【图像处理】基于matlab边缘检测 Sobel、Roberts、Prewitt
matlab边缘检测 Sobel、Roberts、Prewitt
- 一、Sobel边缘检测算法
-
- 1、算法简介
- 2、matlab实现
- 3、Sobel检测结果
- 二、Roberts边缘检测算法
-
- 1、算法简介
- 2、matlab实现
- 3、roberts检测结果
- 三、Prewitt边缘检测算法
-
- 1、算法简介
- 2、matlab实现
- 3、Prewitt检测结果
一、Sobel边缘检测算法
1、算法简介
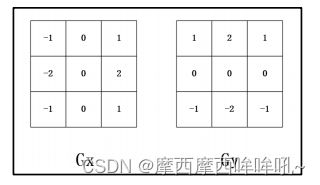
Sobel 算子算子包含两组 3x3 的矩阵,如图所示:
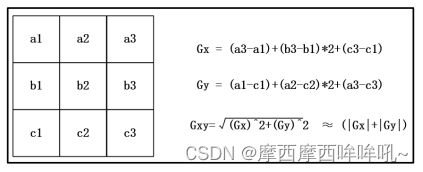
对于图像而言,取 3 行 3 列的图像数据,将图像数据与对应位置的算子的值相乘再相加,得到 x 方向的 Gx ,和 y 方向的 Gy ,将得到的 Gx 和 Gy ,平方后相加,再取算术平方根,得到 Gxy ,近似值为 Gx 和 Gy 绝对值之和,将计算得到的 Gxy 与我们设定的阈值相比较,Gxy 如果大于阈值,表示该点为边界点,此点显示黑点,否则显示白点。如图所示:
2、matlab实现
clear;
sob=imread('bianyuan1.jpg'); %读取原图像
grayPic=mat2gray(sob); %矩阵归一化
[m,n]=size(grayPic); %获取图片大小
newGrayPic=grayPic; %保留图像边缘一个像素
sobelNum=0;
sobelThreshold=0.5; %设定阈值
for j=2:m-1 %进行边界提取
for k=2:n-1
sobelNum=abs(grayPic(j-1,k+1)+2*grayPic(j,k+1)+grayPic(j+1,k+1)-grayPic(j-1,k-1)-2*grayPic(j,k-1)-grayPic(j+1,k-1))+abs(grayPic(j-1,k-1)+2*grayPic(j-1,k)+grayPic(j-1,k+1)-grayPic(j+1,k-1)-2*grayPic(j+1,k)-grayPic(j+1,k+1));
if(sobelNum > sobelThreshold)
newGrayPic(j,k)=255;
else
newGrayPic(j,k)=0;
end
end
end
figure;
imshow(newGrayPic);
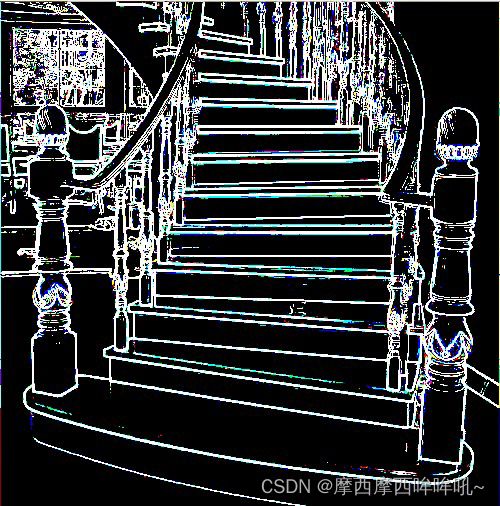
3、Sobel检测结果

二、Roberts边缘检测算法
1、算法简介
Roberts算子是一种斜向偏差分的梯度计算方法,梯度的大小代表边缘的强度,梯度的方向与边缘的走向垂直(正交)。
梯度算子定义为:
![]()
可以近似为:
![]()
由此,我们可得图像离散化(差分代替偏导)的对角线Roberts算子:
![]()

2、matlab实现
clear;
rob=imread('bianyuan1.jpg'); %读取原图像
gp=mat2gray(rob); %图像矩阵归一化
[m,n]=size(gp); %计算图像大小
newGrayPic=gp;
robertsNum=0; %经Roberts算子计算得到的每个像素的值
robertThreshold=0.2; %设定阈值
for j=1:m-1 %进行边界提取
for k=1:n-1
robertsNum=abs(gp(j,k)-gp(j+1,k+1))+abs(gp(j+1,k)-gp(j,k+1));
if(robertsNum > robertThreshold)
newGrayPic(j,k)=255;
else
newGrayPic(j,k)=0;
end
end
end
figure;
imshow(newGrayPic);
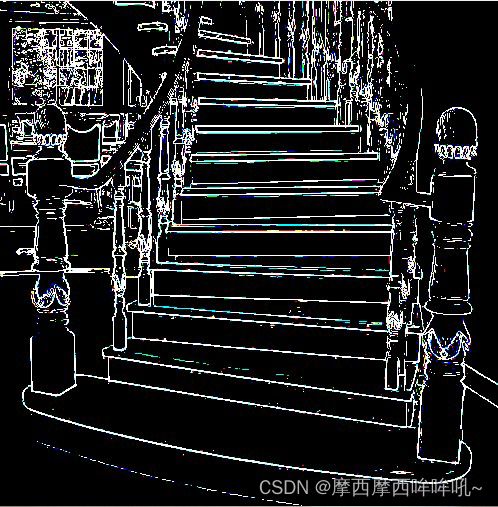
3、roberts检测结果
三、Prewitt边缘检测算法
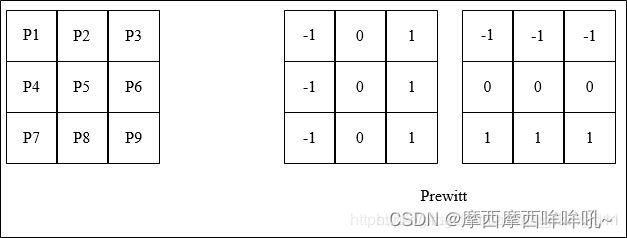
1、算法简介
Prewitt算子也是一种一阶微分算子,与Robert使用22的模板不同,Prewitt算子使用的是33的模板,利用像素点上下、左右邻点的灰度差来检测边缘,故其边缘检测结果在水平方向和垂直方向均比Robert算子更加明显。

例如,下面给出Prewitt算子的模板,在像素点P5处 x 和 y 方向上的梯度大小 g_x 和 g_y 分别计算为:
![]()
2、matlab实现
clear;
pre=imread('bianyuan1.jpg'); %读取原图像
gp=mat2gray(pre); %图像矩阵归一化
[m,n]=size(gp);
newGrayPic=gp; %保留图像边缘一个像素
PrewittNum=0;
PrewittThreshold=0.5; %设定阈值
for j=2:m-1 %进行边界提取
for k=2:n-1
PrewittNum=abs(gp(j-1,k+1)-gp(j+1,k+1)+gp(j-1,k)-gp(j+1,k)+gp(j-1,k-1)-gp(j+1,k-1))+abs(gp(j-1,k+1)+gp(j,k+1)+gp(j+1,k+1)-gp(j-1,k-1)-gp(j,k-1)-gp(j+1,k-1));
if(PrewittNum > PrewittThreshold)
newGrayPic(j,k)=255;
else
newGrayPic(j,k)=0;
end
end
end
figure;
imshow(newGrayPic);
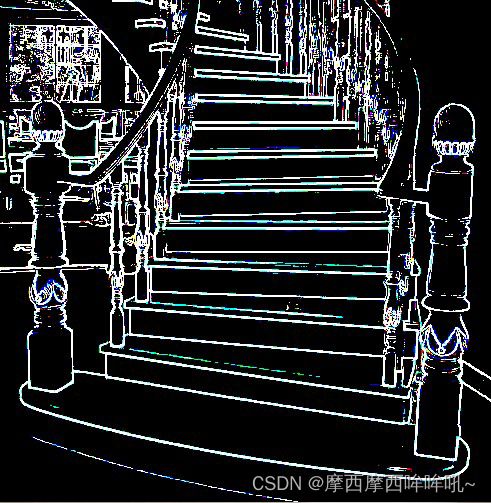
3、Prewitt检测结果
参考:
链接: 基于Sobel算法的边缘检测简介
链接: Roberts算子边缘检测原理及实现
链接: 图像边缘检测之Prewitt算子