers = []
layers.append(block(self.inplanes, planes, stride, rate=blocks[0]*rate, downsample=downsample))
self.inplanes = planes * block.expansion
for i in range(1, len(blocks)):
layers.append(block(self.inplanes, planes, stride=1, rate=blocks[i]*rate))
return nn.Sequential(*layers)
def forward(self, input):
x = self.conv1(input)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
low_level_feat = x
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
return x, low_level_feat
def _init_weight(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
# n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
# m.weight.data.normal_(0, math.sqrt(2. / n))
torch.nn.init.kaiming_normal_(m.weight)
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
def _load_pretrained_model(self):
pretrain_dict = model_zoo.load_url('https://download.pytorch.org/models/resnet101-5d3b4d8f.pth')
model_dict = {}
state_dict = self.state_dict()
for k, v in pretrain_dict.items():
if k in state_dict:
model_dict[k] = v
state_dict.update(model_dict)
self.load_state_dict(state_dict)
def ResNet101(nInputChannels=3, os=16, pretrained=False):
model = ResNet(nInputChannels, Bottleneck, [3, 4, 23, 3], os, pretrained=pretrained)
return model(5)ResNet152
model_urls = {'resnet152': 'https://download.pytorch.org/models/resnet152-b121ed2d.pth'}
def conv3_3(in_planes,out_planes,stride = 1,groups = 1,dilation = 1):
'''3*3卷积,其中bias=False是因为加入BN层,没有必要加入偏置项'''
return nn.Conv2d(in_planes,out_planes,kernel_size = 3,stride = stride,
padding = dilation,groups = groups,bias = False,dilation = dilation)
def conv1_1(in_planes,out_planes,stride = 1):
'''1*1卷积'''
return nn.Conv2d(in_planes,out_planes,kernel_size=1,stride=stride,bias = False)
class Bottleneck(nn.Module):
'''resnet单元,大于50层的加入了1*1卷积降维升维的部分,主要目的是降低参数量'''
expansion = 4
def __init__(self,inplanes,planes,stride=1,downsample=None,groups = 1,
base_width=64,dilation=1,norm_layer = None):
super(Bottleneck,self).__init__()
if norm_layer is None:
norm_layer = nn.BatchNorm2d
#这里默认卷积分为1组64个channel,还可以分多个groups,每个groups设置width_per_group个channel
width = int(planes*(base_width/64.))*groups
self.conv1 =conv1_1(inplanes,width)
self.bn1 = norm_layer(width)
self.conv2 = conv3_3(width,width,stride,groups,dilation)
self.bn2 = norm_layer(width)
self.conv3 = conv1_1(width,planes*self.expansion)
self.bn3 = norm_layer(planes*self.expansion)
self.relu = nn.ReLU(inplace=True)
#加入SENet的位置
#self.se = SELayer(planes * 4, reduction)
self.downsample = downsample
self.stride = stride
def forward(self,x):
identity = x
#1*1卷积
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
#3*3卷积
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
#1*1卷积
out = self.conv3(out)
out = self.bn3(out)
# 加入SENet的位置
# out = self.se(out)
if self.downsample is not None:
identity = self.downsample(x)
out += identity
out = self.relu(out)
return out
class ResNet(nn.Module):
def __init__(self,block,layers,num_classes=1000,groups = 1,width_per_group=64,
norm_layer=None):
super(ResNet,self).__init__()
if norm_layer is None:
norm_layer = nn.BatchNorm2d
self._norm_layer = norm_layer
self.inplanes = 64
self.dilation = 1
self.groups = groups
self.base_width = width_per_group
self.conv1 = nn.Conv2d(3,self.inplanes,kernel_size=7,stride=2,padding = 3,bias=False)
self.bn1 = norm_layer(self.inplanes)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3,stride=2,padding=1)
self.layer1 = self._make_layer(block,64,layers[0])
self.layer2 = self._make_layer(block,128,layers[1],stride=2)
self.layer3 = self._make_layer(block, 256, layers[2], stride=2)
self.layer4 = self._make_layer(block, 512, layers[3], stride=2)
self.avgpool = nn.AdaptiveAvgPool2d((1,1))
self.fc = nn.Linear(512*block.expansion,num_classes)
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
elif isinstance(m, (nn.BatchNorm2d, nn.GroupNorm)):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
def _make_layer(self,block,planes,blocks,stride=1,dilate=False):
norm_layer = self._norm_layer
downsample = None
previous_dilation = self.dilation
if dilate:
self.dilation *= stride
stride = 1
if stride != 1 or self.inplanes != planes * block.expansion:
#这里是为了转换为相同的维度能够进行shortcut,即尺寸和维度都要相同
downsample = nn.Sequential(
conv1_1(self.inplanes, planes * block.expansion, stride),
norm_layer(planes * block.expansion),
)
#以下这个地方挺绕,先添加第一个block,然后再改变输入维度为planes*4,然后再添加剩余block
#其中self.inplanes=64开始,每个block结束通道变为palnes*4
layers=[]
layers.append(block(self.inplanes,planes,stride,downsample,self.groups,
self.base_width,previous_dilation,norm_layer))
self.inplanes = planes*block.expansion
for _ in range(1,blocks):
layers.append(block(self.inplanes, planes, groups=self.groups,
base_width=self.base_width, dilation=self.dilation,
norm_layer=norm_layer))
return nn.Sequential(*layers)
def forward(self,x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.avgpool(x)
x = torch.flatten(x,1)
x = self.fc(x)
return x
def _resnet(arch,block,layers,pretrained,progress,**kwargs):
model = ResNet(block,layers,**kwargs)
if pretrained:
state_dict = load_state_dict_from_url(model_urls[arch],progress=progress)
model.load_state_dict(state_dict)
return model
def resnet152(pretrained=False, progress=True, **kwargs):
return _resnet('resnet152', Bottleneck, [3, 8, 36, 3], pretrained, progress,**kwargs)